Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Seismic communication wikipedia , lookup
Shear wave splitting wikipedia , lookup
History of geodesy wikipedia , lookup
Seismic inversion wikipedia , lookup
Plate tectonics wikipedia , lookup
Seismometer wikipedia , lookup
Mantle plume wikipedia , lookup
Oceanic trench wikipedia , lookup
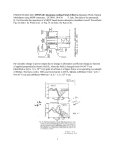
Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Seismic low-velocity layer at the top of subducting slabs: observations, predictions, and systematics Geoffrey A. Abers∗ Department of Earth Sciences, Boston University, 685 Commonwealth Avenue, Boston, MA 02215, USA Received 30 May 2003; received in revised form 24 March 2004; accepted 26 August 2004 Abstract Layered structure persists at the tops of subducting plates to depths in excess of 150 km. A low-velocity channel several km thick produces guided seismic guided waves, which indicate that the top of the downgoing plate remains coherent and probably has not eclogitized to >150 km depth. The surrounding medium has seismic velocities 3–6% faster than standard earth models, as inferred from direct travel times, presumably because the waveguide lies atop cold descending lithosphere. However, guided waves travel more slowly. Several tests with full waveform synthetics show that the guided waves can be observed only if excited by sources that lie near or within the low-velocity channel. Thus, the frequent observation of dispersed body waves indicates that intermediate-depth earthquakes tend to lie in waveguides. Also, receivers must be favorably placed. Observations for seven circum-Pacific subduction zones show such signals, which can be explained as low-velocity channels 2–8 km thick. Velocity anomalies within low-velocity channels are largest at shallowest depths, up to 14% slower than surroundings at depths less than 150 km, diminishing to <3% at greater depths. This variation in depth indicates that low-velocity channels metamorphose at depths that can exceed 150 km to a rock closely resembling eclogite or peridotite. Metamorphism probably involves dehydration of a layer initially abundant in hydrous minerals, although equilibration of variable fractions of metastable gabbro may explain some observations. The size of the low-velocity anomaly correlates with slab dip, with steeply dipping slabs exhibiting the greatest anomalies, but does not correlate with thermal parameter or convergence velocity. This correlation may reflect a greater ability of steep slabs to funnel fluid up the slab rather than into the overlying wedge, so that slow seismic velocities integrate effects of subduction of hydrous materials and their subsequent up-dip fluid transport. At depths exceeding 150 km, the waveguide velocities place an upper bound on the amount of water that could be delivered to deeper mantle, to 2 wt.% or less within this 4 km thick layer. © 2004 Elsevier B.V. All rights reserved. Keywords: Subduction zones; Metamorphism; Seismic low-velocity zones; Body waves; Dispersion; Dehydration 1. Introduction ∗ Tel.: +1 617 353 2616; fax: +1 617 353 3290. E-mail address: [email protected]. 0031-9201/$ – see front matter © 2004 Elsevier B.V. All rights reserved. doi:10.1016/j.pepi.2004.10.002 As oceanic plates subduct, the downgoing crust, sediments, and altered mantle undergo a sequence of phase transformations with increasing pressure and temper- 8 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 ature (e.g., Schmidt and Poli, 1998). Many of these reactions involve dehydration, and control the cycling of volatiles to magmatic arcs and into the deep mantle. However, the depths at which reactions actually occur are poorly known in many cases, as are the extents of dehydration, so the fluid flux to the deep mantle remains almost completely uncertain (Williams and Hemley, 2001). Also, the metamorphism of anhydrous gabbro may be delayed metastably (Hacker, 1996), making the subducted crust buoyant even without water. Fortunately, seismic measurements are beginning to place direct constraints on the structure of sub- ducted plates, and provide in situ bounds on dehydration. A plethora of mode-converted, reflected, and dispersed body wave phases have shown that the upper few kilometers of subducted slabs contain sharp interfaces or layering (e.g., Gubbins et al., 1994; Helffrich, 1996; Helffrich and Stein, 1993; Yuan et al., 2000). Such observations require that oceanic crust remains seismically distinct from surrounding mantle, in most cases at lower seismic velocities. In particular, high-frequency body wave distortion, described as dispersion, indicates that a 2–8 km thick layer that is several percent slower than surrounding Fig. 1. Ray paths sampled, from 3D ray tracing. Three-letter code is station name used, as in Table 1. Triangles: stations, circles: earthquakes. Thick black lines: portion of ray paths inside slabs; gray lines: portion above slabs; dashed lines: contoured depths to slabs, at 50 km intervals; barbed line: trench. G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 9 Table 1 Stations and arcs sampled, and sampling Station Latitude (◦ ) Longitude (◦ ) Arc Number of P waves Number of S waves Ttot a (s) ADK COL(A)b ERM-nc ERM-sc GUMO JTS PET 51.884 64.900 42.015 42.015 13.588 10.291 53.024 −176.684 −147.793 143.157 143.157 144.866 −84.953 158.650 Aleutians Alaska Hokkaido, S Kurile N. Honshu Mariana Nicaragua Kurile-Kamchatka 24 55 28 6 34 19 44 19 38 16 8 22 7 47 552 1406 990 232 985 609 811 a b c Total time spent in slab for all P waves. Station COL moved to COLA in 1996, 4 km to SW; listed coordinates for COL. Data set from ERM split between events north of station (Hokkaido–S. Kuriles) and south (N. Honshu). material exists atop many slabs (Abers, 2000). If these slow zones do indeed represent hydrated rocks, then their seismic velocities constrain the H2 O contents of slabs (Abers et al., 2003; Hacker et al., 2003a). Even if the slow velocities include a contribution from metastable gabbro, the seismic velocities should still place an upper bounds on the degree of in situ hydration. This paper presents a comprehensive review of the body-wave dispersion constraints on waveguide composition (Abers, 2000), emphasizing the variability and limitations of the dispersion data set. Several theoretical and numerical tests show the situations in which dispersion can be expected, and show the ability of current methods to resolve the dispersion. We find that velocity measurements are sufficiently robust to allow their variations to be measured between arcs and with depth, for seven Pacific arc segments (Fig. 1, Table 1). The systematics suggest that the top of oceanic plates progressively convert to eclogite as slab depth increases, but that other effects (such as updip transport of fluids) may control the size and distribution of waveguide anomalies. tial low-frequency signal (Abers, 2000), although signals from Tonga earthquakes recorded in parts of New Zealand show the opposite behavior (Ansell and Gubbins, 1986). The common dispersion can be produced by propagation along a waveguide of constant velocity V and thickness H, surrounded by a faster medium of velocity V0 . Other mechanisms that disperse body waves, such as anelastic attenuation and scattering, do not produce the large effects seen here, often produce the incorrect sign of dispersion, and do not produce the observed high-frequency amplification. To estimate the velocity and thickness of the waveguide, we modify the treatment of Gubbins and Snieder (1991), who calculated the acoustic response of a high-velocity slab (V > V0 ). They solved the acoustic wave equation for a uniform layer bounded by two continuous half spaces, with continuity of vertical displacement and pressure enforced across the two boundaries. The acoustic approximation ignores mode-converted energy, but tests below show that it characterizes well most observations. For a given frequency, a period equation relates frequency ω to phase velocity as: 2. Waveguide analysis √ ωH 1/2 2 γ(1 − γ) 1/2 tan γ = tan Ωγ = V0 D 1 − 2γ (1) 2.1. Acoustic theory (Gubbins and Snieder, 1991). Here, Seismic P and S body waves that travel long distances (100–1000 km) along the tops of slabs appear dispersed (Abers and Sarker, 1996; Gubbins and Snieder, 1991). In most cases, the dispersion shows that high frequencies are delayed with respect to the ini- ωH ωH = Ω= V0 D V0 V02 −1 V2 (2) 10 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 (U) as −1 1 ∂ω v2 dγ U = =v 1− V0 V0 ∂k 2D2 d Fig. 2. Theoretical dispersion for a low-velocity acoustic waveguide with wave speed 90% that of surrounding material. Thick lines: group velocity (U/V0 ); thin lines: phase velocity (ν); both normalized to the velocity V0 of surrounding material. Solid, dashed, and dotted lines show solutions for the fundamental mode, first and second higher modes, respectively. is a nondimensional frequency, and D is a nondimensional reduced velocity of the layer: 1 = D2 V02 V2 − 1. (3) The parameter γ describes a phase velocity v (normalized by V0 ) at frequency ω and wavenumber k: 2 V02 γ 1 2k ≡ V = − 2, 0 2 2 2 v ω V D (4) where 0 < γ < 1 for V/V0 < v < 1. Solutions to (1) are real and modal, √ 1/2 −1 2 γ(1 − γ) Ωγ = − tan + nπ (5) 1 − 2γ for n = 0, ±1, . . .. For tan−1 defined on range {−, 0}, the right-hand side is positive for non-negative n. Low frequencies correspond to small Ωγ −1 in (5) and can be only