Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrification wikipedia , lookup
Opto-isolator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Mains electricity wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Second Industrial Revolution wikipedia , lookup
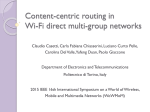
INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 1 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 1. INTRODUTION AND LITERATURE SURVEY: 1.1. INTRODUCTION Human operators have difficulty driving cranes quickly, accurately and safely because the heavy structure of the cranes responds slowly and its payload oscillates. Manipulation difficulty is increased by non-intuitive control interfaces that require substantial experience to master. This project presents a new type of interface that allows operators to drive crane by simply moving human fingers with gloves on it. Basically in our project we are going to control industrial crane using android application which is design by internet of things. In andriod application, design wifi connection to connect wifi module. Basically, the goal is that can control industrial crane using andriod application. We will design andriod application in eclipse software. Once it is built and working, we will control dc motor using Arduino and wifi module for crane. FIG. 1.1.Crane BVM, V.V.NAGAR Page 2 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 FIG.1.2. ESP – 8266 Wi-Fi Module Human gestures are undoubtedly natural. They may often prove more efficient and powerful as compared to other modes of interaction. Gesture recognition has been proposed to understand the action of a hand. Humans and machines do not interface well. In an attempt to bridge the gap between humans and the systems they interact with, a plethora of input methods have been devised: keyboards, mice, joysticks, game controllers, and devised: keyboards, mice, joysticks, game controllers, and of these devices remove the barrier between man and machine. The objective of this project is to design a android application. Depending upon the button of the application, the required object is moved. This method ensures effective communication. The goal of the project is to design a useful and fully functional real world system that efficiently translates android application logic into movement of objects. This project is based on helping various mega-factories and industries to help them complete their work easy and faster The most common thing that people do when frustrated with devices is perform hand gestures to try to show the device what they want it to do. Microcontroller gets the signal from the wifi module and based on the signal controller control the dc motor. The device seems to do BVM, V.V.NAGAR Page 3 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 what the user wants, as though a direct line of communication exists between the user and the hardware to be controlled The old way of thinking: machines are there to do the sorts of work that users didn’t want to do, like a dishwasher or a Roomba. The new way of thinking: machines are here to help us do the things that we want to do, but are not able to, like a construction yard crane. If users could reach a level of comfort with machines, as though using them was no more than using an extension though using them was no more than using an extension of their own bodies, perhaps they could get to a point where they thought of themselves as the ones. 1.2 LITERATURE SURVEY: A crane is a type of machine, generally equipped with a hoist, wire ropes or chains, and sheaves, that can be used both to lift and lower materials and to move them horizontally. It is mainly used for lifting heavy things and transporting them to other places. It uses one or more simple machines to create mechanical advantage and thus move loads beyond the normal capability of a man. Cranes are commonly employed in the transport industry for the loading and unloading of freight, in the construction industry for the movement of materials and in the manufacturing industry for the assembling of heavy equipment. The first construction cranes were invented by the Ancient Greeks and were powered by men or beasts of burden, such as donkeys. These cranes were used for the construction of tall buildings. Larger cranes were later developed, employing the use of human tread wheels, permitting the lifting of heavier weights. In the High Middle Ages, harbor cranes were introduced to load and unload ships and assist