Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
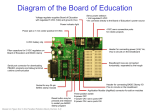
Controlling the Outside World Servo Motor Servo motor • A feedback controlled motor – The Parallax standard servo motor has built in feedback – Range of motion is limited • Parallax also supplies continuous servo motors for robotic applications but… – This is not a continuous servo! • That is, it will not go 360º • It will hit “stops” at either direction around The servo motor Wiring the servo motor • You can wire up the servo on the proto board as shown in the schematic… • …but, there’s an easier way Wiring the servo motor Wiring the servo motor • The X4 and X5 connectors are designed to control the servo motors • But, the power source must be set via the jumper connector Power • Check your power source! – If using a DC power blocks, it may be 9V or it may be 6V – Set the Vdd/Vin jumper as specified • Vdd if using a 9V source (or 9V battery) • Vin if using a 6V source – Power switch must be in position 2 to send power to the X4/X5 (servo) connectors How it works • To light up an LED we send a continuous, level signal (DC voltage) voltage 5v HIGH pin 0v time Controlling the servo • To move the servo horn we send a pulse train 1.5ms voltage 5v 1.5ms 0v 20ms Time (in milli-seconds) Controlling the servo • The pulse width will control the location of the servo • The time between pulses should be 20 milli-seconds From PBASIC • PULSOUT command PULSOUT pin, duration • pin is the pin number to which your servo is wired (12, 13, 14, or 15 if you are using the servo ports on the RevC board) • duration is the pulse width PULSOUT command details • The duration parameter is in units of 2μS (2 micro-seconds) • The servo prefers values in units of milli-seconds • The time between pulses is under software control (PAUSE command – units of milli-seconds) Activity – in class • Test the servo – Test all 4 servo ports • Find the values of the duration parameter (in the PULSOUT command) that cause the servo to hit the stops in both the clockwise and counterclockwise directions Homework • • • • Design a system that continually moves the servo from one stop to the other – That is, it goes from full counter-clockwise to full clockwise and back again, continuously Add two buttons to the board (B1 and B2) – B1 is the emergency stop (EStop) • When it is pressed all servo motion stops – B2 is the reset button • When it is pressed the servo motion begins again Add two LEDs – The red LED lights when the servo is all the way clockwise – The green LED lights when the servo is all the way counterclockwise – Both LEDs are off (not lit) when the servo is somewhere between clockwise and counterclockwise The servo should not “slam” into the stops Deliverables • A state-machine diagram depicting the operation of the system • Source code • A schematic diagram of the circuit • A working demonstration on the Basic Stamp development board (in class)