Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
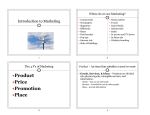
Investigating Power Management in a Robot Colony Meeting of the Minds Symposium May 7, 2008 Christopher Mar and Austin Buchan Colony Project, Robotics Club Colony Project Ongoing Robotics Club project, started in 2003 About 20 undergraduates – – All years represented Mostly Engineering and CS majors Weekly status meeting plus work nights throughout the week 2 Colony Robot Bearing and Orientation Module (BOM) Dragonfly Microcontroller Board Tri-color LED x 2 Sharp IR Rangefinders Motors 3 Goals Low-cost Robots (~$350) Homogenous, distributed architecture Develop applications that are robust to non-idealities: – – – Noisy sensor data Limited computation Communication delays Use the Colony as a research platform – – – – – – Emergent behaviors Path planning Controls Cooperation and task management Simultaneous Localization and Mapping (SLAM) ... 4 Why Recharging? Goal is to perform long-term tasks with multiple robots Tasks completed with minimal human intervention – On-the-fly task allocation and management – No humans (or monkeys) changing batteries Fuel Cells Charging Station Obstacle Warehouse Factory Task Model 5 Autonomous Recharging Hardware – Robot – Software – Detect and interface with charging station Regulate charge cycle Robot Environment, Station Supply power Produce homing signals – Recognize need to charge Locate and home on charging station Environment, Station Manage charging bay allocation Battery prioritizing algorithm 6 Robot Charging Hardware Charge Board – High current circuitry – Controlled by dedicated microprocessor – Communicates with robot over I2C Homing Senor Wireless communication and BOM localization 7 Charging Bay Tricolor Orb Wireless Module BOM Segment Homing Beacons Power/I2C Connections Charging Contacts 8 Power Management Topology ATX Power Supply Wireless Network Power Data Bay Bay … Bay 9 Docking with Bay – Procedure Request charge bay, wait for accept Locate bay, get in homing range Home to docking bay Dock Wireless BOM/Wireless Homing Sensor Robot Hardware 10 Autonomous Recharging Video Beacon IR Beacon Homing Max pulse width Left n Center 3n Right 2n 12 Charge Board Charge Board monitors battery, manages charging – – Temperature and Voltage Observation Current Control Necessary for fast, high current charging 13 Charging Algorithm •Regulate current into battery to maintain constant 1C (2.6A) charge •Terminate at either –Voltage Drop threshold –Temperature dT/dt threshold •Trickle charge an option if robot not needed immediately 14 ColoNet ● Remote control and monitoring of the Colony over the Internet ● Global Colony task queuing ● Monitoring and recording of wireless communications ● Web-based Java GUI Colony Members Austin Buchan Christopher Mar Brian Coltin Siyuan Feng Jason Knichel James Kong Eugene Marinelli Brad Neuman Gregory Tress Justin Scheiner Andrew Yeager Kevin Woo •Jimmy Bourne •Rich Hong •Victor Marmol •Evan Mullinix •Ben Poole •John Sexton •David Schultz •Bradley Yoo •Prof. George Kantor 16 www.robotcolony.org 17