Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
History of electric power transmission wikipedia , lookup
Mains electricity wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power over Ethernet wikipedia , lookup
Utility frequency wikipedia , lookup
Alternating current wikipedia , lookup
Electric machine wikipedia , lookup
Electrification wikipedia , lookup
Electric power system wikipedia , lookup
Power engineering wikipedia , lookup
Distributed generation wikipedia , lookup
Life-cycle greenhouse-gas emissions of energy sources wikipedia , lookup
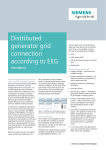
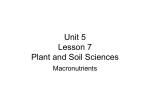
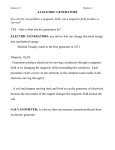
Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 A Power System Stabilizer for Variable-Speed Wind Generators Georgios Tsourakis ∗ Sotirios Nanou ∗ Costas Vournas ∗ ∗ National Technical University of Athens, School of Electrical and Computer Engineering, Zografou Campus, 15780 Athens, Greece (e-mail: [email protected], [email protected]). Abstract: This paper focuses on the application of a special controller that can introduce damping to interarea oscillations of electric power systems by modulating the active power output of wind generators and can thus replace power system stabilizers of conventional synchronous generator units. The controller is tested for Doubly Fed Asynchronous Generators, as well as for Full Converter Wind Generators, on a simplified interconnected system and on an autonomous four-generator, two-area system traditionally used for interarea oscillation analysis and is shown to perform efficiently without significant adverse side effects. Keywords: Power-system stabilizers, renewable energy systems. 1. INTRODUCTION gear box Wind power penetration is continuously increasing in many power systems around the world in an effort to increase renewable energy penetration in the energy mix with cost-effective solutions. In new wind power installations mostly variable-speed wind turbines with frequency converters are used, instead of the older constant-speed, squirrel-cage induction generators. The doubly fed asynchronous generator (DFAG, also known as DFIG: doubly fed induction generator) is today the most popular scheme for variable-speed wind turbines, followed by the full converter concept (see Fig. 1). stator rotor AC stator DC rotor side converter The advanced control capabilities of modern wind generators have been already used in the literature to enhance network damping via auxiliary power system stabilizer Copyright by the International Federation of Automatic Control (IFAC) AC grid side converter (a) Doubly Fed Asynchronous Generator Increased wind power penetration causes reasonable concerns as to possible stability threats that might be encountered, when a large percentage of system load is supplied by new technology wind generators. One particular aspect of system stability is the electromechanical oscillations damping. Electromechanical oscillations stem from the synchronous operation of interconnected synchronous machines, i.e. basically the large synchronous generators of thermal power plants. A mechanical analog of synchronous generators operating in synchronism is masses interconnected with springs. In steady-state all generators rotate at exactly the same speed (masses are at equilibrium), producing the necessary power to cover the system load. As interconnections expand and are more and more stressed due to increased transactions, power system interarea oscillations can become a critical issue. Interarea oscillation modes are associated with the swinging of many machines in one part of the system against machines in other parts (Kundur (1994)). In this paper the oscillation damping contribution of a simple controller added to variable-speed wind generators is examined. DC stator rotor AC DC stator DC generator side converter AC grid side converter (b) Full Converter Wind Generator Fig. 1. Popular wind generation schemes (PSS) loops, e.g. Hughes et al. (2006); Miao et al. (2009). In Ledesma and Gallardo (2007) the fast active power control of variable-speed wind turbines is utilized to provide network damping. A similar simple