Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
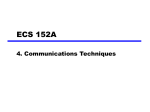
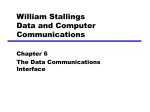
UNIT-III DATA AND PULSE COMMUNICATION History of Data Communication 1837- Telegraph was invented by Samuel Morse 1849- First slow speed telegraph printer 1876- Telephone was invented 1949- All electronic diode based computer 1969- Internet began to evolve Network Standards Why Standards? • Standards provide a fixed way for hardware and/or software systems to communicate. • For example, USB enables two pieces of equipment to interface even though they are manufactured by different companies. • By allowing hardware and software from different companies to interconnect, standards help promote competition. Types of Standards • There are two main types of standards: • Formal: a standard developed by an industry or government standardsmaking body • De facto: standards that emerge in the marketplace and are widely used, but lack official backing by a standardsmaking body The Standardization Processes Three Steps • Specification: developing the nomenclature and identifying the problems to be addressed. • Identification of choices: identify solutions to the problems and choose the “optimum” solution. • Acceptance: defining the solution, getting it recognized by industry so that a uniform solution is accepted. Some Major Standards Making Bodies • ISO: International Organization for Standardization (www.iso.ch) • ITU-T: International Telecommunications Union – Telecom Group (www.itu.int) • ANSI: American National Standards Institute (www.ansi.org) • IEEE: Institute of Electrical and Electronic Engineers (see standards.ieee.org) • IETF: Internet Engineering Task Force (www.ietf.org) Digital Data Transmission • The transmission of binary data across a link can be accomplished either in parallel mode or serial mode • In parallel mode, multiple bits are sent with each clock pulse • In serial mode, one bit is sent with each clock pulse • There are 2 subclasses of serial transmission: synchronous and asynchronous Parallel Transmission • Binary data may be organized into groups of n bits each • By grouping, we can send data n bits at a time instead of one. This is called parallel transmission • The advantage of parallel transmission is speed but its advantage is cost FIGURE 3-8: PARALLEL DATA TRANSMISSION Used most often for communication with Serial Transmission • In serial transmission, one bit follows another, so we need only one communicating channel to transmit data between 2 communicating devices • The advantage of serial transmission is the reduction of the cost of transmission over the parallel transmission • Serial transmission occurs in one of 2 ways: asynchronous or synchronous FIGURE 3-9: SERIAL DATA TRANSMISSION Asynchronous Transmission • In asynchronous transmission, the timing of a signal is unimportant • Information is received and translated by agreed-upon patterns • Patterns are based on grouping the bit stream into bytes • The sending system handles each group independently, relaying it to the link whenever ready, without regard to a timer Asynchronous Transmission (cont.) • To alert the receiver to the arrival of a new group, an extra bit called start bit is added to the beginning of each byte • To let the receiver know that the byte is finished, one or more additional bits called stop bits are appended to the end of the byte • This mechanism is called asynchronous because at the byte level, sender and receiver do not have to be synchronized • But within each byte, the receiver must still be synchronized with the incoming bit stream Asynchronous Transmission (cont.) • When the receiver detects a start bit, it sets a timer and begins counting bits as they come in • After n bits, the receiver looks for a stop bit and after the stop bit is detected, it ignores any received pulses until the next start bit Synchronous Transmission • In synchronous transmission, the bit stream is combined into longer frames which may contains multiple bytes • Each byte is introduced onto the transmission link without a gap between it and the next one • It is the responsibility of the receiver to reconstruct the information Synchronous Transmission (cont.) • Without gaps and start/stop bits, timing becomes very important therefore the accuracy of the received information is completely dependent on the ability of the receiver to keep an accurate count of the bits as they come in Simplex, Half-Duplex, and FullDuplex Transmission • A communications channel is classified as one of three types: (depending on the direction of transfer) – Simplex – Full-Duplex – Half-Duplex • Simplex: a simplex mechanism can only transfer data in a single direction – It is analogous to broadcast radio or television – Figure 9.8a illustrates simplex communication • Full-Duplex: allows transmission in two directions simultaneously – It is analogous to a voice telephone conversation • in which a participant can speak even if they are able to hear background music at the other end – Figure 9.8b illustrates the concept DTE-DCE Interface • There are usually four basic functional units involved in the communication of data: a DTE and DCE on both end of transmission • The DTE generates the data and pass them to a DCE. The DCE converts the signal to a format appropriate to the transmission medium • When the signal arrives at the receiving end, this process is reversed Data Terminal Equipment (DTE) • DTE includes any unit that functions either as a source of or as a destination for binary digital data • It can be a terminal, microcomputer, printer, fax machine and etc. Fax Data Circuit-Terminating Equipment (DCE) • DCE includes any functional unit that transmits or receives data in the form of an analog or digital signal through a network • Commonly used DCEs include modems Modem DTE-DCE Interface Standard • Many standards have been developed to define the connection between a DTE and a DCE • Each standard provides a model for the mechanical, electrical, and functional characteristics of the connection • The most active organizations defining the interface standard are the Electronic Industries Association (EIA) and the International Telecommunication Union-Telecommunication Standards