with their construction – some were built into stone towers for extra strength and stability. The earliest cranes were constructed from wood, but cast iron and steel took over with the coming of the Industrial Revolution. Following is the diagram of the first simple crane constructed in the ancient time BVM, V.V.NAGAR Page 4 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 FIG. 1.3. Crane Model BVM, V.V.NAGAR Page 5 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 6 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 2. BLOKDIAGRAMS & COMPONENTS DETAILS: 2.1 BLOCK DIAGRAMS: FIG 2.1 Block Diagram of the Project DESCRIPTION: Power supply: The power supply section consist of step down transformers of 230V primary to 5Vsecondary voltage for the +5V power supply .The circuit provides variable 12V to the motor drivers. Microcontroller: ATMega 328 The ATMega 328P is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the ATMega BVM, V.V.NAGAR Page 7 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 328P achieves throughputs approaching 1 MIPS per MHz allowing the system designed to optimize power consumption versus processing speed. ESP8266 – Wi-Fi: ESP8266 is highly integrated circuit consists of a 32bit RISC processor. ESP8266 also includes a built in 802.11 b/g/n WiFi circuit that is ready to be directly connected to an antenna. The ESP8266 is currently available only in a 32pin QFN package, and there is just one IC in the family. The ESP01 module contains the ESP8266 MCU and a flash memory chip. There are two LED's: a red one which indicates power is connected to the module, and a blue one which indicates data flow, and can also be controlled by user programming. The WiFi antenna is the PCB trace that covers the top of the module. It is called a Meandered Inverted-F Antenna (MIFA,) is surprisingly efficient, and only mildly directional. 2.2 COMPONENT LIST Microcontroller ATmega 328 Wifi Module – ESP8266 Power supply BVM, V.V.NAGAR Page 8 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Motor driver IC DC gear motor Year: 2015-16 2.2.1. MICROCONTROLLER ATMEGA 328 ARCHITECTURE OF ATMGA 328 The Atmega 328P is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the ATmega 328P achieves throughputs approaching 1 MIPS per MHz allowing the system designed to optimize power consumption versus processing speed. Architecture is more code efficient while achieving throughputs up to ten times faster than conventional CISC microcontrollers. The ATMega328P provides the following features: 32K bytes of In-System Programmable Flash with Read-While-Write capabilities,1K bytes EEPROM,2K bytes SRAM, 23 general purpose I/O lines, 32 general purpose working registers, three flexible Timer/Counters with compare modes, internal and external interrupts, a serial programmable USART, a byte-oriented 2-wire Serial Interface, an SPI serial port, a 6-channel 10-bit ADC (8 channels in TQFP and QFN/MLF packages), a programmable Watchdog Timer with internal Oscillator, and five software selectable power saving modes. The Idle mode stops the CPU while allowing the SRAM, Timer/Counters, USART, 2-wire Serial Interface, SPI port, and interrupt system to continue functioning. The Power-down mode saves the register contents but freezes the Oscillator, disabling all other chip functions until the next interrupt or hardware reset. In Powersave mode, the asynchronous timer continues to run, allowing the user to maintain a timer base while the rest of the device is sleeping. The ADC Noise Reduction mode stops the CPU and all I/O modules except asynchronous timer and ADC, to minimize switching noise during ADC conversions. In Standby mode, the crystal/resonator Oscillator is running while the rest of the device is sleeping. This allows very fast start-up combined with low power consumption. BVM, V.V.NAGAR Page 9 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Fig 2.2 Architecture of ATmega 328 The device is manufactured using Atmel’s high density non-volatile memory technology. The On-chip ISP Flash allows the program memory to be reprogrammed In-System through an SPI serial interface, by a conventional non-volatile memory programmer, or by an On-chip Boot program running on the AVR core. The Boot program can use any interface to download the application program in the Application Flash memory. Software in the Boot Flash section will continue to run while the Application Flash section is updated, providing true ReadWhile-Write operation. By combining an 8-bit