controller, which was introduced in Tsourakis et al. (2009b), is used in this paper to provide damping to interarea oscillations. This type of controller has been also proposed to provide equivalent inertia to the system, for example in Ekanayake 11713 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 and Jenkins (2004); Lalor et al. (2005); Rodriguez-Bobada et al. (2008). + Tm = Pωm t + + - 2. DFAG MODEL The DFAG model is a variant of the generic type 3 wind generator model used by the WECC, see WECC (2006); Piwko et al. (2009), also included in the PSS/E software (PSS/E (2009)). ′′ ′′ 1 1+sTcon Pord Ipmax ÷ Eq IP cmd 1 Xeq xy ↓ dq dq ↓ xy IP =iq Iˆ + Te = ωPg - 1 2Hg s - ∆θm Ktg ωg Fig. 3. Two-mass drive-train model 3. FCWG MODEL A generic model of a full-converter wind generator (FCWG) that represents the dynamics of relevance for power system stability analysis is used. The modelling approach follows Pourbeik et al. (2007), where simplified control loops are assumed. The electrical behavior of the FCWG as seen from the network is modeled as a controlled current source dependent on voltage. Fig. 4 shows the model block diagram. Vref V V̂ V θ id 1 1+sTcon 2 ωb p s Dtg A DFAG model with detailed control loops originally developed in Miller et al. (2003) and described in Appendix B of Pourbeik et al. (2007) is used in this paper. This model has been redeveloped for the Matlab/Simulinkbased educational tool described in Vournas et al. (2004) and used for teaching and research in NTUA and the University of Liege. Eqcmd ωt 1 2Ht s vd vq θpll θ̇max Kpll θ̇min KpQ Vmeas 1 s + 1 1+sTr jXeq 1 1+s0.01 Qmax + Qord Qmax - KiQ s + Qmin Qmin tanφref X ωg ∆ωwpss Pord MP P T Fig. 2. Generator/converter model θ Figure 2 shows a block-diagram illustrating the modeling of the generator and converter as a controlled current source. Xeq is the equivalent Norton reactance introduced. The phase locked loop (PLL), used for machine vector control, is explicitly modeled. The PLL aligns the current control dq reference frame to the terminal voltage and, thus, allows for independent control of active and reactive ′′ power. Eq is an equivalent voltage that controls the DFAG reactive current injection and comes from the reactive power controller (not shown here). The active power reference Pord comes from the rotor speed controller (shown in Fig. 5). Fig. 4. Generic full converter WG model As the rotor-side converter drives the rotor current very fast, the rotor flux dynamics are neglected. Nevertheless, the model includes two small time constants (Tcon in Fig. 2 is of the order of 20 ms) to represent lags in the corresponding control loops. Figure 2 also depicts the signal that will be used as input to the proposed Wind PSS (with dashed line) which will be described in Section 4. As in the DFAG case, first order transfer functions with a typical 20 ms time constant (Tcon ) to represent lags in measurements and converter action are used. Note that these lags also simplify the simulation as the current injections become state variables and are, thus, decoupled from the terminal voltage. The two-mass drive-train model of Fig. 3 is used in order to represent shaft torsional oscillations. The DFAG rotor speed is noted as ωg and the wind turbine rotor speed as ωt . The DFAG model includes also submodels not repeated here: wind turbine model, pitch controller and reactive power controller. The latter has been discussed in detail in Tsourakis et al. (2009a). In particular the pitch controller is not considered in this paper, as the operating point considered is below rated power. The active power command Pord is determined by the maximum power point tracking strategy, based on rotor speed measurement, while the reactive power command Qord is dictated either for power factor or for voltage control. The full converter wind generator model is completed with submodels not repeated here: wind turbine model and pitch controller. It is assumed that a multi-pole generator is used and the gear box is omitted. Therefore, all rotating masses are mounted on the same short shaft and, thus, a Qord ÷ IQ current limiter Iˆc V Pord & IP ÷ V θ 1 1+sTcon Iˆtot dq ↓ xy V 11714 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 one-mass model is used for the mechanical part, instead of the two-mass model of Fig. 3. 