attained for n = 0 (Fig. 2). Higher modes may be present if Ωγ 1/2 > π, interfering with fundamentalmode signals traveling slowly (γ < ∼0.35). Such signals may increase the overall frequency content of records but do not change the difference between phase velocities at the lowest and highest frequencies. Inversions, described below, use only the fundamental mode (n = 0). To calculate dispersion, Eqs. (4) and (5) are evaluated for v(Ω), which then gives the group velocity (6) evaluated numerically. At high frequencies (Ω 1) and finite n (5) is satisfied if γ 1; i.e. the phase velocity approaches V. At low frequencies (5) is solved if γ → 1 and only for n = 0, such that the phase velocity approaches V0 . In other words, at high frequencies the waves travel at the velocity of the waveguide, while at low frequencies and long wavelengths the waveguide vanishes. For a given velocity contrast, the frequency behavior scales as H/DV0 (Eqs. (2) and (3)). In the observations here D ∼ 0.3–0.6, roughly 1/2. Hence, V0 /H acts as a characteristic frequency for the waveguide, such that signals with ω 2V0 /H travel at V0 , while signals with ω 2V0 /H travel at V. 2.2. Measurement method Individual body waves are extracted along with ∼5 s of pre-arrival noise and 5–15 s of signal, including all of the early-arriving signal but avoiding any strong secondary phases. For S waves the transverse component is used to minimize effects of nearstation mode conversions. Each signal passes through a bank of narrow-band Gaussian filters and the Hilberttransform envelope operator to generate a spectrogram (Dziewonski et al., 1969). Energy is sampled at frequencies fi , at 0.25 Hz intervals from 0.25 to 7.5 Hz, sampled by narrow-band filters of the form exp{−a(f − fi )2 /fin )} where f is the frequency and a and n are constants. Setting n = 1 and a ∼ 4–8 s gives reasonably smooth dispersion curves for the frequencies and time windows analyzed here. Lag times at each frequency are calculated as the arrival time of peak energy from the dispersion curve, after time-frequency windowing (Levshin et al., 1992) to eliminate strong late arrivals or higher modes. The resulting lag times t(fi ) form the basic data set used here. 2.3. Inversion We assume a waveguide of constant thickness but variable velocity with depth, as expected for an anomalous layer undergoing progressive metamorphism. If a signal passes through M waveguide segments each with G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 a constant velocity, then the travel time from event j at frequency fi is the sum of travel times through each segment: Tj + tj (fi ) = M Ljm + ej V0 uim minimizing pred 2 wj τij − τij 11 (10) i,j (7) m=1 here tj (fi ) is the measured group lag at fi , Tj the time taken by a zero-frequency signal to traverse the slab, Ljm the path length taken by ray j through waveguide segment m, uim the group velocity at fi within segment m normalized to V0 , and ej are unmodeled errors in Tj . Equivalently, M 1 tj (fi ) = (8) Tjm − 1 + ej uim m=1 where Tjm is the travel time taken through each slab segment by the zero-frequency ray. Section 4.2 describes estimation of Tjm and potential bias in assuming a planar waveguide. The lags often show systematic shifts for each event (ej ), because they are measured relative to a picked firstarrival onset rather than a zero-frequency group arrival time. As a result, picks can be in error for reasons unrelated to waveguide structure. Such shifts are eliminated by inverting differential lags τij = tj (fi ) − tj (f ) r for some reference time based on the data; here ...r represents an average over a reference frequency band for which signal-to-noise levels are high (3–6 Hz for measured data, fixed at 0.5 Hz for synthetic tests). With this modification, Eq. (8) forms a potentially invertible system of equations for differential group slowness as a function of frequency (1/uim −1). The number of free parameters can be decreased from those in Eq. (8) by directly parameterizing uim = u(fi ; pm ), where parameters become pm = (H/V0 , dlnVm )T , with dln Vm = (Vm − V0 )/V0 and Vm is the velocity within the mth waveguide segment. In this way, only M + 1 parameters need be determined, with {H/V0 , dln V1 , dln V2 , . . ., dln Vm } describing one layer thickness and M velocities. The forward problem can then be stated M 1 1 pred τij = − . (9) Tjm − u(fi ; pm ) u(f ; pm ) r m Eq. (9) is inverted nonlinearly for H/V0 and each dln Vm via the simplex algorithm (Press et al., 1986), weights wj = 1.0, 0.5, 0.25, or 0 are assigned for event quality rankings a–d, respectively, as discussed below, and τ i is fit between 0.25 and 6.0 Hz. Uncertainties are determined from 1000 bootstrap substitutions of individual dispersion measurements to the stacks, and reported as 90% confidence limits. 3. Numerical simulations of waveguide behavior Several numerical tests provide insight into the behavior of the waveguides and the ability of the inversions to recover parameters. These tests simplify the actual propagation geometry primarily by assuming a plane-layered structure, rather than a realistic slab shape, a geometry that allows rapid and stable calculation of responses over wide frequency bands. The tests complement 2D finite-difference tests that have been recently conducted for the Andean slab geometry (Martin et al., 2003), which directly explore the effects of slab curvature. First-order effects of slab shape on dispersion measurements are discussed in Section 4.2. In the tests here, full-waveform seismograms are calculated using a wavenumber integration scheme (Wang and Herrmann, 1980). The calculated signals travel the length of a waveguide for a distance of 200 km, sampled 32 times per second, for a parabolic source-timefunction four samples long. Seismograms are generated for particle motion in the direction of wave propagation (R) and for the three independent double-couple excitation functions (RDD, RSS and RDS in the terminology of Wang and Herrmann). In all simulations, the Poisson’s ratio is 0.25 everywhere and the medium outside the waveguide has a P wave velocity (VP ) of 8.5 km/s. 3.1. Where should waveguide effects be seen? The first calculation examines the response of a simple waveguide of thickness 6 km and Vp = 8.0 km/s. The source lies at the center of the layer and receivers lie at a variety of offsets normal to the 12 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Fig. 3. Full-waveform seismograms calculated for a low-velocity waveguide embedded in a full space. Waveguide is 6 km thick (gray area) with Vp = 8.0 km/s, surrounded by a medium of Vp = 8.5 km/s, and Vp /Vs = 1.73 in both. Source is at center of waveguide. Left: ground motion at 200 km range along the waveguide, at offset from the waveguide center as shown on vertical axis, for RDD Green’s function. Numbers (left, in figure) show relative maximum amplitude. Dotted lines show ray-theoretical arrival times for direct and P–S converted phases. Right shows same seismograms, filtered at a low (<1 Hz) and high (>3 Hz) frequencies (thick and thin lines, respectively). Note dispersion and high amplitudes for sources near the waveguide only. layer (Fig. 3). For receivers aligned along the waveguide or near it, the waveguide produces an initial low-frequency arrival followed by high-frequency secondary arrivals. The waveguide also focuses energy so as to amplify high-frequency signals by 10–20 times. Such amplification may explain the prevalence of dispersed signals in otherwise complex suites of seismograms. Where receivers are offset by tens of km from the low-velocity channel, a distinct secondary phase arrives after P with moveout parallel to S. Neither P nor this secondary phase show dispersion or amplification. Ray tracing shows that this phase is a P-to-S converted signal, traveling as P inside the waveguide and converting to S at the boundary. These phases have been used to map the slab surface and estimate the velocity beneath it (e.g., Helffrich and Abers, 1997; Matsuzawa et al., 1986; Zhao et al., 1997). In a complementary calculation, a receiver is placed in the center of the waveguide and the location of the source varies (Fig. 4). Only those sources lying within or very close to the waveguide generate dispersion. Sources far from the waveguide produce much smaller signals along with a secondary undispersed phase, apparently an S–P converted phase near the source. The observation of dispersed signals indicates that earthquake sources lie within or very close to waveguides. 