RISC CPU with In-System Self-Programmable Flash on a monolithic chip, the Atmel ATmega48PA/88PA/168PA/328P is a powerful BVM, V.V.NAGAR Page 10 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 microcontroller that provides a highly flexible and cost effective solution to many embedded control applications. The ATmega 328P AVR is supported with a full suite of program and system development tools including: C Compilers, Macro Assemblers, Program Debugger/Simulators, In-Circuit Emulators, and Evaluation kits. PIN DIAGRAM OF ATMEGA-328: Fig 2.3 Pin Diagram PIN DESCRIPTION : VCC - Digital Supply Voltage GND – Ground Port B (PB7:0) XTAL1/XTAL2/TOSC1/TOSC2 Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port B output buffers have symmetrical drive characteristics with both high sink and Source BVM, V.V.NAGAR Page 11 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 capability. As inputs, Port B pins that are externally pulled low will source current if the pull-up resistors are activated. The Port B pins are tri-stated when a reset condition becomes active, even if the clock is not running. Depending on the clock selection fuse settings, PB6 can be used as input to the inverting Oscillator amplifier and input to the internal clock operating circuit. Depending on the clock selection fuse settings, PB7 can be used as output from the inverting Oscillator amplifier. If the Internal Calibrated RC Oscillator is used as chip clock source, PB7..6 is used as TOSC2..1 input for the Asynchronous Timer/Counter2 if the AS2 bit in ASSR is set. Port C (PC5:0) Port C is a 7-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The PC5..0 output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port C pins that are externally pulled low will source current if the pull-up resistors are activated. The Port C pins are tri-stated when a reset condition becomes active, even if the clock is not running. PC6/RESET If the RSTDISBL Fuse is programmed, PC6 is used as an I/O pin. Note that the electrical characteristics of PC6 differ from those of the other pins of Port C. If the RSTDISBL Fuse is unprogrammed, PC6 is used as a Reset input. A low level on this pin for longer than the minimum pulse length will generate a Reset, even if the clock is not running. Shorter pulses are not guaranteed to generate a Reset. Port D (PD7:0) Port D is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port D output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port D pins that are externally pulled low will source current if the pull-up resistors are activated. The Port D pins are tri-stated when a reset condition becomes active, even if the clock is not running. AVCC BVM, V.V.NAGAR Page 12 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 AVCC is the supply voltage pin for the A/D Converter, PC3:0, and ADC7:6. It should be externally connected to VCC, even if the ADC is not used. If the ADC is used, it should be connected to VCC through a low-pass filter. Note that PC6..4 use digital supply voltage, VCC. AREF AREF is the analog reference pin for the A/D Converter. ADC7:6 (TQFP and QFN/MLF Package Only) In the TQFP and QFN/MLF package, ADC7:6 serve as analog inputs to the A/D converter. These pins are powered from the analog supply and serve as 10-bit ADC channels. FEATURES OF ATMEGA 328 : High Performance, Low Power AVR® 8-Bit Microcontroller 1. Advanced RISC Architecture 131 Powerful Instructions – Most Single Clock Cycle Execution 32 x 8 General Purpose Working Registers Fully Static Operation Up to 20 MIPS Throughput at 20 MHz On-chip 2-cycle Multiplier 2. High Endurance Non-volatile Memory Segments 4/8/16/32K Bytes of In-System Self-Programmable Flash program memory (ATmega48PA/88PA/168PA/328P) 256/512/512/1K Bytes EEPROM (ATmega48PA/88PA/168PA/328P) 512/1K/1K/2K Bytes Internal SRAM (ATmega48PA/88PA/168PA/328P) Write/Erase Cycles: 10,000 Flash/100,000 EEPROM Data retention: 20 years at 85°C/100 years at 25°C Optional Boot Code Section with Independent Lock Bits In-System Programming by On-chip Boot Program True Read-While-Write Operation Programming Lock for Software Security BVM, V.V.NAGAR Page 13 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 3. Peripheral Features Two 8-bit Timer/Counters with Separate Prescaler and Compare Mode One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture Mode Real Time Counter with Separate Oscillator Six PWM Channels 8-channel 10-bit ADC in TQFP and QFN/MLF package Temperature Measurement 6-channel 10-bit ADC