3 SG 4. WIND PSS 5 The proposed controller is shown with dashed line in Fig. 5 with the block-diagram of the doubly fed wind generator speed control loop. The rate of change of the PLL angle is used to obtain the input signal (equivalent to the DFAG bus frequency), taking into account a small measurement delay (Fig. 2). The controller uses a simple wash-out filter with time constant Tw , so that the power setpoint is not affected in steady state. 1 2 4 8 ∞ 6 7 WG PL6 PL4 Fig. 6. Small interconnected system. (2004); Lalor et al. (2005). Note that the controller has to be fit in each individual wind generator of a wind power plant. ωg P ωref 1 1+sTw torque control ωerr Kptrq + - + 5. APPLICATION TO A SIMPLIFIED INTERCONNECTED SYSTEM ωerr MP P T Tmax ωg 5.1 Test system description Pmax &Ṗmax Pmax + Kitrq s X 1 1+sTpc Tmin Pord Pmin Pmin &Ṗmin ∆ωwpss Kwpss sTw 1+sTw ∆Pwpss Fig. 5. DFAG speed control with Wind PSS In the FCWG model (see Fig. 4) a simpler controller is used, but the Wind PSS is added in a similar way as in the DFAG. In this case a PLL model, like the one used in the DFAG model, is added to obtain a measurement of the bus frequency. The Wind PSS was introduced in Tsourakis et al. (2009b) and its basic concept is to superimpose on the wind generator active power production an oscillation in antiphase with the wind generator bus frequency. This active power oscillation has a net damping effect introduced to the nearby synchronous generators. Indeed, assuming that the wind power plant and the nearby synchronous generators belong in the same area and thus oscillate in phase against the external system, when the active power injected by the wind generators decreases for a frequency increase, the synchronous generator power will increase to cover the load and thus its rotor acceleration will be decreased introducing essentially a damping torque. Note that the proposed controller is based on simple physical considerations and does not require the design of special lead/lag compensators as in Hughes et al. (2006); Mendonça and Lopes (2007); Martinez et al. (2009); Fernández et al. (2010). So the concept of the Wind PSS is simple and based on: In this section the Wind PSS is applied in a small interconnected system. The one-line diagram of the test system is drawn in Fig. 6. A conventional power plant is interconnected through a step-up transformer and two parallel High Voltage (HV) lines to an infinite bus representing a large interconnection. The synchronous generator of the conventional power plant is represented by a fourth order model. Constant mechanical power input is assumed. An IEEE type DC1A excitation system model is used, without considering saturation effects.The loads of buses 4 and 6 are modeled as constant admittances. A wind farm (WF) equipped with variable speed wind generators is connected to HV bus 4. The WF is represented by a single wind generator and step-up transformer and is connected to the HV system via a Medium Voltage (MV) line and an MV/HV substation transformer. The equivalent wind generator is assumed to operate with unity power factor. At the considered operating point, the conventional power plant produces its nominal power, which is 380 MW and the wind farm produces 45 MW (88% on its rated MW). This system is scalable and can represent the equivalent of one area of a large system by properly selecting base power values. 5.2 Wind farm with DFAGs Without stabilizing action the electromechanical oscillation (interarea mode) of the test system is marginally stable as seen in Table 1. The Wind PSS washout filter is designed to be active for frequencies as low as 0.1 Hz, so the time constant Tw is taken equal to 20 s. With Tw = 20 s, the Wind PSS adds zero phase at the frequency of the electromechanical oscillation and, thus, contributes a damping torque as explained in Section 4. • The capability of modern wind generators for fast control of their power injection by use of power electronics converters; • The inertia of the wind turbine rotor that can provide a zero mean oscillating