Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Serial digital interface wikipedia , lookup
Embedded system wikipedia , lookup
Electronic engineering wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Coupon-eligible converter box wikipedia , lookup
Phase-locked loop wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Music technology (electronic and digital) wikipedia , lookup
Radio transmitter design wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Inertial navigation system wikipedia , lookup
Power electronics wikipedia , lookup
Index of electronics articles wikipedia , lookup
Rectiverter wikipedia , lookup
Oscilloscope history wikipedia , lookup
Broadcast television systems wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Analog television wikipedia , lookup
Telecommunication wikipedia , lookup
Oscilloscope types wikipedia , lookup
Counter-IED equipment wikipedia , lookup
Lego Mindstorms wikipedia , lookup
Television standards conversion wikipedia , lookup
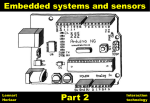
CS244-Introduction to Embedded Systems and Ubiquitous Computing Instructor: Eli Bozorgzadeh Computer Science Department UC Irvine Winter 2010 CS244 – Lecture 7 Sensors, Actuators and Other hardware components Winter 2010- CS 244 2 Simplified Block Diagram actuators ICS212 WQ05 (Dutt) Hardware Components: Sensors, Actuators, Converters Sensors and Actuators Sensors: Capture physical stimulus (e.g., heat, light, sound, pressure, magnetism, or other mechanical motion) Typical generate a proportional electrical current May require analog interface solenoid mic speaker Actuators Convert a command to a physical stimulus (e.g., heat, light, sound, pressure, magnetism, or other mechanical motion) May require analog interface laser diode/transistor compass dc motor accelerometer Sensors Processing of physical data starts with capturing this data. Sensors can be designed for virtually every physical stimulus heat, light, sound, weight, velocity, acceleration, electrical current, voltage, pressure, ... Many physical effects used for constructing sensors. law of induction (generation of voltages in an electric field), light-electric effects. Example: Acceleration Sensor MEMS device Small mass in center When accelerated: Mass displaced from center Resistance of wires connected to mass change Detect change in resistance and model acceleration Courtesy & ©: S. Bütgenbach, TU Braunschweig Charge-coupled devices (CCD) Image Sensors: Based on charge transfer to next pixel cell CMOS Image Sensors Based on standard production process for CMOS chips, allows integration with other components. Source: B. Diericks: CMOS image sensor concepts. Photonics West 2000 Short course (Web) Comparison CCD/CMOS sensors Example: Biometric Sensors Example: Fingerprint sensor (© Siemens, VDE): Integrated into ID mouse. Example: Artificial eyes © Dobelle Institute (www.dobelle.com) Artificial eyes (2) He looks hale, hearty, and healthy — except for the wires. They run from the laptops into the signal processors, then out again and across the table and up into the air, flanking his face like curtains before disappearing into holes drilled through his skull. Since his hair is dark and the wires are black, it's hard to see the actual points of entry. From a distance the wires look like long ponytails. © Dobelle Institute (www.dobelle.com) Other examples of sensors Heart monitoring sensors “Managing Care Through the Air” Rain sensors for wiper control Touch pads/screens Proximity sensors High-end autos Pressure sensors IEEE Spectrum Dec 2004 Collision avoidance Engine control sensors Audio sensors Motion sensors Thermal sensors SARS detection (“high fever”) Simplified Block Diagram actuators Sensors and Actuators Sensors: Capture physical stimulus (e.g., heat, light, sound, pressure, magnetism, or other mechanical motion) Typical generate a proportional electrical current May require analog interface solenoid mic speaker Actuators Convert a command to a physical stimulus (e.g., heat, light, sound, pressure, magnetism, or other mechanical motion) May require analog interface laser diode/transistor compass dc motor accelerometer Actuators Output physical stimulus varies in range and modality Large (industrial) control actuators Optical output Pneumatic systems: physical motion IR Thermal output Small motor controllers (stepper motors) MEMS devices List goes on….. Stepper Motor Controller Stepper motor: rotates fixed number of degrees when given a “step” signal In contrast, DC motor simply rotates when power applied, and coasts to stop Rotation achieved by applying specific voltage sequence to coils Controller greatly simplifies this MEMS Actuators Huge variety of actuators and output devices. Microsystems motors as examples (© MCNC) (Dimensions in the order of several microns) (© MCNC) Actuators Courtesy and ©: E. Obermeier, MAT, TU Berlin Simplified Block Diagram actuators Sample-and-Hold Circuit Model: Vx = Ve when Clock = 1 Sampling: how often the signal is converted. Quantization: how many bits used for sampling. Aliasing Potential Consequence of sampling, e.g.: Signal frequency: 5.6 Hz Sampling frequency: 9 Hz 1.5 1 0.5 0 -0.5 -1 -1.5 aliasing Winter 2010- CS 244 23 Analog to Digital Conversion Sampling: how often is the signal converted? Quantization: how many bits used to represent a sample? Twice as high as the highest frequency signal present in the input Sufficient to provide required dynamic range Under-loading: dynamic range not used properly Clipping: input signal beyond the dynamic range Aliasing: erroneous signals, not present in analog domain, but present in digital domain Use anti-aliasing filters Sample at higher than necessary rate 5.0V 4.5V 4.0V 3.5V 3.0V 2.5V 2.0V 1.5V 1.0V 0.5V 0V 1111 1110 1101 1100 1011 1010 1001 1000 0111 0110 0101 0100 0011 0010 0001 0000 proportionality 4 4 3 3 analog output (V) Vmax = 7.5V 7.0V 6.5V 6.0V 5.5V analog input (V) Analog-to-Digital Converter 2 1 t1 0100 t2 t3 time t4 1000 0110 0101 Digital output analog to digital 2 1 t1 t2 0100 t3 1000 0110 Digital input digital to analog t4 time 0101 Flash A/D Converter Parallel comparison with reference voltage Speed: O(1) HW complexity: O(n) ICS212 WQ05 (Dutt) Hardware Components: Sensors, Actuators, Converters n= # of distinguished voltage levels Frequency Domain Any continuous time varying signal can be represented as the sum of cosine functions of different amplitude and frequency E.g., input signal captured as the sum of 4 cosine functions Once in frequency domain, certain manipulations become trivial (e.g., filtering) ICS212 WQ05 (Dutt) Hardware Components: Sensors, Actuators, Converters Simplified Block Diagram actuators ICS212 WQ05 (Dutt) Hardware Components: Sensors, Actuators, Converters Digital-to-Analog (D/A) Converters Various types, can be quite simple, e.g.: ICS212 WQ05 (Dutt) Hardware Components: Sensors, Actuators, Converters Reference Embedded system design by Peter Mardewel (Chapter: Embedded System Hardware) Embedded System (Foundation for cyber physical systems) by Peter Mardewel, online book through UCI connection, Chapter: Embedded Hardware. (pg. 119-132). Winter 2010- CS 244 30