3.2. Inversion method tests: sources and higher modes The inversions applied to real data (Sections 2 and 4) assume only fundamental-mode acoustic propagation. To test the validity of this approximation, the seismograms calculated in Fig. 4 are inverted with G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 13 Fig. 4. Effect of source location on waveguide excitation for calculated P waves. Same structure and layout as Fig. 3 for geometry shown at top. Receiver lies inside waveguide, and sources are placed at varying distances from waveguide center. Figure shows RSS Green’s function. Amplitudes at left scaled to common level, to illustrate waveguide amplification. Sources inside waveguide (gray region) or within 0.5 times waveguide thickness show dispersion, but sources farther do not. the same procedure as used for actual data. If accurate, these inversions should give d ln Vp = −0.059 and H/V0 = 0.706 s. First, signals are generated with both source and receiver at the waveguide center (Fig. 5). Fig. 5. Dispersion fits for numerical tests. Symbols: lags for fullwaveform calculated seismograms relative to 0.5 Hz; solid circles: dln Vp = −0.5/8.5; triangles: dln Vp = 0. Parameters same as in Fig. 3 with both source and receiver at center of waveguide, RSS component analyzed. Lines show corresponding fits for the acoustic fundamental-mode inversion. The dispersion lags predicted from the inversion, based on acoustic theory, match closely those from the fullwaveform synthetics. The fitting procedure overestimates d ln Vp slightly (−0.067) and underestimates H/V0 (0.581 s). Next, a dispersion curve is calculated and inverted for the same geometry but with no velocity contrast between waveguide and surroundings; as expected, no dispersion is observed or estimated (triangles on Fig. 5). The experiment is repeated for all three source components (RDD, RSS, RSD) and all source locations in Figs. 4 and 6. For sources within 9 km of the waveguide center, velocity estimates are correct usually to within 1% and always within 2%. However, layer thicknesses are biased toward low values, on average 72% of the correct thickness, ranging from 26 to 97%. Any higher-mode excitation will distort the fundamental-mode dispersion curve by adding highfrequency energy, leading to a thinner apparent waveguide. The mismatches are worst for the RDS excitation 14 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 more accurate inversion would require knowing accurately both the event location relative to the waveguide and the focal mechanism, both of which are generally unavailable. Except in the few subduction zones where dense local images of the top of the slab have been obtained (e.g., Ferris et al., 2003; Zhao et al., 1997), the waveguides are only known by their effects on the data shown here. Hence, the offset of the events from the waveguide is not knowable. Because the events are small (Section 4.1), global compilations of focal mechanisms such as the Harvard CMT catalog (Dziewonski et al., 1981) include only 5% of the events studied. 3.3. Effect of a thin sediment-like layer Fig. 6. Results from inverting full-waveform synthetic seismograms for waveguide parameters. Parameters and data same as in Fig. 4. Gray area shows sources inside waveguide. (A) estimated dln Vp ; (B) estimated waveguide thickness H; (C) variance of misfit to time lags (Eq. (10)). Symbols: double-couple excitation modes, RDD (circles), RDS (triangles) and RSS (stars). Dashed lines: correct values within 7 km of LVZ center, dln Vp estimates show no bias but H is underestimated. function, with thickness estimates typically 55% of the correct value. This excitation function has a nodal plane parallel to the waveguide, so generates the observed P waves only through reflection and S–P mode conversion. For sources farther than 9 km from the waveguide center, the inversions give a wide range of incorrect answers and poor fits. Such results indicate that dispersion analysis cannot be conducted blindly. However, it seems unlikely that such errors affect actual data, for two reasons. First, these signals are small and the raw signals do not show dispersion, but show two separate arrivals, so would not be analyzed. Second, in these artificial examples the dispersion is controlled by the timing of secondary S–P phases. The phases should not show moveout with increasing path length, but real data do show such moveout (Section 4.4). In summary, the dispersion inversion can recover velocities to within ∼1–2%, but can lead to significant (∼50%) underestimates of waveguide thickness. A A single-layer waveguide greatly simplifies subducted structure (Hacker et al., 2003a), and it has been suggested that seismically slow metasediments may bias the velocity anomalies estimated (Kerrick and Connolly, 2001). In most arcs, such a layer should be no thicker than 500 m. To estimate its consequences, or that of any thin layer (e.g., a fluidrich channel, shear zone, talc, serpentine), seismograms are modeled for a structure which adds a 500 m thick layer of Vp = 7.0 km/s above that described above (Fig. 7). The resulting dispersion curve shows slightly increased group delay at frequencies above 3.5 Hz (Fig. 7), and its shape is still controlled by the thicker layer (crust). Inversions of these dispersion curves give dln V = −0.067, similar to that obtained when a sediment layer is absent. A thin layer alone, without underlying crust, produces a dramat- Fig. 7. Dispersion fits for numerical tests that include a 0.5 km thick metasediment layer (sed), either with or without 6 km of underlying crust. Layout and parameters same as Fig. 5. Addition of sediment to crust shows little effect. G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 ically different dispersion curve than that actually observed. 3.4. Differences between calculated and actual propagation geometry Dispersed signals can be recorded at the Earth’s surface, outside the slab, so some trapped energy must be able to leak out. Typically these signals are seen along paths where energy travels parallel to slab strike and along the slab surface for >100 km. Slabs are curved, which may make it easier for dispersed signals to leak out (Martin et al., 2003), as may rough boundaries. Finite-difference simulations of guided waves in fault zones support this inference (Igel et al., 1997; Li and Vidale, 1996). The simulations show that waveguides need not be continuous over the entire path to the observing station, just that the station must be favorably placed with respect to where energy emerges from the waveguide. They also show that waveguide bending over distances much longer than waveguide thickness has relatively little effect on propagation, but that offsets or heterogeneities that are sharp compared with thickness can severely disrupt propagation (Igel et al., 1997; Li and Vidale, 1996). 4. Observations 4.1. Signals and events Several Global Seismic Network (GSN) stations on volcanic arcs provide ray geometries that potentially sample slab waveguides, and data from such stations between 1992 and 2001 form the basis this study (Table 1, Fig. 1). The broadband channels, used here, sample at 20 samples-per-second and have flat response to ground velocity from <0.01 Hz to an anti-alias corner at ∼8 Hz, which includes the frequency band of interest (0.25–8 Hz). Both P and S waves are used, from the vertical and tangential components, respectively. To avoid complications from the upper plate, only events deeper than 100 km are selected from standard global catalogs (or local ones, where available in Alaska and Japan), at range (X) <750 km from the stations. At longer distances, signals become exceedingly attenuated or otherwise complicated. Records are selected if signal is visible throughout the 0.5–6 Hz 15 band, typically for events with magnitude >3.0 (greater at noisy stations) but always <5.3 to avoid complex sources. Each signal is assigned a quality rank a, b, c, or d, with a corresponding to signals above the noise throughout the 0.5–6 Hz band and with simple dispersion characteristics, b corresponding to somewhat complicated signals, c corresponding to signals with complex dispersion characteristics or obscured signals below 1 Hz, and d being unusable. The resulting data set of quality a–c consists of 210 P waves and 156 S waves recorded at one of six stations (Table 1, Fig. 8). Waveforms for Nicaragua were presented previously (Abers et al., 2003). At distances >200 km most signals show dispersion effects, as high frequency energy arriving up to several seconds after the direct P. Paths to GSN station ERM sample more than one arc segment, so these data have been subdivided into a Hokkaido-S. Kurile group (ERM-n) and a N. Honshu group (ERM-s). The S waves are highly attenuated or otherwise obscured at JTS, perhaps due to attenuation directly below the site, and those to GUMO show little pattern. The Alaska station COL was relocated 4 km to COLA in 1996, resulting in substantial increase in resonance at 1–4 Hz even for signals that do not interact with the slab (compare records with X < 100 km, Fig. 8C and D). This signal degradation presumably reflects a site effect and limits the usable data at this station. Records from several other stations were discarded for a variety of reasons, including those for all South American sites where thick upper-plate crust produces strong secondary phases, stations behind the volcanic arc which did not sample the appropriate ray paths, and stations near tectonic complexities such as subducting ridges. Unusual signals from Tonga earthquakes, recorded in New Zealand, have been described extensively in the literature and were not re-analyzed except to confirm previous work (Ansell and Gubbins, 1986; Gubbins and Snieder, 1991; van der Hilst and Sneider, 1996). These observations are limited to one suite of paths, and the paths are generally longer and deeper than those studied here. Only one record elsewhere shows high frequency preceding low frequency arrivals (reverse dispersion). That record, from COLA for an event on 6/09/2000 (Fig. 8C, record number 9), is >20 km deeper than any other examined from Alaska and is somewhat offset from the slab. It is possible 16 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Fig. 8. Quality a and b seismograms used in dispersion analysis, for P waves traveling