power without significantly affecting rotor speed and mechanical power. Adding the Wind PSS to the equivalent DFAG and increasing gradually its gain (from 0 to 1), we plot the root locus of Fig. 7, where we can observe the movement of the system dominant eigenvalues (only the upper half of the complex plane is shown). This type of controller also provides equivalent inertia to the system, as pointed out in Ekanayake and Jenkins As can be seen, the interarea mode damping increases considerably by applying the Wind PSS. At the same 11715 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 50.15 14 SG rotor speed (Hz) 50.1 12 50 49.95 49.9 10 imag 50.05 DFAG shaft mode 49.85 0 SG electromechanical mode 8 2 4 6 8 10 12 14 16 18 20 70 No Wind PSS With Wind PSS 60 WF active power (MW) 6 DFAG VAR control mode 4 50 40 30 −1 −0.8 −0.6 real −0.4 −0.2 0 20 0 2 4 6 8 Fig. 7. Small system root locus for DFAG PSS gain 0-1. Torsional mode Kwpss 0 0.8 Kwpss 0 0.8 Eigenvalue -0.004 ±j4.765 -0.151 ±j4.971 Eigenvalue -1.087 ±j12.51 -0.730 ±j12.27 freq. 0.76 Hz 0.79 Hz freq. 1.99 Hz 1.95 Hz 14 16 18 20 20.1 No Wind PSS With Wind PSS 20.05 20 19.95 19.9 0 damp. 0.09 % 3.03 % damp. 8.65 % 5.94 % 2 4 6 8 10 12 14 16 18 20 2 4 6 8 10 time (s) 12 14 16 18 20 45.15 45.1 WT mechanical power (MW) e/m mode 12 Fig. 8. Synchronous generator rotor speed (upper graph) and WF active power production (lower graph) with and without Wind PSS. WT rotor speed (RPM) time, a decrease of the shaft torsional oscillation mode damping is observed, which may limit the value of the Wind PSS gain. The VAR control mode stems from the DFAG reactive power controller (not discussed in this paper), and as seen is not at all affected by the Wind PSS. From the root locus of Fig. 7, we choose Kwpss =0.8. The corresponding eigenvalues of the electromechanical and torsional modes are shown in Table 1. Table 1. Electromechanical and torsional modes with and without Wind PSS 10 time (s) The decrease of the torsional mode damping is obviously limiting the stabilizer gain. In practice, the application of the Wind PSS needs to be examined also with more detailed models (including the control loop often used in DFAGs to increase the damping of the torsional oscillation mode as in Pourbeik et al. (2007)), whereas the model used in this paper aims to examine the effect of WPSS on bulk power system studies, thus the shaft damping is modeled with a simple damping coefficient. 45 44.95 44.9 44.85 0 Fig. 9. Wind turbine rotor speed (upper graph) and mechanical power (lower graph) with and without Wind PSS. 0.15 No Wind PSS With Wind PSS Figures 8, 9, 10 show simulation results with and without Wind PSS. The simulated disturbance is a three-phase 50 ms self-cleared fault at bus 3 of Fig. 6. We observe that the oscillation introduced by the Wind PSS to the wind farm active power results to an important increase of the electromechanical oscillation damping. Without Wind PSS, the rotor oscillation damping is negligible, while after the Wind PSS introduction, the oscillations practically die out after about 10 s. The amplitude of the wind farm active power oscillation is limited to less than 15 MW, i.e. about 30 % of its power rating. As seen in Fig. 9, the oscillation introduced in the wind turbine rotor speed and mechanical power is of very small amplitude. Finally, Fig. 10 shows the rotational speed difference between the two rotating masses of the DFAG model (with and without Wind PSS). The torsional oscillatory mode, with a frequency of about 2 Hz, can be seen clearly in this response. Even though the damping is 45.05 0.05 g t ω − ω (RPM) 0.1 0 −0.05 −0.1 0 1 2 3 4 5 time (s) 6 7 8 9 10 Fig. 10. Speed difference of the two DFAG model rotating masses decreased because of the stabilizer action, the tortional oscillation still dies out significantly after 5 s, and the Wind PSS effect on the torsional mode is considered acceptable. 