Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Birthday problem wikipedia , lookup
Computational complexity theory wikipedia , lookup
Theoretical ecology wikipedia , lookup
Simulated annealing wikipedia , lookup
Mathematical optimization wikipedia , lookup
Graph coloring wikipedia , lookup
Post-quantum cryptography wikipedia , lookup
Signal-flow graph wikipedia , lookup
Travelling salesman problem wikipedia , lookup
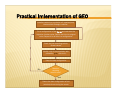
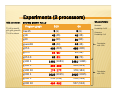
MULTIPROCESSOR TASK SCHEDULING BASED ON GEO METAHEURISTIC Piotr Switalski, Franciszek Seredynski Polish-Japanese Institute of Information Technology and Polish Academy of Science Motivations ´ ´ ´ ´ At the end of last century Nature inspired metaheuristics became a popular tool to deliver nearoptimal solutions to NP-hard problems, in particular, to multiprocessor scheduling problem Today near everybody has an experience in using GA, SA, tabu search, ant colonies, swarm algorithms, etc. Process of searching for new effective metahuristics is continued Any new efficient metaheuristics at the beginning of XXI century ? Plan of presentation New metaheuristics: short overview ´ The idea of GEO algorithm ´ Multiprocessor scheduling problem (MSP) ´ Solving MSP with GEO ´ Experimental results ´ Conclusions ´ New metaheuristics: short overview GEP: Gen Expression Programming (Ferreira, 1999, 2001) ´ Hyperheuristics (Ross et al., 2003) ´ GEO: Generalized Extremal Optimization (Sousa & Ramos, 2002) ´ Genotype and phenotype ´ Genotype – genetic makeup of an organism « what is inherited ´ Phenotype – visible or measurable characteristics of an organism ´ ´ Genotype and phenotype in Evolutionary Computation Phenotype - a collection of parameters of a desired solution (solution space). Genotype - coded version of parameters of a corresponding phenotype from solution space Genetic Algorithms (GA) and Genetic Programming (GP) Genetic Algorithms 0 1 0 1 0 1 Genetic Programming solutions’ coding log sin stochastic selection * x crossover mutation π f ( x) = log( x) − sin(π * x) x Drawbacks of GA and GP ´ Linear chromosomes in GA play role of simple replicators, i.e, they serve simultaneosly as genotype and phenotype « « ´ they are both the object of selection and the guardians of genetic information which is replicated and passed with modifications to next generations The role of replicators is limited, e.g. it is not possible to use only a particular region of a replicator as a solution Nonlinear structures of GP offer richer representations but also suffer from genotype/phenotype duality and they can be considered as more complex replicators « « Evolutionary processing these replicators is highly constrained by parsing trees the work of some highly efficient operators (point mutation, transposition, inversion,...) may lead to syntactically incorrect structures GEP: Gen Expression Programming (GA and GP – predecessors of GEP) ´ for the algebraic expression: ´ corresponding expression tree (ET) – the phenotype of GEP chromosoms a −d b+c y genotype (ORF or K-expression) inferred from the phenotype / d Q a + b c 01234567 -/daQ+bc Hyperheuristics: intelligent combing (e.g. with GA) a set of heuristics to solve a problem ´ Algorithm: 1. P H(I) I 2. 3. P’ 4. Initialize problem P Initilize a set H of heuristics for state I of the solution find appropriate solution H(I); Modify the problem (P:=P’) if problem P is solved then stop else go to 3 GEO: Generalized Extremal Optimization Evolutionary biology: Punctuated Equlibrium Theory (paleontologists: Elredg & Gould, 1972) ´ Bak & Sneppen model (1993) to show the phenomena of punctuated equlibrium ´ Extremal optimization (EO) (Boetcher & Percus, 2001) and Generalized Extremal Optimization (GEO) (Sousa & Ramos, 2002) ´ Punctuated Equlibrium ´ ´ It states that most sexually reproducing populations experience little change for most of their geological history, and that when phenotypic evolution does occurs (criticality point), it is localized in rare, rapid events of branching speciations It is comonly contrasted against the theory of phyletic gradualism, which states that