in PDIP Package Temperature Measurement Programmable Serial USART Master/Slave SPI Serial Interface Byte-oriented 2-wire Serial Interface (Philips I2C compatible) Programmable Watchdog Timer with Separate On-chip Oscillator On-chip Analog Comparator Interrupt and Wake-up on Pin Change 4. Special Microcontroller Features Power-on Reset and Programmable Brown-out Detection Internal Calibrated Oscillator External and Internal Interrupt Sources Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, Standby, and Extended Standby 5. I/O and Packages 23 Programmable I/O Lines 28-pin PDIP, 32-lead TQFP, 28-pad QFN/MLF and 32-pad QFN/MLF 6. Operating Voltage: 1.8 - 5.5V for ATmega 328P BVM, V.V.NAGAR Page 14 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 7. Temperature Range: -40°C to 85°C 8. Speed Grade: 0 - 20 MHz @ 1.8 - 5.5V 9. Low Power Consumption at 1 MHz, 1.8V, 25°C for ATmega 328P: Active Mode: 0.2 mA Power-down Mode: 0.1 μA 10. Power-save Mode: 0.75 μA (Including 32 kHz RTC) CLASIFICATION OF AVR MICROCONTROLLERS : 1. ATmega48PA 2. ATmega88PA 3. ATmega168PA 4. ATmega328P COMPARISION OF AVR MICROCONTROLLER The ATmega48PA, ATmega88PA, ATmega168PA and ATmega328P differ only in memory sizes, boot loader support, and interrupt vector sizes. TAB LE 2.1. Comparison of AVR microcontroller BVM, V.V.NAGAR Page 15 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 ATmega88PA, ATmega168PA and ATmega328P support a real Read-While-Write SelfProgramming mechanism. There is a separate Boot Loader Section, and the SPM instruction can only execute from there. In ATmega48PA, there is no Read-While-Write support and no separate 2.2.5 ESP8266 Wi-Fi Module ESP-12E WiFi module is developed by Ai-thinker Team. core processor ESP8266 in smaller sizes of the module encapsulates Ten silica L106 integrates industry-leading ultra low power 32bit MCU micro, with the 16-bit short mode, Clock speed support 80 MHz, 160 MHz, supports the RTOS, integrated Wi-Fi MAC/BB/RF/PA/LNA, on-board antenna. Fig. ESP8266EX Block Diagram BVM, V.V.NAGAR Page 16 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 BASIC AT COMMAND OF ESP8266 Features: 802.11 b/g/n Integrated low power 32-bit MCU Integrated 10-bit ADC Integrated TCP/IP protocol stack Integrated TR switch, balun, LNA, power amplifier and matching network Integrated PLL, regulators, and power management units BVM, V.V.NAGAR Page 17 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Supports antenna diversity Wi-Fi 2.4 GHz, support WPA/WPA2 Support STA/AP/STA+AP operation modes Support Smart Link Function for both Android and iOS devices Support Smart Link Function for both Android and iOS devices SDIO 2.0, (H) SPI, UART, I2C, I2S, IRDA, PWM, GPIO STBC, 1x1 MIMO, 2x1 MIMO A-MPDU & A-MSDU aggregation and 0.4s guard interval Deep sleep power <10uA, Power down leakage current < 5uA Wake up and transmit packets in < 2ms Standby power consumption of < 1.0mW (DTIM3) +20dBm output power in 802.11b mode Operating temperature range -40C ~ 125C 2.2.5 L293D: FIG.2.12 L293D IC Introduction: The L293D motor driver is available for providing User with ease and user friendly interfacing for embedded application. L293D motor driver is mounted on a good quality, single sided non-PTH PCB. The pins of L293D motor driver IC are connected to connectors for easy access to the driver IC’s pin functions. The L293D is a Dual Full Bridge driver that can drive up to 1Amp per bridge with supply voltage up to 24V. It can drive two DC motors, relays, solenoids, etc. The device is TTL compatible. Two H bridges of L293D can be connected in parallel to increase its current capacity to 2 Amp. BVM, V.V.NAGAR Page 18 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 FIG.2.13 Pin Diagram Features: Easily compatible with any of the system Easy interfacing through FRC (Flat Ribbon Cable) External Power supply pin for Motors supported Onboard PWM (Pulse Width Modulation) selection switch 2pin Terminal Block (Phoenix Connectors) for easy Motors Connection Onboard H-Bridge base Motor Driver IC (L293D) Technical Specification: Power Supply: Over FRC connector 5V DC . External Power 9V to 24V DC Dimensional Size: 44mm x 37mm x 14mm (l x b x h) Temperature Range: 0°C to +70 °C 2.2.6 DC GEAR MOTOR: BVM, V.V.NAGAR Page 19 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 FIG.2.14 DC MOTOR 10RPM This DC motor with metal gear head is ideal for low RPM, High Torque application like lifting an object through hook and also useful for various robotics