Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Operational amplifier wikipedia , lookup
Opto-isolator wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Power MOSFET wikipedia , lookup
Superconductivity wikipedia , lookup
Rectiverter wikipedia , lookup
Thermal runaway wikipedia , lookup
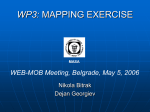
Wien bridge oscillator wikipedia , lookup
1 Problems and Answers 1. Explain the basic control strategy employed in a room airconditioning system. What is the controlled variable? What is the manipulated variable? Soln: The basic strategy of the room air-conditioner can be described as follows: • The room temperature is measured by a "thermostat", which is nothing more than a sensor of temperature. Thus temperature is a controlled variable. • The measured temperature is compared to a set point in the thermostat. Often this is simply a bimetal strip which closes a contact when the temperature exceeds some limit. • If the temperature is too low then the compressor and distribution fan of the air-conditioner are turned on. This causes room air to be circulated though the unit and thereby cooled and exhausted back into the room. Thus, the manipulated or controlling variable is the temperature of the re-circulated air. 2 2. An Resistence-Temperature Detector (RTD) has α 0 = 0.005/ oC , R = 500Ω and a dissipation constant PD = 30mW / oC at 20oC . The RTD is used in a bridge circuit as show in the figure with R1 = R2 = 500Ω and R3 a variable resister used to null the bridge. If the supply is 10 volts and the RTD is placed in a bath of 0oC , find the value of R3 to null the bridge. R1 V R2 c a b D R3 RTD 3 Soln: First we find the value of the RTD resistance at 0 o C without including the effects of dissipation. From the linear approximation relationship between resistance and temperature, we have R(T ) = R(T0 )[1 + α 0 (T − T0 )]Ω = 500[1 + 0.005(0 − 20)]Ω = 450Ω Without the effects of self-heating, we would expect the bridge to null with R3 equal to 450Ω as well. However, self-heating exists. Assuming the RTD resistance is still (an approximation) 450Ω . The current I to three significant figures is found from I= 10 V = = 0.011A ( ) 500 450 R2 + R T + The power is P = I 2 R = 0.0112 * 450 = 0.054W We then get the temperature rise P 0.054 ∆T = = = 1.8o C PD 0.030 Thus, the RTD is not actually at the bath temperature of 0 o C but at a temperature of 1.1o C . As a consequence, the RTD resistance should be R(T ) = R(T0 )[1 + α 0 (T − T0 )]Ω = 500[1 + 0.005(1.8 − 20)]Ω = 454.5Ω Thus, the bridge will be null with R3 = 454.5Ω . The indicated temperature is 1.8o C temperature rise. for the self-heating 4 Using an RTD with α 0 = 0.0034/ oC and R = 100Ω at 3. 20 oC , design a bridge and op amp system to provide a 0.0- to 10.0- volt output for a 20 oC to 100 oC temperature variation. The RTD dissipation constant is 28 mW / oC . Soln: First, we find the resistance of the RTD at the two temperature extremes: R(20 o C ) = 100Ω R(100o C ) = 100[1 + 0.0034(100 − 20)] = 127.2Ω If we use the RTD in a bridge with the rest of the arms at 100Ω , then it is will null at 20 oC . Assuming a 10 volt bridge excitation voltage, we find the offnull voltage at 100 oC as 100 127.2 )10 = −0.599V ∆V = ( − 100 + 100 100 + 127.2 To get the required output of 10 volt, we need a gain of K = 10 / 0.599 = 16.7 The following circuit will provide the result: 5V 100Ω 167kΩ 100Ω 10kΩ Vout 100Ω RTD 10kΩ 167kΩ 5 4. For the industrial process, vapor flows though a chamber containing a liquid at 100 oC . A control system will regulate the vapor temperature. A measurement must be provided to convert 50 oC - 80 oC into 0 - 2.0 volts. The error should not exceed ±1o C . If the liquid level rises to the tip of the transducer, its temperature will rise suddenly to 100 oC . This event should cause an alarm. Temp. Transducer Vapor Out Vapor In 100 o C Heater 6 Soln: This is an example of a midrange temperature measurement. Let us use an RTD because the output over the 30 o C range will be substantially linear. The specifications are: At 65o C , R = 150Ω , α = 0.004/ oC and PD = 30mW / oC The three resistance of interest are at 50 o C , 80 o C and 100 o C . From the linear RTD relationship of resistance and temperature, we have At 50 o C , R = 150[1 + 0.004(50 − 65)]Ω = 141Ω At 80 o C , R = 150[1 + 0.004(80 − 65)]Ω = 159Ω At 100 o C , R = 150[1 + 0.004(100 − 65)]Ω = 171Ω For a 1o C error because of self-heating, we can find the maximum current through the RTD. The maximum power and maximum current are P = PD ∆T = (30mW / oC )(1o C ) = 30mW I = P / R = 30mW / 159Ω = 13.7 mA Although an op-amp could be used, let us place the RTD in a bridge circuit and use the offset voltage for measurement. The small range of resistance will not cause any appreciable nonlinear effects, and the bridge can be nulled at 50 o C , which will simplify the signal conditioning. 