Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
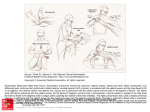
THE ANGULAR DAMPING COEFFICIENT OF THE IN VIVO HUMAN KNEE JOINT Steve McFaull1 and Mario Lamontagne1,2 School of Human Kinetics1 and Department of Anatomy and Neurobiology2 University of Ottawa, Ottawa, Ontario, Canada INTRODUCTION Muscle force prediction models (e.g., Davy and Audu, 1987) are constructed in an attempt to predict the force contribution of individual muscles crossing a joint during a specific movement pattern. It has been hypothesized that the passive structures spanning a joint may also contribute to or oppose the net joint moment and possibly should be included in a model to enhance its fidelity (Winter, 1990; Hatze, 1976). Omission of the passive moments may be acceptable during the midrange of joint motion, however as the mechanical limits of a joint are approached the passive moments become increasingly important. Very little data exists in the literature regarding the moments which arise due to the viscosity of the passive structures spanning the knee joint during full range flexion-extension. Hatze (1975a) determined the angular damping coefficient of the knee joint for one male subject using the small oscillation technique. The damping coefficient was found to be a nonlinear function (parabolic) of the knee joint angle. The purpose of the present investigation was to determine the angular damping coefficient of the knee joint as a function of knee joint angle for a sample of normal subjects. METHODS Seventeen male subjects between the ages of 22 and 31 years volunteered for this study. The small oscillation method as described by Hatze (1975, 1975a) was used to determine the damping coefficient of the knee at joint angles of 10º, 45º, 90º, 110º, and 130º. The length of the biarticular muscles was held constant by fixing the hip joint at 90º and the ankle joint at 0º (neutral). To ensure the passive state the surface EMG activity of the main extensors and flexors of the leg was recorded during the testing. Five oscillation trials were recorded from each subject at each knee angle. A strain gage loadcell (Intertechnology) was used to record the amplitude decay of the oscillations. The loadcell signal was A/D converted at 500 Hz and subsequently low pass filtered (fc=4 Hz). The time period and logarithmic decrement of the underdamped oscillations were determined and the equations given by Hatze (1975) were used to calculate the damping coefficients. The elastic stiffness data was obtained from a separate experiment (refer to the abstract by the same authors also included in these proceedings). RESULTS AND DISCUSSION Figure 1 depicts the mean damping function within the ± 1 standard deviation envelope. The angular damping function is approximately quadratic in nature. On average, the damping coefficient reaches a minimum at 90º, although some subjects (4) exhibited minimum values at 45º. Overall, the data of Hatze (1975a) is somewhat larger in magnitude than the average data observed in this investigation; although considerable variation exists in the data of the present study especially at 130º. The quadratic nature of the damping function is most likely due to the fact that passive structures (ligaments, joint capsule, etc.) are being added and/or strained as the limits of the joint are approached. The moments produced by the viscosity of the joint are determined by multiplying the damping coefficient by the angular velocity of the leg (in rad/s). For example, if the angular velocity is 10 rad/s the passive viscous moment at 10º would be about 13 N.m. Sincel the small oscillation method is a linear approximation, the values of the damping coefficients presented in this study probably represent the upper limits since at higher velocities the viscosity of the passive tissues decreases due to the nonnewtonian (thixotropic) characteristics of biological tissues and fluids (Fung, 1981). In summary, the passive moments which arise due to the viscosity of the knee joint may be significant in magnitude especially for movements in which the knee joint approaches its limits and the Figure 1. Mean angular damping coefficient of magnitude of the net joint moment the knee joint as a function of joint angle. is relatively small - such as during Dotted lines are ± 1 S.D. the late swing phase of gait. If a portion of the observed net joint moment could be satisfied passively, this will have implications in the magnitudes of the predicted muscle forces. REFERENCES Davy, D.T., and Audu, M.L. (1987). Journal of Biomechanics, 20(2), 187-202. Fung, Y.C. (1981). Biomechanics: Mechanical Properties of Living Tissues. New York: Springer-Verlag. Hatze, H. (1975). European Journal of Applied Physiology, 34, 217-226. Hatze, H. (1975a). Ph.d. Thesis. University of South Africa. Hatze, H. (1976). Mathematical Biosciences, 28, 99-135. Winter, D.A. (1990). Biomechanics and Motor Control of Human Movement (2nd ed.). New York: John Wiley and Sons. ACKNOWLEDGEMENTS This study was partly funded by the Natural Sciences and Engineering Council and the Research Committee of the University of Ottawa.