ray paths shown in Fig. 1. (A) Aleutians recorded at ADK; (B) Kurile–Kamchatka recorded at PET; (C) Alaska recorded at COLA; (D) Alaska recorded at COL; (E) Kurile-Hokkaido recorded at ERM; (F) northern Honshu recorded at ERM; (G) Marianas recorded at GUMO. For each figure pair, left panel shows broadband seismograms (0.2–8.0 Hz) and right panel shows same data filtered at 0.75 Hz (thick lines) and 6.0 Hz (thin lines). Records are sorted from bottom to top in order of increasing path length within slab as determined from ray tracing. Records labeled (left) by event date and quality, and (right) by X = path length within slab (km), Z = event depth (km), and Baz = back-azimuth from station to event (◦ ). Station COLA replaced COL in 1996, shifted 4 km. Note increasing delay of high frequencies with increasing distance. One record on (C) (6 September 2000) shows only example of reverse dispersion. G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 17 Fig. 8. (Continued) that reverse dispersion is generated by interaction with eclogitized crust (Gubbins and Snieder, 1991) but that such crust is sampled only by certain deep rays. 4.2. Ray geometry To estimate velocities from lag times, we assume that (1) all dispersion occurs within the subducting slab, (2) signal path lengths in the slab are adequately represented by ray tracing through simple models, and (3) the direct ray travels near the waveguide while in the slab. To trace rays, the top of the subducting plate is defined by the top of the Wadati–Benioff seismicity, contoured manually from the relocated global hypocenter dataset (Engdahl et al., 1998), or from previously published contours of the Alaska–Aleutian sys- 18 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 tem (Plafker et al., 1994). Previous digitizations of slabs (Gudmundsson and Sambridge, 1998) showed significant departures from seismicity in the upper 150 km so could not be used. First-order thermal effects are approximated by setting the velocity within the slab to 5% faster than the surrounding mantle, which is set to iasp91 velocities (Kennett and Engdahl, 1991). An 8% faster slab was also tested with negligibly different final results. This geometry should approximate the path followed by low-frequency signals. A finite-difference Eikonal solver (Hole and Zelt, 1995; Vidale, 1990) generates a travel time field to stations from all points in the subduction zone, which is then numerically differenced to obtain ray trajectories. Numerical experiments showed that changes to finite-difference grid resolution or orientation changed arrival times by less than 1%. For most slab events, rays travel below the slab top for tens to hundreds of km before entering the overlying mantle wedge. The ray paths (Fig. 1) travel along slabs to a point 50–100 km distant from the stations, refracting along the slab surface, then exit into the mantle wedge. Downgoing segments of ray paths are rare, and never descend more than 6 km below the source depth, except for the Marianas where some ray paths >600 km long descend as much as 25 km into the slab below the source. In consequence, slabs are sampled by these signals at depths near or above that of the sources and near the top surface of the slab, with median sampling depths near 125 km (Fig. 9). Ray path length errors contribute only slightly to uncertainty in velocity estimates, so the results here are insensitive to the hypocenter catalog used. For a signal traveling along a waveguide a distance L and for low-frequency travel time T, the group velocity is U0 = L/T. At high frequencies, signals arrive at T + ti where ti is a differential time lag at frequency fi , so that δU(fi ) = U(fi ) − U0 = L/(T + ti )−L/T. Errors in L of dL, lead to errors in δU(fi ) of −(ti /T)(dL/L)U0 , to first order. Commonly L ∼ 200–500 km, and characteristic errors in path length (from event mislocation and errors in slab ray tracing) are 10–25 km, so dL/L ∼ 5% (2–12%). Typically ti /T = 5–15% (roughly equal to dln V; see below), so errors in differential velocities due to path length uncertainties should be of order 0.5% (0.1–2%), a small fraction the anomalies reported. The interpretation of waveguide velocities (Section 3) assumes that the first-arriving, long-period arrival Fig. 9. Distribution of rays with depth within each slab segment, from three-dimensional ray tracing. Only portions of rays below slab top are included. Dashed lines: 100 and 150 km depth; dotted line: median sampling depth. travels the same path as the guided wave, so that the direct wave follows the slab surface. Typically, 75% of all rays lie within 10 km of the slab surface until they exit the slab, with exceptions corresponding to events located far from the slab surface. The velocity contrast between the high-velocity slab and the low-velocity wedge above it guides most signals measured here, so that first-arriving signals follow the top of slabs until rays exit slabs beneath stations (Fig. 1). In Nicaragua, the direct rays plunge 25–50 km below the slab surface, even though earthquakes lie just below it. Rays in Alaska plunge up to 20 km below the surface. Rays take such plunging paths because the Nicaragua and Alaska slabs exhibit a weak negative curvature. The effects on estimated path length are slight; a path beneath Nicaragua that follows the 100 km depth contour (along the slab surface) would be at most 1.5% longer than the computed ray paths. Effects are less for paths <600 km long, and similar path errors for Alaska are negligible. As a result, highfrequency waves that follow the slab surface will arrive at an apparent velocity that is no more than 1.5% slower than the direct arrival in Nicaragua, a small part of the 13% anomalies measured. Overall, ray paths can be assumed to follow the waveguide to within the uncertainties of measurement, and severe multipathing seems unlikely. G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 19 4.3. Regional velocity V0 In some cases, the arrival times of the first-arriving (low-frequency) signal can place bounds on absolute velocities. These velocities constrain the composition and temperature of the region sampled by the low-frequency signals, inferred to be that surrounding the waveguide (see above). Where station coverage is sparse, hypocenter errors can exceed the residuals, so single-station measurements of arrival time provide little constraint on velocities. Also the locations trade off with the velocities, because the stations used to measure dispersion can be critical to locating the earthquake. As a result, only two arc segments studied here, Alaska and Hokkaido, have hypocenters good enough to avoid these effects, as is evident from the correlation between arrival time residuals and ray path length in the slab (Fig. 10). Residuals are calculated relative to the (USGS or Alaska network) catalog location and the iasp91 travel time curves (Kennett and Engdahl, 1991). The paths in Alaska and Hokkaido sample P velocities 2.8–5.3% and 0.3–7.1% faster, respectively, and S velocities 4.5–6.0% and 3.8–6.6% faster, respectively, than iasp91. These estimates are derived from the moveout of residuals in Fig. 10, so should be unaffected by uniform biases between iasp91 and the travel-time curves used to calculate origin times (Kennett and Engdahl, 1991). At 75–150 km depth, the requisite velocities would then be 8.3–8.6 km/s for Vp and 4.7–4.8 km/s for Vs , or roughly 3–6% faster than iasp91. Because some tradeoff may still exist between hypocenter and velocities, these are likely underestimates. This observation is consistent with propagation through a mantle that is overall colder than average, at velocities consistent with those inferred for the interior of slabs globally (Lay, 1997). 4.4. High-frequency lags and waveguide velocities As a rough estimate of velocities within waveguides, the lags of 3–6 Hz energy relative to the first arrival are measured as a function of ray path length (Fig. 11). For all stations, the lags increase with increasing range, as expected from a dispersion effect that scales with path length within the slab. These lag times include a delay between the high-frequency pulse onset and the peak of the Hilbert-transform envelope. Within nar- Fig. 10. Arrival time residuals for first-arriving (low-frequency) signals at two stations as a function of predicted ray path length in slab, relative to the iasp91 travel times (Kennett and Engdahl, 1991) and the U.S.G.S. catalog hypocenters. Solid circles: P waves; open circles: S waves. Lines show best-fit robust regressions. Negative slopes indicate fast paths, as expected for propagation in cold anhydrous slabs. row frequency bands this delay should not change with distance, however, so the slope of the curves should scale to the relative velocity within each slab (Table 2). Hence, most waveguides are 3–8% slower than their surroundings. Table 2 P velocities inferred from moveout of 3–6 Hz signal relative to onset Station dT/dX (s/km) dln Vp a ADK COL(A) ERM GUMO JTS PET 0.003119 0.002743 0.005399 0.008898 – 0.006264 −0.027 −0.023 −0.046 −0.076 −0.145b −0.053 a b For reference Vp0 = 8.5 km/s. From Abers et al. (2003), events <150 km deep. 20 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Fig. 12. Results from fitting dispersion curves at several arcs (Table 1). Each LVZ is assumed to have a constant thickness but differing velocities in three regimes: 0–100 km depth (dark gray bars and circles), 100–150 km depth (light gray bars and triangles; Table 4), and >150 km depth (open bars and inverted triangles). Fig. 11. Lag of high-frequency energy (3–6 Hz) from first arrival as a function of path length within slab, for P waves. Each symbol corresponds to a different arc segment (Table 1); lower-left corner of station name lies at 0 s lag. Trend shows progressive lag of high frequencies, and slope gives velocity anomaly seen by high frequencies. Lines show trend (Table 2) from robust slope estimation. Lags for JTS shown elsewhere (Abers et al., 2003). 