11716 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 5 17.5 WT rotor speed (RPM) 4.95 4.9 4.85 imag 4.8 K SG electromechanical mode =0.5 wpss 17.4 17.3 No Wind PSS 17.2 With Wind PSS 17.1 0 4.75 5 10 15 20 5 10 time (s) 15 20 4.7 45.04 WT mechanical power (MW) 4.65 4.6 4.55 4.5 −0.5 −0.4 −0.3 −0.2 −0.1 0 real 45.02 45 44.98 44.96 0 SG rotor speed (Hz) Fig. 11. Small system root locus for FC PSS gain 0-1. Fig. 13. Wind turbine rotor speed (upper graph) and mechanical power (lower graph) with and without Wind PSS. electromechanical oscillation damping, while the resulting oscillation in the wind turbine rotor speed and mechanical power is of very small amplitude (Fig. 13). 50.1 50 49.9 0 5 10 15 20 6. APPLICATION IN A TWO-AREA AUTONOMOUS SYSTEM WF active power (MW) 60 50 6.1 System description 40 No Wind PSS With Wind PSS 30 20 0 5 10 time (s) 15 20 Fig. 12. Synchronous generator rotor speed (upper graph) and WF active power production (lower graph) with and without Wind PSS. 5.3 Wind farms with full-converter units In this section the Wind PSS is applied in a variant of the well-known two-area system, traditionally used for interarea oscillation studies and power system stabilizer tuning, e.g. Kundur (1994); Rogers (2000). An overview of this section’s results has been presented in Tsourakis and Vournas (2010). In this paper the Wind PSS design is presented in detail. The system one-line diagram is shown in Fig. 14. The 1 11 5 Area 1 The same system is examined, but now it is assumed that the wind farm is equipped with full-converter units. Without Wind PSS the interarea mode is again marginally stable as seen in Table 2. Adding the Wind PSS (with Tw =20 s) to the equivalent FCWG and increasing gradually its gain (from 0 to 1), we plot the root locus of Fig. 11 (only upper half plane). In this case there is no shaft torsional mode. From the root locus, we choose Kwpss =0.5. The corresponding eigenvalues of the electromechanical mode are shown in Table 2. Table 2. Electromechanical and mode with and without Wind PSS e/m mode Kwpss 0 0.5 Eigenvalue -0.006 ±j4.667 -0.263 ±j4.837 freq. 0.74 Hz 0.77 Hz 3 Area 2 G1 G3 6 2 7 8 9 10 4 G4 G2 WG 12 13 14 Fig. 14. Two area system damp. 1.38 % 5.43 % Figures 12, 13 show simulation results from this system with and without Wind PSS. The simulated disturbance is the same (three-phase, 50 ms, self-cleared fault at bus 3). Again, the wind farm active power oscillation, introduced by the Wind PSS, results to an important increase of the original system consists of 11 buses and 4 generators separated by the long transmission corridor 7-9 into two areas. In this paper a wind power plant with DFAGs is added to bus 7, represented by a one-machine equivalent, its step-up transformer and a medium voltage line (13-14) to the HV/MV substation. Loads and shunt capacitors are connected to buses 7 and 9, represented as constant admittances. Each synchronous generator is 900 MVA rated and represented by a sixth order model. The AVR is modeled with a measurement filter with time constant Tf in series with a 11717 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 first-order transfer function with gain G and time constant (Te ). A three-stage steam turbine model and governor model are used, following Kundur (1994). At the considered operating point, each conventional plant produces around 700 MW and the wind power plant produces 450 MW. About 400 MW are exported from Area 1 to Area 2. Since there are four synchronous generators, there exist three electromechanical oscillation modes: one interarea (area 1 - area 2) and two local modes (G1 against G2 and G3 against G4). For the operating condition considered, the interarea oscillation mode is marginally unstable. generators in order to add damping to the interarea mode, counteracts the system frequency control. To keep this adverse interaction low, we choose a relatively low value for Tw , so that the corner frequency 1/Tw is located between the frequency of the interarea mode and the frequency of the system frequency control mode, i.e. between 3.5 and 0.5 rad/s. Based on the root locus of Fig. 15, we choose Tw =0.3 s. With a higher value, the benefit in increasing the interarea mode damping is rather minor. At the same time, keeping a low value for Tw gives more room to increase the gain, since the effect on the system frequency control mode is smaller. The system root locus for Tw =0.3 s and Wind PSS gain Kwpss varying from 0 to 0.5 