Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
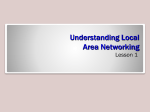
GigE Vision Interfaces Deliver Higher Performance for Machine Vision Systems The increasing performance and density of today’s vision systems is placing demands on bandwidth and preprocessing. Higher speed 10 GigE Ethernet interface devices and FPGAs for preprocessing vision data can increase the ease and reduce the cost of upgrades. by John Phillips, Pleora Technologies As price pressures increase due to global competitiveness and economic retraction, productivity remains an evergreen focus for the manufacturing industry. Machine vision, with its ability to emulate and even supersede the human eye in a manufacturing process, has long been considered a means for achieving greater productivity. In the early 1990s, efforts to integrate machine vision were, however, largely disappointing since they were plagued by complex programming requirements, difficult installations, mediocre functionality, vendor-specific interfaces and low reliability. The promise of enhanced quality and productivity, however, kept the desire for machine vision alive, particularly in the semiconductor and electronics manufacturing sectors. In time, products matured, functionality increased and the cost and complexity of machine vision systems came down. Today, virtually all sectors of manufacturing have adopted machine vision systems – from food processing and paper inspection to metal fabrication and pharmaceuticals. Machine vision offers important advantages over human vision in terms of cost, speed, precision and physical demands. A machine vision system can verify if an object meets a quality standard using a variety of activities: Determining location, orientation and position; Measuring dimensions within thousandths-of-an-inch accuracy; Counting items such as pills in a bottle; or Inspecting and identifying flaws. The sophistication of quality inspection systems has grown to such a degree that they can offer manufacturers 100 percent inspection rate, reduced operating costs, shorter time from production to market, less waste, and fewer manpower requirements. With such attractive benefits, it’s no surprise that manufacturers are keen to further capitalize and enhance the performance of their quality inspection systems. External market conditions are also influencing this desire for ever-growing performance levels. Recent and emerging regulatory requirements, particularly in the food and pharmaceutical sectors, are resulting in a need for more elements to inspect as well as deeper levels of inspection. To avoid escalating inspection costs, next-generation machine vision systems will employ higher resolution cameras and will not only need to process data faster, but also process data for a single object from multiple data sources. For example, a pill could be inspected from 1 multiple camera angles using multispectral imaging as well as through the use of visible light imaging. High-performance, Ethernet-based video interfaces and in-line FPGA image processing are two of the tools available to today’s vision system designer that allow him/her to enhance the flexibility and performance of quality inspection systems. When these are used in combination, designers can optimize the use of overall system resources by bringing basic image processing routines closer to the point of image capture, and by efficiently distributing or consolidating the remaining processing tasks using a high-performance video network. High-Performance Video Networks Real-time functionality in quality inspection systems is often achieved using a direct link. This, however, limits the topology to point-to-point connections between a vision sensor and an image capture board or frame grabber in a PC (Figure 1). There are often advantages to being able to view images on more than one display or process them on more than one PC. However, this requires the configuration of additional point-to-point connections on extra PCs, display controllers and other pieces of specialized hardware. Consequently, point-to-point connections – used in machine vision-centric interfaces such as Camera Link and CoaXPress - can be costly to install, difficult to manage and expensive to scale. Moreover, as sensors continue to evolve to higher resolutions and faster frame rates, the high bandwidth needed for real-time image transfer becomes a limiting factor. Ethernet, on the other hand, offers exceptional networking flexibility, supporting almost every conceivable connectivity configuration, including point-to-point, star (point-to-multipoint), and mesh (multipoint-to-multipoint). As the primary standard deployed in most of the world’s networks, including those for demanding military and industrial applications, Ethernet is supported by a well-understood infrastructure based on cost-effective and non-proprietary chip sets, switches and cabling. Gigabit Ethernet, the widely deployed third generation of the standard, delivers 1 Gbit per second, while the fourth generation, 10 GigE, delivers ten times that speed. Additionally, different traffic rates between 10 Mbit/s up to 10 Gbit/s can be handled by the same switch, ensuring backward compatibility and permitting system upgrades without sacrificing legacy cameras already in place. The cost savings that come with using standard, off-the-shelf Ethernet components are an attractive add-on benefit to Ethernet’s greater design flexibility, which allows more—and simpler—configuration and distribution options. The GigE Vision Standard 2 Initially, interest from the machine vision sector centered on Ethernet’s ability to offer longer cable reach than the common interfaces of the day. Ethernet allows spans of up to 100 meters between network nodes over standard, low-cost Cat 5/6 copper cabling, and much greater distances with switches or fiber. More recently, the ability to build high-performance video networks has been recognized as a dominant advantage, offering the flexibility to combine various image acquisition and processing elements, connected through a variety of network topologies. The potential benefits of Ethernet for industrial vision applications led to the 2006 introduction of GigE Vision, a global open standard governing the distribution of video and control data over Ethernet networks. It establishes a standardized environment for the delivery of networked video applications based on switched client/server Ethernet architectures. Figure 2 shows an example of a GigE Vision enabled quality inspection system. The standard defines four main areas that are specific to machine vision networked systems (Figure 3). Importantly, GigE Vision leverages about 25 existing industry standards rather than introducing proprietary schemes. These include IEEE 802.3 (Ethernet), IEEE 1588 (time synchronization), IETF RFC2026 (jumbo frames) and EMVA GenICam (XML device description