5. Inversions for North Pacific Arcs For each arc, all measured dispersion curves are inverted for waveguide structure in the manner described in Section 3, jointly inverting all dispersion curves for each phase (P or S). Several inversions are done for each slab, varying the number of parameters that describe the waveguide. In the simplest inversions, the waveguide is treated as a single homogeneous layer. The dln Vp range from 3 to 8% slow, with dln Vs /dln Vp ∼ 1 (Table 3). These velocities overlap with the 5–8% slow range reported previously (Abers, 2000) although the size of the data set has more than doubled. They also correlate closely with velocities inferred from moveout of high-frequency energy (Table 2; Section 4.4), as expected. Normalized waveguide thicknesses lie in the range H/V0 = 0.22−0.65 s for P or 0.43−0.78 s for S, with 15–40% uncertainties at 90% confidence. These estimates correspond to H = 2–4.5 km for both P and S measurements. The P and S data sets give sim- ilar thickness estimates even though the actual frequency content of the signals differ, supporting the inference that waveguide effects produce the dispersion. Again, the thickness estimates probably underestimate true thickness by up to a factor of two (Section 3.2); a more realistic bounds on layer thickness may be 2–8 km. In a final set of inversions, the waveguide at each arc is divided into three segments, one spanning depths 0–100 km, a second at 100–150 km, and a third at >150 km depth (Table 4, Fig. 12). This inversion isolates rays at a common depth range for all arcs (100–150 km), to overcome potential biases in sampling with depth (Fig. 9). The parameter estimates (Fig. 12) and dispersion curves (Fig. 13) show greater dispersion at shallower depths. In other words, the waveguide effect decays as the slab descends. The deepest segments all show layer velocity anomalies of less than 8% in absolute amplitude, averaging 3.5% slow, while at <150 km depth the waveguides average 7% slow and can be as much as 13 ± 3% slower than surrounding mantle. This effect was first documented for Nicaragua (Abers et al., 2003), and is consistent with observations in Japan that show ∼15% slow layers at 50 km depth (Hori et al., 1985) and 6% slow layers at >100 km depth (Matsuzawa et al., 1986). G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 21 Table 3 Results from inversion assuming constant waveguide velocitya Station Phase nVarb H/V0 (s) dln V ADK COL ERM-n ERM-s GUMO JTS PET ADK COL(A) ERM-n ERM-s GUMO JTS PET P P P P P P P S S S S S S S 0.590 0.726 0.533 0.481 0.457 0.371 0.546 0.451 0.390 0.613 0.491 0.581 0.583 0.504 0.44 [0.21, 0.58] 0.65 [0.49, 1.06] 0.49 [0.39, 0.62] 0.37 [0.14, 0.49] 0.22 [0.16, 0.28] 0.41 [0.35, 0.46] 0.35 [0.21, 0.49] 0.5 [0.35, 0.66] 0.47 [0.38, 0.56] 0.75 [0.52, 1.1] 0.56 [0.21, 0.72] 0.43 [0.29, 0.56] 0.78 [0.45, 1.19] 0.49 [0.33, 0.54] −0.036 [−0.05, −0.028] −0.027 [−0.036, −0.018] −0.045 [−0.058, −0.035] −0.037 [−0.057, −0.031] −0.083 [−0.095, −0.075] −0.084 [−0.112, −0.067] −0.046 [−0.055, −0.039] −0.054 [−0.071, −0.038] −0.049 [−0.057, −0.042] −0.028 [−0.044, −0.017] −0.03 [−0.054, −0.024] −0.063 [−0.082, −0.049] −0.048 [−0.066, −0.04] −0.041 [−0.047, −0.034] a b Brackets show 90% confidence range from bootstrap. Variance of residual time lags normalized to variance of data. The dispersion curves (Fig. 13) and inferred waveguide velocities (Table 4; Fig. 12) also show variations of a factor of 2 and 3 from arc to arc in the 100–150 km depth range. This variation exceeds that in the homogeneous-layer inversion, suggesting that some real variation had been masked by depth averaging. The slab segments sampled at GUMO and JTS show some of the slowest waveguide velocities. At JTS, velocities for 100–150 km depth (13 + 6/−5% slow) match those determined previously with a somewhat simpler approach (Abers et al., 2003). 6. Discussion 6.1. V0 and low slab temperatures Absolute velocities, where they can be measured, show that the low-frequency signals travel 3–6% faster than predicted from global models (Fig. 10). Presumably, these signals represent the slab mantle beneath the waveguide. Fig. 14 compares the estimated lowfrequency velocities to predictions for a range of ultramafic compositions, using the elasticity data base of Table 4 Inversion results assuming velocity changes at 100, 150 km depth Station Phase nVara H/Vo (s) dln V (100–150 km depth) ADK COL(A) ERM-n ERM-s GUMO JTS PET ADK COL ERM-n ERM-s GUMO JTS PET P P P P P P P S S S S S S S 0.581 0.688 0.528 0.470 0.448 0.301 0.514 0.438 0.382 0.589 0.413 0.542 0.518 0.495 0.35 [0.16, 0.49] 0.47 [0.39, 0.69] 0.46 [0.27, 0.54] 0.31 [0.05, 0.43] 0.21 [0.14, 0.27] 0.35 [0.26, 0.38] 0.29 [0.16, 0.39] 0.40 [0.24, 0.52] 0.45 [0.35, 0.53] 0.50 [0.44, 0.74] 0.30 [0.17, 0.45] 0.32 [0.19, 0.52] 0.55 [0.26, 0.62] 0.41 [0.30, 0.53] −0.01 [−0.06, 0] −0.02 [−0.04, 0] −0.03 [−0.06, −0.01] −0.02 [−0.08, 0] −0.10 [−0.13, −0.08] −0.13 [−0.19, −0.08] −0.05 [−0.08, −0.04] −0.03 [−0.11, 0] −0.05 [−0.07, −0.03] −0.01 [−0.03, 0.] 0.00 [−0.07, 0.] −0.10 [−0.13, −0.08] −0.08 [−0.11, 0] −0.03 [−0.06, −0.02] a Variance of residual time lags normalized to variance of data. 22 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Fig. 13. Observed P wave dispersion curves for each arc and depth segment, and corresponding fit from inversion (Fig. 12). Vertical axis shows dln U, fractional change in group velocity, corrected to zero at 0.25 Hz. Results shown only for depth ranges sampled by >5% of ray path lengths. Shallower depths generally produce greater waveguide anomalies, and high frequencies are usually 5–15% slower than low frequencies. Hacker and Abers (2004), and shows that the fast observed velocities can be explained only by propagation in cold and largely anhydrous mantle. The ultramafic compositions plotted represent the range of probable anhydrous slab compositions from enriched lherzolite to harzburgite (Hacker et al., 2003a). The velocity estimates assume a fixed Mg number of 0.9 and ignore effects of anelastic dispersion on velocities (Karato, 1993), which should be negligible at these low temper- atures. The iasp91 velocities indicate temperatures of 1200–1350 ◦ C at these compositions, while the higher velocities sampled by low-frequency ray paths indicate temperatures of 400–900 ◦ C. For comparison, the weakly hydrated peridotites would have significantly lower velocities, lower than those observed unless temperatures are below 400 ◦ C. The weakly hydrated case assumes 1.3 wt.% H2 O, calculated by mechanically mixing the appropriate hydrous with anhydrous high-P G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 23 Fig. 15. Predicted relations between water content and seismic P velocities, after Abers et al. (2003). Circles: predictions calculated for lithologies as labeled at 3 GPa and 400 ◦ C following Hacker et al. (2003a,b), referenced to pyrolite. Thin lines: predictions for free fluid in isolated pores (spheres; dotted), interconnected tubes (dashed), or penny-shaped cracks (solid) for H2 O in pyrolite, as described previously (Abers, 2000). Thick gray lines: regression relation on rocks, dln Vp /d (wt.% H2 O) = −2.0 ± 0.2 (% per%), or gabbro-eclogite mixing trend. Fig. 14. Calculated velocities for peridotites at 4 GPa compared with seismic constraints. Bulk compositions are lherzolite (l hz), depleted lherzolite/enriched harzburgite (dl hz) and harzburgite (harz) of Hacker et al. (2003a,b), calculated for high-pressure garnet peridotite facies (dry), both dry and mixed with hydrated facies for a bulk 1.3 wt.% H2 O (hyd). Hydrous facies are serpentinite below 600 ◦ C or chlorite-peridotite at 600–800 ◦ C, their approximate stability limits. Dotted lines: velocities at 120 km depth from iasp91 (Kennett and Engdahl, 1991). Gray boxes: velocity constraints from arrival times of low-frequency arrivals (Fig. 10). endmembers of identical bulk composition (Hacker et al., 2003a). Thus, the arrival times require propagation through a cold and largely anhydrous slab, and limit H2 O content over large parts of the downgoing plate. They also probably rule out the possibility that any region below the low-velocity zone is hot enough to allow partial melt. 6.2. Causes of the low velocity layer: fluids and temperature Eclogite has Vp similar to or exceeding that of anhydrous peridotite (Gubbins et al., 1994), so the low- velocity layer cannot be eclogite. Eclogite should be the stable mafic phase at these pressures for temperatures above c. 500–650 ◦ C (e.g., Hacker et al., 2003a; Peacock, 1993; Schmidt and Poli, 1998). This leaves four classes of potential explanations for the lowvelocity layer: gabbroic crust persists metastably, a serpentinized layer lies above or below the subducting crust, hydrated oceanic crust (with H2 O bound in hydrous minerals) persists to great depth at low temperatures, or abundant free fluid exists in pores. The first three cases require low temperature in or near the subducted crust, and the last three indicate that slow wave speeds correlate with the extent of hydration (Fig. 15). If sufficiently cold and hydrated, mafic crust can contain several wt.