Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
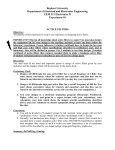
Buck converter wikipedia , lookup
Linear time-invariant theory wikipedia , lookup
Chirp spectrum wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Ringing artifacts wikipedia , lookup
Zobel network wikipedia , lookup
Mechanical filter wikipedia , lookup
Rectiverter wikipedia , lookup
Audio crossover wikipedia , lookup
Opto-isolator wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
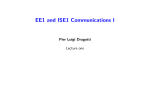
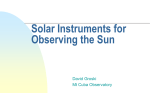
Analog Filters: Introduction Franco Maloberti Historical Evolution 1920 Passive LC 1969 Discrete RC 1980 1973 Thin Film 1975 TF-DIL SWITCHED CAPACITORS DIGITAL SIGNAL PROCESSOR Franco Maloberti Analog Filters: Introduction 2 Frequency and Size 10 GHz RF MONO 1GHz RF MONO & SC 100MHz 10 MHz 1 MHz PASSIVE LC THIN FILM 100 KHz 10 KHz SC DISCRETE RC 1920 1940 1960 1980 2000 2020 Active filters will achieve ten of GHz in monolitic form Franco Maloberti Analog Filters: Introduction 3 Introduction An analog filter is the interconnection of components (resistors, capacitors, inductors, active devices) It has one input (excitation) and one input (response) Input Output Analog Filter x(t) y(t) It determines a frequency selective transmission. Franco Maloberti Analog Filters: Introduction 4 Classification of Systems Time-Invariant and Time-Varying The shape of the response does not depends on the time of application of the input x(t) y(t) x(t ) y(t ) Casual System The response cannot precede the excitation Franco Maloberti Analog Filters: Introduction 5 Classification of Systems Linear and Non-linear A system is linear if it satisfies the principle of superposition f x f x1 x 2 f x1 f x 2 Continuous and Discrete-time In a continuous-time or continuous analog system the variables change continuously with time x x(t); y y(t) In discrete-time or sampled-data systems the variables change at only discrete instants of time Franco Maloberti x x(kT);y y(kT) Analog Filters: Introduction 6 Linear Continuous Time-Invariant If a system is composed by lumped elements (and active devices) Linear differential equations, constant coefficients dn y d n1 y bn n bn1 n1 dt dt dm x d m1 x b0 y am m am1 m1 dt dt a0 x x(t), input, and y(t), output,are current and/or voltages For a given input and initial conditions the output is completely determined Franco Maloberti Analog Filters: Introduction 7 Responses of a linear system Zero-input response Is the response obtained when all the inputs are zero. Depends on the initial charges of capacitors and initial flux of inductors Zero-state response Is the response obtained with zero initial conditions The complete response will be a combination of zero-input and zero-state. Franco Maloberti Analog Filters: Introduction 8 Frequency-domain Study Remember that the Laplace transform of d n y(t) n dy(0) L n s Y(s) sn1 y(0) sn2 dt dt The equation dn y d n1 y bn n bn1 n1 dt dt dm x d m1 x b0 y am m am1 m1 dt dt a0 x Becomes (bn sn bn1sn1 d n1 y(0) dt n1 b0 )Y(s) ICy (s) (am sm am1sm1 a0 )X(s) ICx (s) ICy(s) and ICx(s) accounts for initial conditions Franco Maloberti Analog Filters: Introduction 9 Transfer Function If X(s) is the input and Y(s) the zero-state output Y s am sm am1sm1 a0 H s X s bn sn bn1sn1 b0 Input voltage, output voltage: voltage TF Inpur current, output current: Current TF Input votage output current: Transfer impedance Input current, ourput voltage: Trasnsfer admittance Franco Maloberti Analog Filters: Introduction 10 Transfer Function Input and output ar normally either voltage or current Y (s) H(s) X(s) Where Y(s) and X(s) are the Laplace transforms of y(t) and x(t) respectively. In the frequency domain the focus is directed toward Magnitude and/or Phase on the j