Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
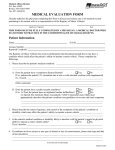
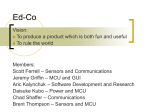
PT 5000 Pooja Rao Ted Tomporowski December 7, 2004 Functional Overview To create an autonomous vehicle that is capable of: Following a reflective tape path from start to finish Stopping at specifically marked checkpoints and waiting for user recognition to continue Display of number of checkpoints reached Diverting from the path to avoid obstacles Specifications Will follow reflective tape path when unobstructed. Will detect obstacles within 2’, and divert from the path in an optimal manner to avoid them Will stop at designated checkpoints Lightweight Will not be affected by ambient light Minimum runtime of 10 minutes Restrictions Maximum number of checkpoints: 3 Obstacle minimum size: 8” wide x 12” long x 2” high Path cannot turn more sharply than the turning radius of the car Obstacles cannot be placed such that they are very close to the track but not on it Checkpoints cannot be obstructed, and must be on straight portions of the track Components Servo Motor DC Motor Sharp GP2D12: distance-measuring sensor Fairchild QRB1134: phototransistor reflective object sensor HCS12 Steering The vehicle will have front wheel steering, controlled by a servo motor. DC Motor PWM ports on the HCS12 in conjunction with H-Bridges will be used to control the DC motor and the speed of the vehicle. A higher voltage will be supplied to the motor when the vehicle is turning to counteract the effects of added friction, thus maintaining the vehicle’s speed. GP2D12 – IR Analog Distance Sensor The Sharp GP2D12 is a general-purpose type distance-measuring sensor, which consists of a position sensitive detector and an infrared emitting diode and signal processing circuit This sensor has a 2” beam width Distance Sensor Output QRB1134 – Opto-reflector The QRB1134 consists of an infrared emitting diode and an NPN silicon phototransistor. The phototransistor responds to radiation from the emitting diode only when a reflective object passes within its field of view. Datasheet optimum range 4 millimeters Port Diagram Design & User Interface Two buttons are present – – Start Button: this button is toggled to either start the vehicle initially, or to tell it to continue when it is halted at a checkpoint Reset Button: this button is used to reset the vehicle to its start state Two sets of LED’s are present – – The blue LED’s represent the checkpoints that have been reached The Obstacle light is lit when the car sees an obstacle and goes into obstacle avoidance mode, and the Error light is lit if the vehicle finds itself in an unknown state Dimensions & Blind Spots Track Following 4 opto-reflectors will be used for track following. 3 are used for forward navigation, and the 4th is used while navigating backwards. Using 3 sensors allows for quick error detection and correction, as well as efficient turning. Obstacle Avoidance Obstacle Avoidance Algorithm Move forward No Obstacle Detected Yes Clear on Right Turn car until right side sensor sees the obstacle at 12” Yes No Yes Turn car until left side sensor sees the obstacle at 12” Clear on Left Move Forward Move Forward Turn Car Left yes Back up Distance < 9” Distance < 9” no Turn Car Right yes No Distance > 15” yes Turn Car Right no no Distance > 15” yes Turn Car Left Checkpoints Checkpoints will be denoted by a special pattern in the tape that will be recognized when the vehicle travels over it. The vehicle will halt at each checkpoint until it receives the user prompt to continue. An LED will be lit (and remain lit) at each checkpoint, so that at the end of the course, it can be seen how many of the checkpoints were reached. Track Patterns Sample Track Layout Power Consumption Due to lengthy power-up times of the sensors (especially the distance sensors), all sensors will be powered constantly Component Current (mA) Voltage (V) Power (W) HCS12 45 5 .225 Servo Motor 500 5 2.5 DC Motor 1000 9.6 9.6 Opto-Reflectors (4) 35 * 4 = 140 5 .700 IR Distance Sensors (6) 35 * 6 = 210 5 1.05 IC’s/LED’s ? ? ? Total 1895 + 14.075 + Testing Strategy Test each sensor for performance Code review for each major software component Component testing after SW/HW integration System testing Testing Strategy (cont’d) Test vehicle on various track setups Test vehicle under varying light conditions Test various types of obstacles (shapes) Run many iterations of tests to work out performance bugs Difficulties Algorithm to allow vehicle to realign itself with the track after avoiding an obstacle Reverse navigation Progress Project Milestone Expected Completion Date Design Review Preparation 12-7-2004 Buy and test all other needed components 12-12-2004 Have the vehicle built 1-3-2005 Have the code written and tested as much as possible without being interfaced with the car Website Development 1-3-2005 The car can successfully navigate an obstacle free path and recognize stations The car can navigate the path and avoid standard obstacles that does not require backing up The car can navigate the path and avoid all obstacles including backing up to avoid them Testing 1-13-2005 Report Written 2-8-2005 Completed Website 2-8-2005 Poster Completed 2-10-2005 2-8-2005 1-20-2005 1-27-2005 2-8-2005 Cost Part Actual Cost Our Cost Vendor Vehicle $43.29 $43.29 Toys R’ Us Colored LEDs ( many ) $10.00 $10.00 Digi-Key Distance sensors (7) $70.00 $70.00 Online Vendor Opto-reflectors (6) $40.00 $40 Fairchild Battery Pack (5V) $15.00 $0 Toys R’ Us Battery Charger $10.00 $0 Toys R’ Us HC12 $100.00 $0 CE Department Servo Motor $5.00 $0 CE Department Reflective tape (2) $5.00 $5.00 Lowe’s IC’s $5.00 $5.00 CE Department Voltage Regulators(4) $4.00 $4.00 Radio Shack Steering Components $30.00 $30.00 Miscellaneous Circuit Components $50.00 $50.00 Dan’s Crafts and Things Radio Shack Miscellaneous $25.00 $25.00 Lowe’s Total $412.29 $282.29 Questions?