% H2 O to 6 GPa, which would cause seismic velocities to be 5–15% slower than surrounding mantle (e.g., Connolly and Kerrick, 2002; Hacker et al., 2003a). Similarly, serpentinized upper mantle within the descending plate could form a potentially major reservoir for additional fluids (Peacock, 2001; Rüpke et al., 2002), as could hydrated mantle immediately above the downgoing crust (Davies and Stevenson, 1992). Free H2 O must exist in at least trace quantities, as it is transported out of the slab, and forms a poten- 24 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 tially significant reservoir at depth. In all mineralogical cases the relationship between H2 O content and dln Vp is similar: a 2 wt.% increase in H2 O produces a 1% decrease in dln Vp (Fig. 15). Free fluid shows a similar relationship, provided that the pores are interconnected. Anhydrous gabbro could persist metastably to considerable depth in slabs (Ahrens and Schubert, 1975; Hacker, 1996), and would form a 10–15% slow layer that is either the thickness of the entire oceanic crust (6–8 km) or the thickness of the lower crust (2.5–4 km). Such slow velocities are observed in the slowest waveguides, in the Marianas and Nicaragua, but most waveguides show layers <10% slow, too fast to be pure metastable gabbro (Fig. 12). The intermediate velocities could reflect varying degrees of eclogitization, provided that some mechanism exists that could regulate the gabbro → eclogite transformation to different rates in different subduction zones. Also, the resulting gabbro-eclogite mixture would need to be well mixed at a scale comparable to the waveguide thickness, in order to trap signals effectively. Increased temperature, decreased grain size, increased availability of fluids, higher strain rates, and increased iron content all enhance the gabbro → eclogite transformation (Ahrens and Schubert, 1975; Hacker, 1996; Rubie, 1990). Gabbros in subducting oceanic crust have limited compositional variation and most strain is likely occurring in the overlying wedge, so the main controls should be fluid abundance and temperature. Observations of natural rocks show that coarsegrained dry gabbros can persist untransformed far into the eclogite stability field (up to 800 ◦ C), but in the presence of fluids they transform near equilibrium (Hacker, 1996). Beyond those constraints, though, the conditions for metastability remain poorly understood. Are the waveguides slow because of hydrous phases within them, or because they contain metastable gabbro that is too dry to react? On the basis of seismic velocities alone it is difficult to tell, although the two hypotheses predict opposite relationships between seismic velocities and fluid content. Some systematics (Section 6.5) indicate that slower velocities are seen where H2 O can be expected to be more abundant, near seismicity and where slabs dip steeply, favoring the first hypothesis. All of these scenarios indicate low temperatures inside the waveguide. At 3–5 GPa, hydrated mafic assem- blages are stable at temperatures below either 450 ◦ C (Hacker et al., 2003a) or 650 ◦ C (Connolly and Kerrick, 2002; Schmidt and Poli, 1998), while serpentine will be stable at temperatures up to 650 ◦ C (Schmidt and Poli, 1998; Ulmer and Trommsdorf, 1995), and chlorite may persist in peridotites up to 800 ◦ C (Hacker et al., 2003a). The temperature requirements for gabbro metastability are less clear. Using a calibration of crustal metamorphic reaction rates (Baxter, 2003), we calculate that the gabbro → eclogite reaction should take place in 4–100 Ma at temperatures varying from 600 to 800 ◦ C, for mm to cm grain sizes. This calculation has reported uncertainty of one order of magnitude, and assumes that the rate-limiting processes are similar to those involved in regional crustal metamorphism. In summary, temperatures within the waveguide appear to be less than 600–800 ◦ C for either the metastability or hydration hypotheses, although the conditions for metastability remain poorly understood. By contrast, geochemical tracers in arc magmas indicate that sediment routinely melts, requiring temperatures at the top of the slab (but at unknown depth) to be in excess of 800 ◦ C (Johnson and Plank, 1999). It may be that both observations can be accommodated by a very steep thermal gradient at the top of the slab, as predicted by thermal models that incorporate temperature-dependent viscosity (van Keken et al., 2002). 6.3. Variations in depth The results (Tables 3 and 4, Fig. 12) modify the conclusions reported previously (Abers, 2000) in that the waveguide velocities vary widely between different arcs and with vary with depth. Although waveguides are on average 5–8% slower than the surrounding mantle, they are even slower in roughly half the cases at depths less than 150 km. At greater depth, the waveguides are less apparent. Such a trend is consistent with petrologic phase equilibria; increasing pressures and temperatures trigger a sequence of progressive dehydration reactions in mafic and ultramafic rock (Schmidt and Poli, 1998). As dehydration progresses, seismic velocities approach those of anhydrous eclogite (in mafic rocks) or peridotite (in ultramafic rocks). Delayed eclogite formation in anhydrous gabbros could exhibit a similar trend, although it is unclear why the reaction would consistently take place near 150 km depth. G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 25 earthquake abundance with increasing depth may then reflect a gradual decrease in the rate of devolatilization as eclogite formation progresses. This scenario is consistent with receiver-function images of waveguide disappearance and correlative seismicity variations in the Alaska slab (Ferris et al., 2003). 6.4. Waveguides and intermediate-depth earthquakes The forward modeling results indicate that earthquakes must be located within or very close to the waveguide in order to generate dispersed signals (Fig. 4), similar to the conclusion reached by 2D finite difference modeling (Martin et al., 2003). Receiverfunction images of slab low velocity channels also show that many intraslab earthquakes lie within the channel, at least at depths less than 150 km (Ferris et al., 2003; Yuan et al., 2000). The most obvious explanation is that the conditions for intermediate-depth seismogenesis occur within the waveguide but not necessarily outside it. In some situations earthquakes must be able to nucleate in the deeper slab mantle, because double seismic zones exist. However, the vast majority of earthquakes lie in single planes or the upper plane of double seismic zones, near subducting crust, so it seems reasonable that the conditions for seismogenesis are most commonly found within the waveguides imaged here. Elsewhere, we have argued that low-velocity waveguides and intermediate-depth earthquakes both exist as a consequence of dehydration (Hacker et al., 2003b), so that earthquakes lie in or near low-velocity channels because they are triggered by the release of volatiles during metamorphism. The gradual decay in 6.5. Variations among arcs: updip fluid flow? The waveguide velocities at 100–150 km depth vary considerably between arcs (Fig. 12, Table 4). In order to understand this variation, the velocities are compared with a variety subduction parameters (Table 5; Fig. 16). The waveguide velocities (dln Vp ) may be influenced by parameters such as slab dip (δ), convergence rate (V), plate age (A), and the thermal parameter Φ = AV sin ␦ (Kirby et al., 1996; Molnar and Gray, 1979). The latter three, related to variations in temperature of the slab interior, correlate poorly with dln Vp (Table 5). The poor correlations with Φ, V, and A indicate that temperature within the slab does not control velocities in the waveguide. The slab descent rate, a potential control on the temperature at the slab surface (England et al., 2004), also correlates poorly with dln Vp (|R| < 0.1), further suggesting that temperature does not play a major role in waveguide velocities. The dln Vp also correlate poorly with mean depth of sampling (correla- Table 5 Arc parametersa and correlation with velocities Arc Zray (km) Aleutian Alaska Hokkaido N. Honshu Mariana Nicaragua N. Kurile 131 108 122 128 161 114 138 ± ± ± ± ± ± ± 35 20 24 35 26 37 38 DipV (◦ ) 49 37 43 36 58 68 47 ± ± ± ± ± ± ± 6 2 5 3 7 3 4 Correlationc with dln V (100–150 km) R (P) −0.241 −0.911 R (S) −0.358 −0.752 a DipE (◦ ) 42 25 29 29 60 62 45 ± ± ± ± ± ± ± 3 4 3 1 2 1 3 −0.892 −0.777 Incoming plate age (Ma) 60 50 104 98 118 28 73 ± ± ± ± ± ± ± 0.181 0.152 7 3 3 8 5 1 3 Convergence rate (mm/year) 70 57 90 91 38 68 76 ± ± ± ± ± ± ± 0.495 0.901 2 2 0 1 1 2 1 Φ (102 km) 23 12 43 44 38 17 39 ± ± ± ± ± ± ± 0.163 0.391 1 1 3 3 3 3 6 Grabensb 2 1 1 3 3 3 3 −0.527 −0.328 Zray = range of sampling depth for rays; DipV = slab dip from contoured surface to slab seismicity calculated below volcanic arc; DipE = slab dip averaged from trench to deepest earthquake in convergence direction (Gorbatov and Kostoglodov, 1997); Φ = thermal parameter (see text); DipE, incoming plate age, convergence rate, and Φ from profiles of Gorbatov and Kostoglodov (1997) except for Nicaragua, for which their methodology was replicated. Uncertainties are 1 − σ variations between profiles, except Φ which is their averaged reported uncertainty, and Zray and DipV which are calculated here. b Grabens seaward of trench wall classified by Hilde (1983) as (3) “well-developed”, (2) “variously developed”, or (1) “less obvious”; Nicaragua classified as (3). c R = correlation coefficient between each parameter and dln V at 100–150 km depth from Table 4; R(P) for P waves; R(P) for S waves. 