is shown in Fig. 16. We can 6.2 Wind PSS design We assume that a Wind PSS is added to the equivalent generator of the wind farm. In order to choose a value for the Tw time constant, we draw the system root locus for a small value of the Wind PSS gain (Kwpss = 0.1) and Tw values from 0 to 5 in Fig. 15. The eigenvalues of the state matrix without WPSS (Tw =0) are marked with a circle. It can be seen that for all Tw values the interarea 14 12 DFAG shaft ζ=3% ζ=5% 10 G3−G4 imag 8 6 14 G1−G2 interarea 4 12 DFAG shaft ζ=50% 2 10 system frequency control ζ=70.7% 0 G1−G2 & G3−G4 −1 −0.8 −0.6 real −0.4 −0.2 0 imag 8 6 Fig. 16. Root locus for Tw =0.3 s and Kwpss from 0 to 0.5. A 4 interarea B 2 0 see that with a WPSS gain of 0.5 the damping ratio of the interarea mode is more than 5 % (ζ >0.05), while the damping ratio of the system frequency control mode is still above 50 % (ζ >0.50). , but not yet below this limit. At the same time the damping of the DFAG torsional mode has decreased and the damping of the intra-area mode of area 1 (G1-G2) has increased. We thus choose Kwpss =0.5, as this value corresponds to adequate damping of the interarea mode, while further increase of the gain would result to a damping ratio of the system frequency control mode of less than 50 % (ζ < 0.50). system frequency control −1 −0.8 −0.6 −0.4 −0.2 0 0.2 real 3.6 0.6 3.58 ζ=70.7% system frequency control Tw=0.3 3.54 imag imag 0.5 3.56 interarea 0.4 0.3 0.2 3.52 3.5 −0.05 Tw=0.3 DFAG speed control 0.1 0 real 0.05 0 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 real Fig. 15. Root locus for Kwpss =0.1 and Tw from 0 to 5. oscillation eigenvalue moves to the left. There is also a small favorable effect on the intra-area mode of area 1 (G1-G2). Also, similarly to the case of section 5, the DFAG torsional oscillation damping is reduced. It should be noted that the system examined in this Section is autonomous and thus its electrical frequency is varying. Since the governors of the conventional power plants are explicitly modeled, there exists a low-frequency oscillation mode due to the effort to maintain system frequency close to its nominal values (system frequency control mode). As seen, the damping of this mode decreases when the Wind PSS is introduced. This indicates that the active power oscillation introduced by the wind To verify the performance of the Wind PSS, we simulate a 10 % step increase of load admittance at bus 7 for case with (blue continuous line) and without (red dashed line) Wind PSS. Figure 17 shows the simulated responses of one tie-line active power flow and DFAG generation. The disturbance is applied at t=1 s. We can clearly see in the DFAG active power response of Fig. 17b the oscillation introduced by the stabilizer, which results in introducing damping to the interarea oscillation, as shown in the interconnection line power flow response of Fig 17a. The abrupt change of the DFAG active power, right after the load step increase, is due to the instantaneous voltage change caused by the disturbance (since the electromagnetic dynamics are neglected). When the load of bus 7 is increased, the voltage angle of this bus decreases. The DFAG terminal voltage angle also follows this behavior, the PLL angle however still holds its pre-disturbance value, as it is a state variable. This results to the DFAG active 11718 Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 (a) P 7−> 9 (MW) 300 200 100 0 0 5 10 15 20 25 30 (b) P DFAG (MW) 500 No WInd PSS With Wind PSS 480 460 440 420 0 5 10 15 time (s) 20 25 30 Fig. 17. Responses to a 10 % step increase of bus 7 load power increase. The slower frequency control oscillation with a period around 10 s is also evident in Fig. 17. 