7 The bridge is excited from a 5.0 volt source because this value is common. Taking R4 be the RTD, and the value of R2 can be determined by the requirement that the current be below 13.7 mA . The voltage across the RTD at 80 o C will be V = IR = (13.7mA)(159Ω) = 2.17V Therefore, R2 = (5 − 2.17) / 13.7 = 206.5Ω . Let us use 220Ω for R2 , because this is a standard value and will ensure that the current is low and the error condition is satisfied. To null the bridge at 50 o C , we will take R1 = 220Ω and use a trimmer to set R3 = 141Ω . (To check: The actual current flowing in the RTD: 5 At 80 o C , I = = 13.19mA 220 + 159 5 At 50 o C , I = = 13.85mA which is slightly above 220 + 141 the maximum and is regarded as acceptable). Assuming the impedance to be very high, the bridge offset voltages are: 141 * 5 141 * 5 At 50 o C , ∆V = − = 0V 220 + 141 220 + 141 159 * 5 141 * 5 At 80 o C , ∆V = − = 0.1447V 220 + 159 220 + 141 171 * 5 141 * 5 At 100 o C , ∆V = − = 0.2338V 220 + 171 220 + 141 8 To boost the 80 o C voltage to 2.0 volts, the required gain is (2/0.1447)=13.8. Because the 5volt source used is ground referenced, we must use a differential amplifier for the bridge offset voltage. The figure shows the required amplifier with gain. The comparator reference voltage is Vref = 13.8 * 0.2338 = 3.23V 5V 138 Ω 10 k Ω R 2 = 220 Ω R 1 = 220 Ω 10 k Ω V out R 3 = 141 Ω 10 k Ω 10 k Ω R 4 = RTD 5V 548 Ω V ref = 3 . 23 V 1k Ω A la r m C o m p arato r 9 5. As a water tank loses heat, the temperature drops by 2K per minute. When a heater is on, the system gains temperature at 4K per minute. A two position controller has a 0.5 min control lag and a neutral zone of ± 4% of the setpoint about a setpoint of 323K. Plot the heater temperature versus time. Find the oscillation period. Solu.: Setpoint is 323 K, ± 4% neutral zone gives the range of operation as [310, 336] (=[323-323*4%, 323+323*4%] = [323-12.92, 323+12.92]) Let us assume we start at the setpoint value, then the temperature will drop linearly at T1 (t ) = T (t s ) − 2(t − t s ) where t s = time at which we start observation. The heater will start at temperature of 310 K (4% below setpoint), after which the temperature will rise according to T2 (t ) = T (t h ) − 4(t − t h ) where t h = time at which heater goes on. When the temperature reaches 336 K, the heater goes off and the system temperature drops by 2 K/min until 310 K is reached. Because of the control lag = 0.5 min, there is an undershoot of 1-K (2*control lag = 2*0.5= 1), and an overshoot of +2-K (4*control lag = 4*0.5= 2). The system response is then plotted as in the Figure using the two equations. Notice that the period is 21.5 minutes. 10 Temp (K) Upper setpoint t (min) Lower setpoint 11 6. Analog Implementation of: P Control: u = K p e t I Control: u = K I ∫ e(τ )dτ 0 D Control: u = K D de dt Soln: P Control: u = K p e R2 R R1 Ve R Vout Inverter Vout R2 = Ve R1 12 t I Control: u = K I ∫ e(τ )dτ 0 C R R1 R Ve Vout Inverter D Control: u = K D de dt R2 R1 Ve R C R Vout Inverter Resistance R1 is added for stability of the circuit against rapidly changing signals. The value of R1 is determined by a requirement that the derivative action stops or "breaks" at some frequency f c that is higher that any expected signal frequency. Thus, spontaneous oscillation is prevented, but no measurement information is lost. Generally, speaking, we make f c 10 to 100 13 times the maximum expected signal frequency. If f s is the maximum signal frequency, then the requirement can be written 1 R1C << , or 2πR1C << Ts 2πf s How about composite modes? 14 6. What is integrator wind-up? Give at least three possible solutions to the problem.