Committee (ITU-T) DTE-DCE Interface Standard (cont.) • The EIA standards are called EIA-232, EIA-422, EIA-449, and so on • The ITU-T standards are called the V series and the X series EIA-232 Interface • Originally issued in 1962 as the RS-232 standard (recommended standard) • The most recent version, EIA-232-D, defines not only the type of connectors to be used but also the specific cable and plugs and the functionality of each pin EIA-232 Mechanical specification • The EIA-232 defines the interfaces as a 25-wire cable with a male and a female DB-25 pin connection attached to either end. The length of the cable may not exceed 15 meters • A DB-25 connector is a plug with 25 pins, each of which is attached to a single wire with a specific function. However, fewer are actually used in current practice • Another implementation of EIA-232 uses a 9-wire cable with a mail and a female DB-9 pin connector attached to either end • 9-pin connector is more commonly found in PCs but it covers signals for asynchronous serial communication only • Male connector is used on DTE and female connector is used on DCE Electrical Specification • EIA-232 states that all data must be transmitted as logical 1s and 0s (called mark and space) using NRZ-L encoding, with 0 defined as a positive voltage and 1 defined as a negative voltage • EIA-232 defines 2 distinct ranges, one for positive voltages and one for negative • To be recognized as data, the amplitude of a signal must fall between 3 and 15 volts or between -3 and -15 volts • EIA-232 allows for a maximum bit rate of 20 kbps, although in practice this often is exceeded Functional Specification DB-25 Implementation DB-9 Implementation Functioning of EIA-232 in Synchronous Full-Duplex Transmission Flow Control • Means to ask the transmitter to stop/resume sending in data • Required when: – DTE to DCE speed > DCE to DCE speed (e.g. terminal speed = 115.2kbps and line speed = 33.6kbps, in order to benefit from modem’s data compression protocol) • without flow control, the buffer within modem will overflow – sooner or later – the receiving end takes time to process the data and thus cannot be always ready to receive Modem • The most familiar type of DCE is a modem • Modem is derived from the words Modulator and Demodulator • It is an electronics device used to transmit information of a computer to the destination through the telephone channel Telephone Bandwidth • Traditional telephone line can carry frequencies between 300 Hz and 3300 Hz (note: some say that 3400 Hz) • All of this range is used for transmitting voice, where a great deal of interference and distortion can be accepted without loss of intelligibility • However, the edges of this range cannot support the transmission of base-band digital data Bell Modems • The first commercial modems were produced by the Bell Telephone Company in the early 1970 ITU-T Bell Baud Rate Bit Rate Modulation V.21 103 300 300 FSK V.22 212 600 1200 4-PSK V.23 202 1200 1200 FSK V.26 201 1200 2400 4-PSK V.27 208 1600 4800 8-PSK V.29 209 2400 9600 16-QAM DATA COMMUNICATION CODES MORSE CODE • First character code developed • For transmitting data over telegraph wires – telegrams (remember Western Union) • Used dots (short beep) and dashes (long beeps) instead of 1’s and 0’s • More frequent the character, the fewer the beeps • Problems: – variable “length” character representation FIGURE 3-2: MORSE CODE BAUDOT CODE • One of first codes developed for machine to machine communication • Uses 1’s and 0’s instead of dots and dashes • For transmitting telex messages (punch tape) • Fixed character length (5-bits) – 32 different codes – increased capacity by using two codes for shifting BAUDOT CODE (cont.) • Problems: – required shift code to switch between character sets – no lower case, few special characters – no error detection mechanism – characters not ordered by binary value – designed for transmitting data, not for data processing • International Baudot – Added a 6th bit for parity FIGURE 3-3: BAUDOT CODE EBCDIC • Extended Binary Coded Decimal Interchange Code • 8-bit character code developed by IBM – – – – used for data communication, processing and storage extended earlier proprietary 6-bit BCD code designed for backward compatibility or marketing? still in use today on some mainframes and legacy systems. • Allows for 256 different character representations (28) – includes upper and lower case ASCII CODE • American Standard Code for Information Interchange • 7-bit code developed by the American National Standards Institute (ANSI) – most popular data communication character code today • Allows for 128 different character representations (27) – includes upper and lower case – lots of special characters (non-printable) – generally used with an added parity bit FIGURE 3-5: 7-BIT ASCII CODE Error detection Error detection means to decide whether the received data is correct or not without having a copy of the original message. Error detection uses the concept of redundancy, which means adding extra bits for detecting errors at the destination. Types of Errors Single-bit error Burst error Redundancy Four types of redundancy checks are used in data communications Vertical Redundancy Check VRC Longitudinal Redundancy Check LRC VRC and LRC Checksum Cyclic Redundancy Check CRC Cyclic Redundancy Check • Given a k-bit frame or message, the transmitter generates an n-bit sequence, known as a frame check sequence (FCS), so that the resulting frame, consisting of (k+n) bits, is exactly divisible by some predetermined number. • The receiver then divides the incoming frame by the same number and, if there is no remainder, assumes that there was no error. Binary Division Error Correction It can be handled in two ways: 1) receiver can have the sender retransmit the entire data unit. 2) The receiver can use an error-correcting code, which automatically corrects certain errors. Single-bit error correction To correct an error, the receiver reverses the value of the altered bit. To do so, it must know which bit is in error. Number of redundancy bits needed • Let data bits = m • Redundancy bits = r Total message sent = m+r The value of r must satisfy the following relation: 2r ≥ m+r+1 Error Correction Hamming Code Hamming Code