7. CONCLUSION This paper presented a Wind PSS that can efficiently damp out unstable or marginally stable interarea oscillations as was confirmed by testing on two test systems using two types of wind generators, namely DFAG and FCWG. The resulting oscillations introduced in the rotor speed and the mechanical power of the wind turbine were shown to be very minor. The stabilizing capability of wind generators is very important, because it allows wind farms to contribute the same system stabilization services usually provided by conventional synchronous generators. This is achieved with only a slight modification of the wind generator active power controls that introduce a rather negligible cost. It should be noted that similar controllers are already available by some WG manufacturers with the scope of adding inertia to weak autonomous systems. The only adverse interactions seen in this study were related to the damping decrease of the DFAG shaft torsional oscillation and the interaction with the frequency control mode in autonomous systems. Both these problems were successfully overcome with reasonable effort taken at the controller design stage. The torsional oscillation problem of the DFAG can be further controlled by special devices introduced in the power electronics controls that are not considered in this introductory paper. The FCWGs do not usually need a drive train and are thus not prone to shaft oscillations. REFERENCES Ekanayake, J. and Jenkins, N. (2004). Comparison of the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency. IEEE Trans. on Energy Conversion, 19(4), 800–802. Fernández, R.D., Mantz, R.J., and Battaiotto, P.E. (2010). Wind farm control for stabilisation of electrical networks based on passivity. Int. Journal of Control, 83(1), 105– 114. Hughes, F.M., Anaya-Lara, O., Jenkins, N., and Strbac, G. (2006). A power system stabilizer for dfig-based wind generation. IEEE Trans. on Power Systems, 21(2), 763– 772. Kundur, P. (1994). Power System Stability and Control. McGraw-Hill, New York. Lalor, G., Mullane, A., and O’Malley, M. (2005). Frequency control of wind turbine technologies. IEEE Trans. on Power Systems, 20(4), 1905–1913. Ledesma, P. and Gallardo, C. (2007). Contribution of variable-speed wind farms to damping of power system oscillations. In Proc. of IEEE PowerTech. Lausanne, Switzerland. Martinez, C., Joos, G., and Ooi, B.T. (2009). Power system stabilizers in variable speed wind farms. In Proc. of IEEE PES Gen. Meeting. Calgary, Canada. Mendonça, A. and Lopes, J.A.P. (2007). Simultaneous tuning of power system stabilizers installed in dfigbased wind generation. In Proc. of IEEE PowerTech. Lausanne, Switzerland. Miao, Z., Fan, L., Osborn, D., and Yuvarajan, S. (2009). Control of dfig-based wind generation to improve interarea oscillation damping. IEEE Trans. on Energy Conversion, 24(2), 415–422. Miller, N.W., Sanchez-Gasca, J.J., and Price, W.W. (2003). Dynamic modeling of ge 1.5 and 3.6 mw wind turbine-generators for stability simulations. In Proc. of IEEE PES Gen. Meeting. Toronto, Canada. Piwko, R., Camm, E., Ellis, A., Muljadi, E., Zavadil, R., Walling, R., O’Malley, M., Irwin, G., and Saylors, S. (2009). A whirl of activity. IEEE power & energy magazine, 7(6), 26–35. Pourbeik, P. (convener) et al. (2007). Modeling and dynamic behavior of wind generation as it relates to power system control and dynamic performance. CIGRE Technical Brochure n.328, WG C4.601. PSS/E 31.1 (2009). Wind Model Library. Siemens-PTI. Rodriguez-Bobada, F., Ledesma, P., Martı́nez, S., Coronado, L., and Prieto, E. (2008). Simplified wind generator model for transmission system operator planning studies. In Proc. of 7th Int. Workshop on Large Scale Integration of Wind Power and on Transmission Networks for Offshore Wind Farms. Madrid, Spain. Rogers, G. (2000). Power System Oscillations. Kluwer, Norwell, MA. Tsourakis, G., Nomikos, B.M., and Vournas, C.D. (2009a). Effect of wind parks with doubly fed asynchronous generators on small-signal stability. Electric Power Systems Research, 79(1), 190–200. Tsourakis, G., Nomikos, B.M., and Vournas, C.D. (2009b). Contribution of doubly fed wind generators to oscillation damping. IEEE Trans. on Energy Conversion, 24(3), 783–791. Tsourakis, G. and Vournas, C. (2010). A controller for wind generators to increase damping of power oscillations. In Proc. of IEEE ISCAS. Paris, France. Vournas, C.D., Potamianakis, E.G., Moors, C., and Van Cutsem, T. (2004). An educational simulation tool for power system control and stability. IEEE Trans. on Power Systems, 19(1), 48–55. WECC Wind Generator Modeling Group (2006). Generic Type-3 Wind Turbine-Generator Model for Grid Studies. 11719