26 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 Fig. 16. Correlations between waveguide P velocity and subduction zone parameters, for (A) dip measured on slab surface beneath volcanic arc; (B) dip averaged between trench and deepest earthquakes (Gorbatov and Kostoglodov, 1997); and (C) thermal parameter Φ, a measure of expected maximum depth of cold temperatures within slab. R is correlation coefficient. tion coefficient |R| < 0.24), indicating that the variation does not represent a depth bias or a bias related to path geometry. Convergence rate correlates well with dln Vs but not dln Vp . It is not clear why this should be the case, but the S dispersion measurements are less accurate than P. S wave dispersion is contaminated by P coda, high frequencies can be significantly attenuated, and S wave excitation of waveguides is more sensitive than P to the source mechanism. Hence, correlations in the S data but not the P are viewed with skepticism. The waveguide velocities correlate best with slab dip (Table 5). Dip is measured in two independent ways. One, DipV, measures the dip of digitized slab surfaces (used for ray tracing, Section 2.3) directly beneath each arc volcano, averaged along each slab segment. A second measure (DipE in Table 5) takes dips from Gorbatov and Kostoglodov (1997), which are averaged from trench to deepest earthquake in each slab segment. Nicaragua was not included in that study, so its parameters are estimated following the method described by the authors. The DipE measurements are derived from independent data, so constitute a check on the DipV results, but DipV probably reflects better the local slab geometry where waveguides are observed. Both dip measures give strong correlations (R = −0.89 versus −0.91 for dln Vp ) although DipV exceeds DipE by 5–10◦ . R will be significant at the 95% confidence interval if |R| > 0.829, provided the seven data have approximately Gaussian errors. The S-wave velocities do not show correlations that are as high, presumably reflecting greater noise for reasons discussed above. Some process probably unrelated to temperature must link dip to dln V. The correlations indicate greater hydration in steeper slabs, or slower gabbro → eclogite reaction rates. One possibility is that additional H2 O is delivered to slabs at 100–150 km depth, from dehydration at greater depths (Fig. 17). As hydrous phases break down and release volatiles within the slab, buoyancy should drive upward fluid flow. The permeability structure through which fluids pass is unlikely to be homogeneous, and permeability fabric are probably oriented parallel to the slab surface. As a consequence, a significant fraction of aqueous fluids may travel up dip rather than vertically; other paths may exist as well to drive fluids into deeper portions of the downgoing plate (Hacker et al., 2003b). Any dip-parallel anisotropy in permeability could create such a pathway, so it seems reasonable that up-dip flow will be favored in slabs that dip more steeply. Hence, in steeply dipping slabs the metamorphic fluids may tend to migrate preferentially up dip. It is less clear how steep dips (but not faster descent rates) would suppress eclogite formation in anhydrous gabbro. Fluids migrating up the slab may decrease dln V in two ways. First, a free fluid fraction directly reduces seismic velocities (Fig. 15). Second, the addition of fluid allows hydrous phases to form in rock oth- G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 27 6.6. Fluid transport to deeper mantle While these variations indicate significantly differing fluid pathways and metamorphic histories in steeply-dipping slabs than shallow ones, there may be little difference in the amount of H2 O delivered to greater depths. At all slabs, the waveguide anomalies below 150 km depth do not exceed 8% slow and are on average 3.5% slow, indicating that the enhanced hydration seen at <150 km depth has disappeared. These measurements allow somewhat less than 2 wt.% H2 O on average past 150 km depth over a layer 4 ± 3 km thick, a substantial fraction of the fluid likely delivered to the trench. However, 1–3% velocity anomalies lie within measurement error, and velocities in anhydrous eclogites or peridotites can vary by this much depending upon bulk composition (Gubbins et al., 1994; Hacker et al., 2003a). As a result, no H2 O need be present below 150 km depth to explain the observations, although up to 2 wt.% is allowed. Equivalently, H2 O flux to the deep mantle in these layers must be less than 0.7 × 1012 kg/year, perhaps much less. Fig. 17. Cartoon illustrating how flow of metamorphic fluids might be affected by slab dip and permeability structure, for: (A) low dips. (B) high dips. Greater dips may favor up-dip fluid transport (black arrows), adding fluid beyond that delivered from the trench (open arrow). erwise undersaturated in H2 O. Undersaturation may be common; mafic rocks at 2–5 GPa can hold up to 5.4 wt.% H2 O and serpentinized harzburgites can contain over 13 wt.% H2 O (e.g., Hacker et al., 2003a), but the subducting oceanic crust likely does not contain more than 1–3 wt.% H2 O at trenches (e.g., Alt et al., 1996; Kerrick and Connolly, 2001; Peacock, 1990). The low seismic velocities seen in steeply dipping slabs (dln V ∼ −10–15%) indicate up to 5 wt.% H2 O (Fig. 15), so an additional source of fluids may be required, such as from deeper dehydration reactions. This scenario requires temperatures low enough for hydrous phases to be stable, which may be the case in the lower crust away from the plate interface (van Keken et al., 2002). One important consequence is that the hydration inferred from seismic velocities does not represent the total flux from oceans into the deep mantle, but the sum of downward flux from subduction and up-dip transport associated with deeper devolatilization. 7. Conclusions Low velocity waveguides several kilometers thick are a common if not ubiquitous feature of subducting plates. They manifest themselves as mode-converted signals and dispersion of body waves. A series of numerical experiments illustrate the range of conditions in which such phases can be observed. Waveguides produce body-wave dispersion only for a favorable raypath geometry, one that requires sources to lie inside or very close to the waveguides. In most cases, dispersion indicates waveguide thicknesses of 2–8 km, with large uncertainties because of the difficulty in resolving higher-mode excitation. The waveguides show substantial variations in velocity both with depth and between arcs. Waveguides show the lowest velocities at the shallowest depths where they reach velocity anomalies of dln VP ∼ −14% in some slabs. Such low velocities can be explained by either metastable gabbro or fully hydrated mafic rocks at low temperatures. Deeper than 150 km, most slabs show |dln VP | < 4%, indicating that the anomalous layer has largely equilibrated with the surrounding mantle. Between different subduction zones, dln V varies by a factor of 2–3 at depths less than 150 km. These varia- 28 G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 tions correlate with slab dip but do not correlate with convergence velocity, plate age, thermal parameter, or sampling depth. One explanation is that steeply dipping slabs (Nicaragua, Marianas) create conditions that favor up-dip transport of fluids from deep dehydration reactions. In gently dipping slabs, the buoyancy of the fluids more readily drives them into the overlying mantle wedge. Presumably a steady state fluid flux is achieved, with fluids ascending up the slab, into the mantle wedge, and into the deep mantle at fixed rates. These observations and their correlations with slab parameters support the inference that low-velocity slab waveguides reflect the presence of fluids or hydrous minerals, rather than variable metastability of anhydrous gabbros, although that possibility cannot be ruled out. This inference could be tested with careful observations of Poisson’s ratio, and additional measurements of absolute velocity. Magnetotelluric measurements have the potential to resolve this issue, by distinguishing interconnected fluid from dry rock along the top of the slab (Evans et al., 2002). Acknowledgments The GSN data have been provided by the IRIS Data Management Center. Some figures are made using GMT (Wessel and Smith, 1991). The work benefited substantially from detailed comments by B. Hacker on an early draft, by reviews from E.R. Engdahl and G. Helffrich, and by the volume editor S. King. This work supported by NSF Grants EAR0096027, EAR0096028, and EAR 0215577. References Abers, G.A., 2000. Hydrated subducted crust at 100–250 km depth. Earth Planet. Sci. Lett. 176, 323–330. Abers, G.A., Hacker, B.H., Plank, T., 2003. The wet Nicaragua slab. Geophys. Res. Lett. 30 (2), 1098, doi: 10.1029/2002GL015649. Abers, G.A., Sarker, G., 1996. Dispersion of regional body waves at 100-150 km depth beneath Alaska: in situ constraints on