evolution generally occurs uniformly, smoothly and continously Back & Sneppen model ´ a simple coevolutionary model of an ecosystem: e1e2e3e4e5e6e7e8e9e10e11e12e13e14 N species are placed by side on a line with periodic boundary conditions « A fitness number with uniform distribution in the range [0,1] is randomly assigned to each species « The least adapted species is then forced to mutate (and nearest neihgbours), and a new random value of fitness is assigned « Change the fitness of the least adapted species alters the fitness landscape of neighborhood => appearence of crashes (avalanches) Consequence of avalanches: punctuated equlibrium behavior: species usually experiences a large period of stability before ‘bursts’ of evolutionary activity « ´ GEO Algorithm F ( x1 , x2 , …, xn ) − function to be optimized ΔFi = Fi − Fbest ki = f ( ΔFi ) = [1, n] (rank of i - th bit) pi (ki ) = probability of mutation of i - th bit pi = ki−τ τ → 0 (random walk) τ → ∞ (deterministic search) F ( x1 , x2 ) ki 1 0 0 1 1 0 1 0 1 0 1 1 1 0 i x1 x2 e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11 e12 e13 e14 Bak & Sneppen model Practical imlementation of GEO Initialize randomly a population of L species (bits) that encodes N design variables. For a configuration of bits flip bit and calculate the objective function value. Return the bit to its original value. Repeat it for all bits in a configuration. Rank the bits according to their fitness values. Modify a bit of the population with probability pi=ki-τ with k=1,L Keep the new configuration No Was the stopping criterion met? Yes Return the best configuration of bits (solution) found during the search 2 5 5 Multiprocessor scheduling problem tt1 1 3 tt2 2 3 P P11 P P22 P P33 P P44 tt3 3 1 5 1 Fig. 1. Examples of a precedence task graph (a) and a system graph (b). tt4 4 a) b) Multiprocessor system: undirected, unweighted graph Gs=(Vs,Es), called a system graph. Parallel program: weighted, directed, acyclic graph GP=<VP,EP>, called a precedence task graph or a program graph. The purpose of the scheduling is to distribute the tasks among the processors in such a way that the precedence constraints are preserved and the response time T (the total execution time) is minimized. T = f (allocation, scheduling_policy = const) 16 Representation of the individual in GEO ´ The population consists of one binary string. The number of bits in the string is equal to: N t * l bits processor where: Nt - a number of tasks in a program graph, l bits processor - a number of bits used to code a processor number. task # 2 task # 1 1 0 1 0 0 task # 3 1 1 1 0 Each Each task task is is assigned assigned to to a a processor processor represented represented by by three three bits bits in in this this example. example. Tau parameter Program graph: g100_1 System graph: FULL4 τ = 0.5 τ = 2.5 Influence of tau parameter g200_1, FULL4 gauss18, FULL4 207 tasks The best results for τ = 1.5 – 3.0 18 tasks The best results for τ = 1.0 – 1.5 Experiments (2 processors) GEO parameter: τ=1.5 for tree15, g18, g40, gauss18 τ=2.0 for others GA parameters: SYSTEM GRAPH: FULL2 Program graph GEO GA 9 (9) 9 (9) g18 46 (46) 46 (46) g40 80 (80) 80 (80) gauss18 44 (44) 44 (46) g25 1 495 (495) 495 (495) g25 5 94 (95) 99 (99) g25 10 62 (62) 62 (70) g100 1 1481 (1481) 1481 (1481) g100 5 395 (398) 404 (419) g100 10 174 (177) 178 (182) g200 1 3025 (3025) 3025 (3025) g200 5 558 (558) 558 (568) g200 10 484 (492) 507 (516) tree15 Mutation Probability: 0.03 Crossover Probability: 0.9 Population size: 200 Population size: 300 Experiments (4 & 8 processors) SYSTEM GRAPH: FULL4 FULL8 GA parameters: Mutation Probability: 0.03 Crossover Probability: 0.9 Population size: 200 Population size: 300 GEO parameter: τ=1.5 for tree15, g18, g40, gauss18 τ=2.5 for others Conclusions GEO metaheuristic based on Punctuated Equlibrium Theory was presented ´ GEO was applied to solve multiprocessor scheduling problem; results were compared with ones obtained with use of GA ´ Preliminary results are encouraging ´ « GEO is much simpler and more effective than GA « more deeply study of potentials of GEO is currently performed THANK YOU!