Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
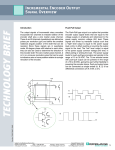
A Taxonomy of Motion Control Encoder Technologies There are many choices for tracking the speed and position of a motor shaft—important in a vast array of widely different applications, so some guidelines are required to choose the right one. by Foo Hong Thong, Avago Technologies Motion control encoders are used for position and velocity sensing in a wide range of applications from printers, copiers and scanners to servo and stepper motor feedback systems, robotic arms, wafer-handling machines and medical devices. This class of device includes electromechanical, magnetic, capacitive, inductive and optical solutions. The selection of the right motion encoder for the application is a classic example of engineering optimization of many factors including size, weight, accuracy, speed, power and cost. Types of Encoders Encoders aren’t the only approach to measuring motion. Resolvers are also an option. These are electromechanical devices with a mechanical design similar to a motor (or revolving transformer), that are quite heavy, have limited interchangeability and produce an analog (sine-wave) output for position and velocity sensing. In contrast, encoders are lighter, have considerable interchangeability and have an inherently digital output. Depending on the application, motion control encoders use electromechanical, magnetic, capacitive and optical technologies to satisfy application requirements. Common specifications for encoders include resolution specified as pulses per revolution (PPR) or counts per revolution (CPR) and output type. However, several other criteria must be considered in the final decision including, operating environment, materials, noise immunity, inertia, reliability, life expectancy and more. Electromechanical encoders use a series of sliding contacts attached to a stationary portion. Each contact wipes against a rotating metal disc at a different distance from the shaft. These designs commonly generate six pulses per revolution (PPR) but designs with up to 36 PPR are not uncommon. Speed and mechanical wear of the contacts are typical design concerns. However, thumbwheel measurements easily fit within these constraints. Common applications include level, cursor, frequency, temperature, time, volume, tone and tuner controls. For magnetic encoders, a permanent magnet is firmly mounted on the rotating shaft of a motor or strips of magnetized material are attached to a disk. The output signals are obtained typically by Hall effect or magnetoresistive (MR) sensors. Since magnetic encoders have non-contact operation, mechanical wear is not a design consideration. Typically Hall sensor-based magnetic encoders provide 10 to 13-bits of resolution to address different application needs. Packaging the magnetic IC and magnet within a single housing simplifies assembly and integration into applications by eliminating the process of aligning the encoder against the rotation shaft of the motor. Efforts can then be taken to further increase the resolution of the magnetic encoders from 10 bits to 16 bits. Figure 1 provides an example of an incremental magnetic encoder in a molded plastic housing. The encoder provides up to 256 CPR and has a maximum rotating speed of 12,000 rpm mechanical and 7,000 rpm electrical. Magnetic encoders can withstand a variety of application hazards including dust, dirt, water, oil and wide temperature cycles. As a result, they help provide long life and highly reliable measurements. Typical applications include: test and measurement equipment, security surveillance, white goods, cable and satellite dishes, toys, gaming machines, oil dispenser machines, textile equipment, actuators, pumps and many more. Capacitive encoders transmit an AC field with a fixed frequency past a patterned rotor to a field receiver using capacitive rather than magnetic sensing. This class of encoders can take advantage of applicationspecific integrated circuit (ASIC) technology to convert the output pulses. Some products have programmable resolution ranging from 48 to 2048 PPR. The capacitive technique provides very low current consumption but is not widely available. Like to magnetic encoders, the components can be assembled into a single package to simplify their usage. Optical encoders use visible or infrared (IR) LEDs as a light source and light receiving phototransistors or photodiodes as detectors. A code wheel with interspaced slots and solid areas interrupts or commutates the flow of light. As the light passes through the slots on the moving code wheel, it creates alternate light and dark patterns. Where a dark area is detected, a low state (0) is created. When the light successfully penetrates the slot, a high state (1) is created. The position of the shaft is detected by reading the pattern of 1’s and 0’s. Similar to magnetic and capacitive encoders, the components of the optical encoder can easily be assembled into a single package to simplify their usage. Table 1 shows a summary comparison of encoder technologies. The comparisons are for consumer or commercial applications, where the encoder attaches to a printed circuit board (PCB), and not for harsh industrial applications that would have a much broader and, in some cases, much different ratings for many parameters. In addition to the parameter comparison shown in Table 1, optical encoders are attractive due to the industry’s ability to continue to shrink the form factor and reduce the weight and the range of products that are available that make optical encoders extremely flexible and widely used. Typical applications for optical encoders include the factory and industrial automation industry such as robotic arms, valve controls, test and measurement equipment as well as printers, copiers, card readers, scanners, digital still cameras, camcorders, camera phones, projectors and other consumer products. Optical Encoder Selection Criteria Once it’s determined, for example, that an optical encoder is the right choice for the application, several other decision factors come into play. These include: linear vs. rotary (or shaft), absolute vs. incremental, multi-turn vs. single turn and reflective vs. transmissive designs. The easiest choice is linear or rotary, since the application essentially determines this. However, unless selecting an encoder is performed routinely, the other design options need additional details. The first level of output differentiation for encoders is absolute versus incremental. However, as Table 2 indicates, there are several other classifications. Incremental encoders provide relative position, where the feedback signal is always referenced to a start or home position and each mechanical position is uniquely defined. This type of