metamorphism of subducted crust. Geophys. Res. Lett. 23, 1171–1174. Ahrens, T.J., Schubert, G., 1975. Gabbro-eclogite reaction rate and its geophysical significance. Rev. Geophys. Space Phys. 13, 383–400. Alt, J.C., et al., 1996. Hydrothermal alteration of a section of upper oceanic crust in the eastern Equatorial Pacific; a synthesis of results from site 504 (DSDP legs 69–70, and 83, and ODP legs 111, 137, 140, and 148). Proc. Ocean Drill. Prog. Sci. Res. 148, 417–434. Ansell, J.H., Gubbins, D., 1986. Anomalous high-frequency wave propagation from the Tonga-Kermadec seismic zone to New Zealand. Geophys. J.R. Astr. Soc. 85, 93–106. Baxter, E.F., 2003. Natural constraints on metamorphic reaction rates. In: Vance, D., Müller, W., Villa, I.M. (Eds.), Geochronology: Linking the Isotopic Record with Petrology and Textures, Spec. Pub. 220. Geol. Soc., London. Connolly, J.A.D., Kerrick, D.M., 2002. Metamorphic controls on seismic velocity of subducted oceanic crust at 100–250 km depth. Earth Planet. Sci. Lett. 204, 61–74. Davies, J.H., Stevenson, D.J., 1992. Physical model of source region of subduction zone volcanics. J. Geophys. Res. 97, 2037–2070. Dziewonski, A., Bloch, S., Landisman, M., 1969. A technique for the analysis of transient seismic signals. Bull. Seism. Soc. Am. 59, 427–444. Dziewonski, A.M., Chou, T.A., Woodhouse, J.H., 1981. Determination of earthquake source parameters from waveform data for studies of global and regional seismicity. J. Geophys. Res. 86, 2825–2852. Engdahl, E.R., van der Hilst, R., Buland, R., 1998. Global teleseismic earthquake relocation with improved travel times and procedures for depth determination. Bull. Seism. Soc. Am. 88, 722–743. England, P., Engdahl, E.R., Thatcher, W., 2004. Systematic variations in the depths of slabs beneath arc volcanoes. Geophys. J. Int. 156, 377–408. Evans, R.L., Chave, A.D., Booker, J.R., 2002. On the importance of offshore data for magnetotelluric studies of ocean-continent subduction systems. Geophys. Res. Lett. 29 (9), 16.1–16.4, doi: 10.1029/2001GL13960. Ferris, A., Abers, G.A., Christensen, D.H., Veenstra, E., 2003. High resolution image of the subducted Pacific (?) plate beneath central Alaska 50–150 km depth. Earth Planet. Sci. Lett. 214, 575–588. Gorbatov, A., Kostoglodov, V., 1997. Maximum depth of seismicity and thermal parameter of the subducting slab: General empirical relation and its application. Tectonophysics 277, 165–187. Gubbins, D., Barnicoat, A., Cann, J., 1994. Seismological constraints on the gabbro-eclogite transition in subducted oceanic crust. Earth Planet. Sci. Lett. 122, 89–101. Gubbins, D., Snieder, R., 1991. Dispersion of P waves in subducted lithosphere: evidence for an eclogite layer. J. Geophys. Res. 96, 6321–6333. Gudmundsson, O., Sambridge, M., 1998. A regionalized upper mantle (RUM) seismic model. J. Geophys. Res. 103, 7121–7136. Hacker, B.R., 1996. Eclogite formation and the rheology, buoyancy, seismicity, and H2O content of oceanic crust. In: Bebout, G.E., Scholl, D., Kirby, S., Platt, J.P. (Eds.), Subduction: Top to Bottom. AGU Monogram Series of American Geophysical Union, Washington, DC, pp. 337–346. Hacker, B.R., Abers, G.A., 2004. Subduction factory 3. An Excel worksheet and macro for calculating the densities, seismic wave speeds, and H2 O contents of minerals and rocks at pressure and temperature. Geochem. Geophys. Geodyn. (G3), 5, Q01005, doi: 10.1029/2003GC000614. Hacker, B.R., Abers, G.A., Peacock, S.M., 2003a. Subduction factory 1: theoretical mineralogy, density, seismic wavespeeds, G.A. Abers / Physics of the Earth and Planetary Interiors 149 (2005) 7–29 and H2 O content. J. Geophys. Res. 108 (B1), 2029, doi:10.1029/2001JB001127. Hacker, B.R., Peacock, S.M., Abers, G.A., Holloway, S.D., 2003b. Subduction factory 2. Are intermediate-depth earthquakes in subducting slabs linked to metamorphic dehydration reactions? J. Geophys. Res. 108 (B1), 2030, doi: 10.1029/2001JB001129. Helffrich, G., 1996. subducted lithospheric slab velocity structure: observations and mineralogical inferences. In: Bebout, G.E., Scholl, D., Kirby, S., Platt, J.P. (Eds.), Subduction: Top to Bottom. AGU Monogram Series of American Geophysical Union, Washington, DC, pp. 215–222. Helffrich, G., Abers, G.A., 1997. Slab low-velocity layer in the eastern Aleutian subduction zone. Geophys. J. Int. 130, 640–648. Helffrich, G.R., Stein, S., 1993. Study of the structure of the slabmantle interface using reflected and converted seismic waves. Geophys. J. Int. 115, 14–40. Hilde, T.W.C., 1983. Sediment subduction versus accretion around the Pacific: convergence and subduction. Tectonophysics 99 (2–4), 381–397. Hole, J.A., Zelt, B.C., 1995. 3-D finite-difference reflection travel times. Geophys. J. Int. 121, 427–434. Hori, S., Inoue, H., Fukao, Y., Ukawa, M., 1985. Seismic detection of the untransformed “basaltic” oceanic crust subducting into the mantle. Geophys. J.R. Astr. Soc. 83, 169–197. Igel, H., Ben-Zion, Y., Leary, P.C., 1997. Simulation of SH- and P-SV-wave propagation in fault zones. Geophys. J. Int. 128, 533–546. Johnson, M.C., Plank, T., 1999. Dehydration and melting experiments constrain the fate of subducted sediments. Geochem. Geophys. Geosys. 1, p. GC000014. Karato, S., 1993. Importance of anelasticity in the interpretation of seismic tomography. Geophys. Res. Lett. 20, 1623–1626. Kennett, B.L.N., Engdahl, E.R., 1991. Travel times for global earthquake location and phase identification. Geophys. J. Int. 105, 429–465. Kerrick, D.M., Connolly, J.A.D., 2001. Metamorphic devolatilization of subducted oceanic metabasalts: implications for seismicity, arc magmatism and volatile recycling. Earth Planet. Sci. Lett. 189, 19–29. Kirby, S., Engdahl, E.R., Denlinger, R., 1996. Intermediate-depth intraslab earthquakes and arc volcanism as physical expressions of crustal and uppermost mantle metamorphism in subducting slabs. In: Bebout, G.E., Scholl, D., Kirby, S. (Eds.), Subduction: Top to Bottom,. Geophysical Monograph 96, American Geophysics Union, Washington, DC, pp. 195–214. Lay, T., 1997. Structure and Fate of Subducting Slabs. Academic Press, p. 185. Levshin, A., Ratnikova, L., Berger, J., 1992. Peculiarities of surfacewave propagation across central Eurasia. Bull. Seism. Soc. Amer. 82, 2464–2493. Li, Y.-G., Vidale, J.E., 1996. Low-velocity fault-zone guided waves: numerical investigations of trapping efficiency. Bull. Seismol. Soc. Amer. 86, 371–378. Martin, S., Rietbrock, A., Haberland, C., 2003. Guided waves propagating in subducted oceanic crust. J. Geophys. Res. 108 (11), 2536, doi: 10.1029/2003JB002450. 29 Matsuzawa, T., Umino, N., Hasegawa, A., Takagi, A., 1986. Upper mantle velocity structure estimated from PS-converted wave beneath the north-eastern Japan Arc. Geophys. J.R. Astr. Soc. 86, 767–787. Molnar, P., Gray, D., 1979. Subduction of continental lithosphere: some constraints and uncertainties. Geology 7, 58–62. Peacock, S.M., 1990. Fluid processes in subduction zones. Science 248, 329–337. Peacock, S.M., 1993. The importance of blueschist → eclogite dehydration in subducting oceanic crust. Geol. Soc. Amer. Bull. 105, 684–694. Peacock, S.M., 2001. Are the lower planes of double seismic zones caused by serpentine dehydration in subducting oceanic mantle? Geology 29, 299–302. Plafker, G., Gilpin, L.M., Lahr, J., 1994. Neotectonic map of Alaska. In: Plafker, G., Berg, H.C. (Eds.), The Geology of Alaska, The Geology of North America. Geology Society of America, Boulder, Colorado, Plate 12. Press, W.H., Flannery, B.P., Tekolsky, S.A., Vetterling, W.T., 1986. Numerical Recipes: The Art of Scientific Computing. Cambridge University Press, New York, p. 818. Rubie, D.C., 1990. Role of kinetics in the formation and preservation of eclogites. In: Carswell, D.A. (Ed.), Eclogite Facies Rocks. Blackie, Glasgow, pp. 111–140. Rüpke, L.H., Phipps-Morgan, J., Hort, M., Connolly, J.A.D., 2002. Are the regional variations in Central American arc lavas due to differing basaltic versus peridotitic slab sources of fluids? Geology 30, 1035–1038. Schmidt, M.W., Poli, S., 1998. Experimentally based water budgets for dehydrating slabs and consequences for arc magma generation. Earth Planet. Sci. Lett. 163, 361–379. Ulmer, P., Trommsdorf, V., 1995. Serpentine stability to mantle depths and subduction-related magmatism. Science 268, 858–861. van der Hilst, R.D., Sneider, R., 1996. High-frequency precursors to P wave arrivals in New Zealand: implications for slab structure. J. Geophys. Res. 101, 8473–8488. van Keken, P.E., Kiefer, B., Peacock, S.M., 2002. High-resolution models of subduction zones: Implications for mineral dehydration reactions and the transport of water into the deep mantle. Geochem. Geophys. Geosys. 3. Vidale, J.E., 1990. Finite-difference calculation of traveltimes in three dimensions. Geophysics 55, 521–526. Wang, C.Y., Herrmann, R.B., 1980. A numerical study of P-, SV-, and SH-wave generation in a plane layered medium. Bull. Seism. Soc. Am. 70, 1015–1036. Wessel, P., Smith, W.H.F., 1991. Free software helps map and display data. Eos Trans. AGU 72, 441. Williams, Q., Hemley, R.J., 2001. Hydrogen in the deep earth. Annu. Rev. Earth Planet. Sci. 29, 365–418. Yuan, X., et al., 2000. Subduction and collision processes in the Central Andes constrained by converted seismic phases. Nature 408, 958–961. Zhao, D., Matsuzawa, T., Hasegawa, A., 1997. Morphology of the subducting slab boundary in the northeastern Japan arc. Phys. Earth Planet. Int. 102, 89–104.