file). The recent inclusion of 40 GigE and 100 GigE in the IEEE 802.3 standard is a significant indicator of the expected long-term investment in Ethernet networks. Market studies show that the number of 1G, 10G, 40G and 100G network ports shipped on service provider and enterprise equipment in 2010 jumped 43 percent. Also of significance is that the Ethernet access device market is forecast to grow at an 18 percent compound annual growth rate from 2010 to 2015 as a direct reflection of growing Ethernet connections. This is a strong endorsement of the future of Ethernet networked technology. While the deployment of other non-networked technologies appears to be flat or in decline, Ethernet’s healthy outlook bodes well for the next generation of networked vision applications. With the release of the latest update to the standard, GigE Vision 2.0, formal support for mixed GigE and 10 GigE networks is provided. This provides two major advantages to system designers that leverage the GigE Vision standard: modular expansion of existing systems to accommodate higher-resolution and/or faster frame rates, with little to no rework of existing processing software. Using switches from a variety of big-name manufacturers (Cisco, Juniper, D-Link and others), a mix of GigE and 10 GigE equipment can be reliably used in the same system. Devices that convert legacy camera interfaces—such as Camera Link—into GigE Vision are also widely available, providing additional flexibility where needed. 3 During an upgrade, an Ethernet system using GigE software and drivers can be largely, if not entirely, migrated up to 10 GigE. The elimination of software redevelopment or purchase dramatically brings down the cost, as well as reduces the complexity of migrating to a higher performing system. In addition to re-using software and drivers, GigE cameras can also be easily re-employed and 10 GigE interfaces brought on-line on an as-needed basis. Last but not least, FPGA architectures also remain largely unaffected during an upgrade, with clear migration paths from one FPGA family to another. With an Ethernet-based quality inspection system, one can avoid the “forklift” upgrades common to interfaces which are backwards-compatible in name only. Owners of quality inspection systems who are seeking higher performance levels can use the benefits provided by Gigabit Ethernet to increase the performance of new and existing machine vision systems. However, it is inevitable that performance requirements will continue to grow, rather than retract, and Ethernet-based systems (both 1 GigE and 10 GigE) are ideal for futureproofing, with simple migration possible on the hardware, software and system component level. As they continue to evolve, video networks incorporating the GigE Vision standard will serve as important technology platforms for machine vision applications, enabling real-time display, processing and storage. Their broad range of attributes appeals to many manufacturers due to the advantages of versatile system design, universal adoption, and cost-effective infrastructure. Further, the GigE Vision interface offers excellent interoperability and international standardization. In-Line Image Processing and Control using FPGAs In comparison to traditional machine vision systems, a GigE Vision-based system requires no PC-based frame grabber. While this means that no image capture hardware is required on the (PC) receive side, real-time system-level requirements remain. To meet these requirements, highly-tuned software and drivers can help on the PC side, while FPGAs can help on the camera side. In fact, there are two often-overlooked areas in which FPGAs can play a vital role. The first is in pre-processing at the camera level. Five years ago, the amount of bandwidth needed to stream data in real time from a high-performance image sensor seldom exceeded 1 Gigabit per second. Since then, improvements in semiconductor processes and circuit design have yielded steady increases in sensor densities and frame rates. In many cases, it is not necessary - or even desirable - to have all of this data sent across the Ethernet link to the PC. For this reason, many camera manufacturers are choosing to add pre-processing capabilities into their cameras. These capabilities include laser triangulation and edge detection. Due to the high throughput and determinism requirements of most quality inspection systems, these tasks are not well-suited to a microcontroller or a DSP. With pre-processing taking place at the camera-level, the PC is relieved of these tasks and can then concentrate on analyzing the object’s quality. 4 The second area in which FPGAs can play a critical role in optimizing a system’s performance is the triggering aspect. Newer line scan cameras operate at 100 KHz (100,000 lines per second). Triggering, which ensures that all cameras looking at an object capture imagery at precisely the same time, must be done with sub-millisecond accuracy. Certainly a PC cannot achieve this, and while this was typically done by an FPGA on the frame grabber, this aspect of control is now the domain of the camera. IEEE 1588 and GigE Vision protocols are implemented in the FPGA to achieve this level of precision timing and accuracy. With pre-processing and triggering, we can see that FPGAs are increasingly doing more at the camera level. At the same time, cameras are getting smaller and are required to use power-over cable technologies, such as Power over Ethernet (PoE), which has a maximum of 13W. However, this maximum might be restated to 7W or less in order to keep the camera size as small as possible. To overcome these challenges while still optimizing performance, low power FPGAs, such as Altera’s Cyclone family, can be integrated into the system’s cameras. The vision system designer of today is tasked to constantly increase performance while lowering cost. While this same designer might have a box full of tools, it can often be difficult to determine which tool or combination of tools will prove most effective for achieving these goals —especially over the long-term. The selection of high-performance, Ethernet-based video interfaces and IP, as well as in-line FPGA image processing, are a practical place to start. When used in combination with a long life cycle FPGA like Cyclone V FPGAs, designers can optimize the use of overall system resources by bringing basic image processing routines closer to the point of image-capture, and by efficiently distributing or consolidating the remaining processing tasks using a high-performance video network, as illustrated by Figure 2. Furthermore, with the use of FPGA, Ethernet-based systems can scale with increasing video bandwidth and preprocessing performance and can be seamlessly migrated from 1 GigE to 10 GigE, which significantly extends the lifespan of a system. Pleora Technologies, Katana, ON, Canada. (613) 270 0625. [www.pleora.com]. 5