applications. This motor has following electrical and mechanical specification SPECIFICATIONS: MOTOR TYPE: DC With gear box , Metal gear box BASE MOTOR: DC 3000 RPM SHAFT TYPE: CIRCULAR 6 mm Dia with Internal Hole for coupling, 23 mm shaft Length MAXIMUM TORQUE: 6 KG-cm at 12 V RPM: 10 RPM AT 12 V WEIGHT: 150 Gms BVM, V.V.NAGAR Page 20 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 MAX LOAD CURRENT: 450 mA at 12 V-10 RPM FIG.2.15 CROSS SECTIONAL VIEW OF MOTOR BVM, V.V.NAGAR Page 21 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 22 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 3. CIRCUIT DIAGRAM 3.1 Circuit Diagram FIG.3.1 Circuit diagram of Project Description: In this figure 3.1 circuit diagram of project explain here. In this, Arduino controller is connected to ESP8266 Wi-Fi through serial communication pins i.e. RX and TX pin. Arduino also connected with three different dc motors to perform operation. Using Andriod application we can send data to Wi-Fi ESP8266 and ESP send the data to Arduino. Based on received data, Arduino performs LEFT, RIGHT, FORWARD, REVERSE, UP and DOWN operation of Crane. Here we are design Internet of thing – IOT based andriod application, in future we can also control industrial crane remotely. BVM, V.V.NAGAR Page 23 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 24 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 4. SOFTWARE INFORMATION: 4.1 PROTEUS SOFTWARE: What is proteus? Basically PROTEUS is also simulating software but it helps you attach many components with the 8051. Like resistors, capacitors, LEDs, LCDs, keypads, ICs etc. and these are just few that I have named in general. It has a complete library and you will find everything that you will ever need. You can design your complete circuit and then simulate it to view the final output. This means that after perfecting your project on the programming side in KEIL, you will need to simulate it on PROTEUS to determine the output of the hardware components. The simulators I mentioned in my previous post were strictly for beginners. They just show you the output of the microcontroller so you can learn how everything works. They will accompany you as long as you are dealing with manipulating the data on the ports or registers. Sooner or later, you will be going further and attaching external hardware to the 8051 but that's exactly how we deal with it. So if you're talking about simulating a complete circuit then you actually need PROTEUS for this. FIG.4.1. PROTEUS SOFTWARE SCREEN BVM, V.V.NAGAR Page 25 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Proteus Design: PROTEUS is designed to be user-friendly and you will get the hold of it instantly. There is no need to worry about some complex configuration / settings prior to simulation. The basic steps Place your components from the library Connect them accordingly Load HEX file (if 8051 is involved) Simulate the circuit Placing components: Click the "Pick from library (P)" button as shown in the figure Select any category Select item from the list FIG.4.2. COMPONENT SELECTION BVM, V.V.NAGAR Page 26 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 After selecting component, click anywhere in the design area to select it and then click again to place it FIG.4.3. COMPONENT PLACEMENT Connecting Components: Place all the required components Connect the desired nodes by clicking at starting and ending points FIG.4.4. CONNECTION OF TOOLS BVM, V.V.NAGAR Page 27 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Load code: Double click the 8051 component to open its properties Browse for the HEX file as shown and select it FIG.4.5. GENRATION OF HEX FILE And don't worry, in PROTEUS, there is no need to provide the RESET circuit or crystal oscillator to the microcontroller. It will work just fine even without it. The frequency can be adjusted in the properties window as well. The controls at the left-bottom corner will help you simulate the circuit in real time BVM, V.V.NAGAR Page 28 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 FIG.4.6. RUN CIRCUIT The above picture is the complete circuitry for testing an LED on P2.0 like toggling (ON / OFF) through programming but we will get to that part later on. At this point, you will just see the LED glow if you have programmed it to be always ON. Again I am emphasizing that there is no need for other connections to the microcontroller. BVM, V.V.NAGAR Page 29 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 4.2 ARDUINO SOFTWARE : FIG.4.7. ARDUINO SOFTWARE SCREEN Arduino is an open-source platform used for building electronics projects. Arduino consists of both a physical programmable circuit board (often referred to as a microcontroller) and a piece of software, or IDE (Integrated Development Environment) that runs on your computer, used to write and upload computer code to the physical board. The Arduino platform has become quite popular with people just starting out with electronics, and for good reason. Unlike most previous programmable circuit boards, the BVM, V.V.NAGAR Page 30 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Arduino does not need a separate piece of hardware (called a programmer) in order to load new code onto the board – you can simply use a USB cable. Additionally, the Arduino IDE uses a simplified version of C++, making it easier to learn to program. Finally, Arduino provides a standard form factor that breaks out the functions of the micro-controller into a more accessible package. The Arduino software is where you will do most of your programming for the Arduino board. The software is compatible with Windows, Mac OSX and Linux. The software is open-source, and you can download the latest version from the Arduino Software page. Programs for the Arduino are known as sketches. The image to the left shows an example of a simple sketch that blinks an LED. It turns it on, waits a second, turns it off, waits a second and loops until the Arduino is turned off. It really is that simple to get going. The syntax, or the words and structure of the code, is similar to Java and C/C++. If you have any experience in programming, you will find the Arduino very easy to use, and if you haven’t, it is easy to pick up and there are a lot of tutorials and helpful people out there. When the code is completed, you will want to upload it to the board. Before the code can be uploaded, it needs to be compiled. Compiling basically takes your code, and converts it to code that is readable by the Arduino. BVM, V.V.NAGAR Page 31 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 32 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 5. RESULT ANALYSIS 5.1 SOFTWARE WORK: FIG.5.1 Interfacing of Arduino with motor in proteus FIG.5.2Run Simulation BVM, V.V.NAGAR Page 33 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 34 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 6. ADVANTAGS & APPLICATIONS 6.1 Advantages Increase productivity Less physical effort Saving time Security enhancement No need to move up and down the truck bed or client to alivated and dangerous places Comfort Reducing injuries Improve working condition 6.2 Applications In mega factories FIG 6.1 Mega Factories BVM, V.V.NAGAR Page 35 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Road construction FIG 6.2 Road constructions Dockyard FIG 6.3 Dockyards BVM, V.V.NAGAR Page 36 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 Building construction FIG 6.4 Building Constructions BVM, V.V.NAGAR Page 37 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi BVM, V.V.NAGAR Year: 2015-16 Page 38 INDUSTRIAL CRANE CONTROLLED BY Wi-Fi Year: 2015-16 CONCLUSION "The Future of technology is computers and power electronics" The expected outcome would be that the crane would be controlled by remotely using internet of things – IOT by Wi-Fi application. The crane will work according to andriod application signal like START, STOP, RIGHT, LEFT, REVERSE AND FORWARD. The objective is to provide a smooth and stable and safe motion, effective grasp and proportional motion tracking of the crane and fast tracking response. The industrial crane control by human hand was developed to demonstrate the possibility of intuitive, simple, glove-based input general enough to be extended to other applications, including hardware and software. The crane control by Wi-Fi has the potential to start bridging the large gap between human ideas and machine responses. Internet of Things technology is gaining popularity in almost every area that utilizes smart machines. In aircraft traffic controls, this technology can aid in detailing every part of location information about the airplanes near to the airport. In cranes, this can be used instead of remote so that easy picking and shedding of load can be done at different locations. Smart Televisions are nowadays coming with this technology making the user carefree about the remote and allowing him to use hands for changing the channels or volume BVM, V.V.NAGAR Page 39