Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
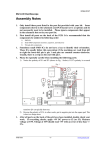
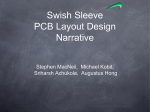
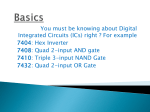
DARSI 2 CDR Data Acquisition & Real-time System Integration Presentation Outline: •Project Overview •Components: •Design •Status Adrienne Baile Preston Schipper Matt Hulse •Administrative DARSI: Project Overview Data Processing System Sensors Data Collection Data Storage Data Display Traction Control CAN Network Where Are We Now? Surface Mount Components Traction Control • Multi sensor ability added to data collection boards • Control system modeled • Engine control revisited • Surface mount PCB’s in development LCD CAN Bus Master • Wire-wrapped prototype • CAN library packaged • Functioning code • Expanding data frame capabilities • Investigating off chip memory configuration Surface Mount Data Storage Board Multi-Sensor Board Status: Shipping Status: Shipping • PIC18F458 TQFP for surface mount • Deutsch Weatherproof 4 pin PCB connectors for CAN/Power • Multiple sensor hook-ups • Utilizing 3 more A/D conversion pins on PIC18F258 • Deutsch Weatherproof 4 pin PCB connectors for CAN/Power and 6 pin PCB connector for all 4 sensors Surface Mount Details Final Dimensions: Multi-Sensor Unit: 2” x 2” Data Storage Unit: 2” x 4” LCD Control Unit: 2.95” x 2.07” LCD Module Status: Prototype Board - Code Testing • Real-time display of important data traveling over CAN bus to driver • Menu interface with screen selections • Current display highlighted on bottom LCD Components • Crystal Fontz LCD CFAG12864B-TMI-V • PIC18F458 Microcontroller • STMicroelectronics Serial Flash Storage • Status: Components on Order • Need ~5kB of storage • M45PE20-VMN6P 2 Mbit Storage • SPI serial communication supported by PIC • Maxim MAX3002 bi-directional octal level translator LCD Code Code Status: Final Testing LCD Memory Layout LCD Code Code Status: Final Testing LCD Timing Traction Control System Block Diagram Status: Code Development • Ducatti Motorcycle System Engineer helping with control system model • Block Diagram Control Traction Control System Control Scheme • ECU Ignition Control • FSAE Rule Conditions • The rules specify that a purely mechanical throttle body must be used for safety reasons • A second throttle body can be used in series that is electronically controlled using a stepper motor Traction Control Code • Determine Wheel Slip • (rear rate / front rate) >= 1.03 is the starting point for wheel slip • Stepper Controller • When no wheel slip occurs keep stepper throttle open • When slip occurs vary throttle based on calculated control • Calculate Throttle Control and Ignition Timing Adjustment • If slip occurs move stepper to mechanical throttle position • Increment further closed based on the amount of wheel slip • Introduce ignition timing changes based on car velocity • This last piece will require lots of testing on the car to find acceptable rates of throttle control Bus Master Module Status: Enhancing Code Can Functions: •breakdown •enable_CAN_transmit •disable_CAN_transmit •configure_CAN_controller •check_data_req •request_send •can_send •can_receive Features & Capability: •No longer need main storage module to regulate CAN functions •No longer need central power distribution Ultimate Goal: CAN discovery and dynamic build-up of sensor network Fallback Goal: CAN bus master still implement-able on any board Parts List Development Environment: Microchip MPLab IDE version 7.31 PICStart Plus! Programmer / ICSP Development Kit Component Name Miconcontroller Microcontroller LCD Stepper Motor CAN Amplifiers Inverter w/ Schmitt Trigger Clock Pentiometer Voltage Regulator 4 pin receptacle 4 pin plug 6 pin receptacle 6 pin plug Capacitors 100microCap Resistors Part Package TQFP SOIC Vendor PIC18F458-I/SO Microchip PIC18F258-I/SO Microchip CFAG12864B-TMI-V Crystalfontz Size 17 With PCB Controller Iterinar Electronics MCP2551-I/SN SOIC Microchip LF356M SOIC National Semiconductor SN74LS14D SOIC Texas Instuments SM77M Advanced Package Pletronics EWV-YC8B14 Surface mount Panasonic MC7805CD2TR4 DDPak-3 ON Semiconductor DTM04-4P Deutsch DTM06-4S Deutsch DTM04-6P Deutsch DTM06-6S Deutsch 805 Capstone HB Surface Mount Panasonic Digikey Labor & Responsibilities Adrienne: Matt: Circuit Schematics Software Development PCB Designs Multi Sensor Units LCD Control Logic Preston: LCD Display Logic Traction Control CAN Bus Master Milestone Goals Milestone 1 Goals: Milestone 2 Goals: • Complete surface mount PCB’s for data collection and logger • Creating LCD enclosure • LCD – testing PCB and code •TCS – attempt to install on FSAE car • Continuing to develop code package • CAN renovations in testing • Complete data collection and logger enclosures • Final testing of TCS • Finalize PC interface • Complete CAN Update Schedule: CDR Expo Thank you Questions & Answers