encoder provides a pulse for each increment of shaft movement, so the current position is an increment from the previous position and is indicated by a quadrature output device. Quadrature output also applies to other encoder types so it needs further explanation. With quadrature output, the signals from two channels are offset by 90 degrees. These signals can be read on any edge. Direction information can easily be obtained from the quadrature output. When the codewheel moves in one direction, Channel A leads Channel B. In contrast, when the codewheel passes in the other direction, Channel B leads Channel A. The addition of an indexing pulse, as shown in Figure 2, allows the encoder to observe four states in a single cycle. Optical incremental encoders are used extensively as position (rotary and linear) feedback devices due to their durability and ability to achieve high resolution. For example, the AEDB-9140 has two channel quadrature outputs plus a third channel index output. This index output is a 90 electrical degree high true index pulse, which is generated once for each full rotation of the codewheel. The result is a three-channel encoder. Due to a highly collimated light source and a unique photodetector array, these modules are extremely tolerant to mounting misalignment. Unlike incremental encoders, absolute encoders generate a unique code for each position. When power is initially applied, absolute encoders do not require a home cycle—even if the shaft was rotated while the power was switched off. Absolute encoders come in two categories, single-turn and multi-turn and are offered in a variety of resolutions (e.g., up to 23-bit for single-turn and 16-bit for multi-turn available in the market). Compact absolute encoder modules are easily integrated in to space-constrained applications. Single-turn encoders can be designed with an integrated chip or by using an array of photodiodes. Coupled with a highly collimated light source and a uniquely patterned code wheel, these encoders provide a high resolution output for positional information, typically through a serial data output, e.g. serial synchronous interface (SSI) or the open source protocol bidirectional communication interface for industrial automation (BiSS ). These encoders provide unique positional information for each shaft location. This location is independent from all other locations. In an absolute single-turn encoder application, there are several tracks with common centers and a single light source. For higher resolution single-turn encoders, incremental tracks are added. These tracks enable the interpolation of signals. In addition, these single-turn encoders’ use of the non-proprietary serial communication protocol allows them to match the output requirements of most applications that require end-to-end communication. Absolute single-turn encoder modules come in a package that is simple to assemble and addresses the needs of a range of applications in the factory and industrial automation industry such as robotic arms, valve controls, test and measurement equipment and more. Multi-turn absolute encoder modules are optoelectronic/mechanical units that consist of an IR-LED circuit board, a phototransistor circuit board, and gear head code wheels. This construction method enables the multi-turn encoders to provide absolute multi-turn positioning information without the need for a battery to backup the power supply in the event of power failures or sudden stoppage. Multiple turns are achieved by placing the multi-turn gear-head module to the primary high-resolution code wheel and single-turn encoder module. High reliability and consistency in providing highly accurate absolute information for multiple revolutions are among the top criteria to look for in these types of encoders. Multi-turn module resolution of 12-bits and 14-bits make multiple turn absolute encoders applicable for a wide range of applications. These encoders are commonly used in industries requiring linear positioning, such as the X&Y Positioning Tables, found in medical institutions and hospitals; pitch and yaw controls, in wind turbines; valve controls; solar tracking; and factory automation equipment. Reflective Versus Transmissive Encoders A range of optical encoders that are easily matched with compatible code wheels (such as glass, metal, mylar and plastic) ensures convenience, efficiency, optimum performance and cost effectiveness for a variety of applications. The different designs are classified as reflective or transmissive. With a reflective optical encoder (Figure 3), the reflective area (window) of the codewheel (or codestrip) reflects light back to the photodetector IC that is mounted in line with the LED source. No light is reflected by the non-reflective area (bar). Alternating light and dark patterns corresponding to the window and bar fall on the photodiodes as the codewheel rotates and the encoder’s detector circuitry produces digital outputs representing the rotation of the codewheel. Figure 4 shows an optical encoder that uses reflective technology and combines an emitter and a detector in a single surface-mount leadless package. In a transmissive encoder, the light is collimated into a parallel beam through a single polycarbonate lens located directly over the LED. The integrated detector circuit is mounted opposite the emitter. As the code wheel passes between the emitter and detector, the light beam is interrupted by the pattern of spaces and bars on the codewheel. The photodiode detectors are spaced so that a light period on one pair of detectors corresponds to a dark period on the adjacent pair of detectors. The form factor of the reflective encoder (single plane) versus the transmissive encoder (codewheel passes through a groove) is one of the factors that dictate the choice of one technology over the other. As the number of motor controls increases to satisfy the needs of many new applications in consumer, commercial and industrial applications, designers’ decisions will continue to proliferate for the most appropriate encoder technology. Increasingly smaller and lighter-weight encoders with very high precision and accuracy will continue to make optical encoders a widely accepted and frequently preferred technology of choice for these applications. New designs that combine emitters and detectors in very small surface-mount packages will be among the many reasons to evaluate optical encoders. For example, new encoder technology will integrate an index channel to the two existing channels of digital output. In addition, the next-generation encoder will feature a built-in interpolator that allows users to set the interpolation factors to one, two or four times the base resolution of 304LPI. Avago Technologies, San Jose, CA. (800) 235-0312. [www.avagotech.com]