axis of s H(s) s j H( j)e j ( ) Franco Maloberti Analog Filters: Introduction 11 Magnitude and Phase Magnitude is often expressed in dB H( j) dB 20log H( j) Important is also the group delay d ( ) Td () d When both magnitude and phase are important the magnitude response is realized first. Then, an additional circuit, the delay equalizer, improves the delay function. Franco Maloberti Analog Filters: Introduction 12 Real Transfer Function The coefficients of the TF are real for a linear, time-invariant lumped network. N s am (s z1)(s z2 ) (s zm ) H s Ds bn (s p1 )(s p2 ) (s pn ) Only real or conjugate pairs of complex poles For stability the zeros of D(s) in the half left plane D(s) is a Hurwitz polynomial Franco Maloberti Analog Filters: Introduction 13 Minimum Phase Filters When the zeros of N(s) lie on or to the left of the j-axis H(s) is a minimum phase function. H j 1 1 1 2 2 ( j z1)( j z2 ) ( j p1)( j p2 ) 2 1 2 1 2 1 2 1 2 Franco Maloberti Analog Filters: Introduction 14 Type of Filters Low-pass 1 High-pass 0 Band-pass f fc 1 f Band-Reject All-Pass Franco Maloberti fc 1 fc1 fc2 0 1 f 0 0 1 0 f fc fc2 f Analog Filters: Introduction 15 Approximate Response Pass-band ripple p=20Log[Amax/Amin] Stop-band attenuation, Asb Transition-band ratio p, s Amax Amin Asb p s Franco Maloberti Analog Filters: Introduction 16 MATLAB Works with matrices (real, complex or symbolic) Multiply two polinomials f1(s)=5s3+4s2+2s +1; f2(s)=3s2+5 clear all; f1=[5 4 2 1]; f2 = [3 0 5]; f3 = conv(f1, f2) 15 12 31 23 10 5 f3(s)=15s5+12s4+ 31s3 + 23s2 + 10s +5 Franco Maloberti Analog Filters: Introduction 17 Frequency Scaling If every inductance and every capacitance of a network is divided by the frequency scaling factor kf, then the network function H(s) becomes H(s/kf). Xc=1/sC; X’c=1/[s(C/kf)]=1/[C(s/kf)] XL=sL; X’L=s(L/kf)=L(s/kf) What occurs at ’ in the original network now will occur at kf ’. Franco Maloberti Analog Filters: Introduction 18 Impedance Scaling All elements with resistance dimension are multiplied by kz R -> kz R; L ->kzL; (Vx=Icont) -> kz All elements with capacitance dimension are divided by kz G -> G/kz; C ->C /kz; (Ix=Vcont) -> /kz Impedences multiplied by kz Admittances divided by kz Dimensionless variables unchanged Franco Maloberti Analog Filters: Introduction 19 Normalization and Denormalization Normalized filters use the key angular frequency of the filter (p in a low-pass, …) equal to 1. One of the resistance of the filter is set to 1 or One capacitor of the filter is set to 1 Frequency scaling and impedance scaling are eventually performed at the end of the design process Franco Maloberti Analog Filters: Introduction 20 Design of Filters Procedure Specifications Kind of network Mask of the filter Input network Infinite, zero load Single terminated/Double terminated Magnitude response Delay response Other features Cost, volume, power consumption, temperature drift, aging, … Franco Maloberti Analog Filters: Introduction 21 Design of Filters Procedure (ii) Normalization Set the value of one key component to 1 Set the value of one key frequency to 1 Approximation To find the transfer function that satisfy the (normalized) amplitude specifications (and, when required, the delay specification. Many transfer functions achieve the goal. The key task is to select the “cheapest” one Franco Maloberti Analog Filters: Introduction 22 Design of Filters Procedure (iii) Network Synthesis (Realization) To find a network that realizes the transfer function Many networks achieve the same transfer function Active or passive implementation The behavior of networks implementing the same transfer function can be different (sensitivity, cost, … Denormalization Impedance scaling Frequency scaling Frequency transformation Franco Maloberti Analog Filters: Introduction 23