Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
O. Röhrlea
Simulating the Electro-Mechanical Behavior of
Skeletal Muscles
Stuttgart, November 2009
Institute of Applied Mechanics (Civil Engineering), University of Stuttgart,
Pfaffenwaldring 7, 70569 Stuttgart/ Germany
{roehrle}@simtech.uni-stuttgart.de
www.mechbau.uni-stuttgart.de/ls2
a
Abstract The ”Physiome Project” by the International Union of Physiological Sciences (IUPS)1 and
the ”Virtual Physiological Human Project” funded through the European Union2 are probably the
two most prominent initiatives that aim to provide a framework for modeling the human body using
computational methods. Models developed in such a framework should, from a physiological point of
view, be accurate enough to be used in hypothesis testing or biological function analysis. This can
only be achieved, if physiological information from different spatial and temporal scales, e.g. the cell,
the tissue, and the organ level are incorporated in one model. The author describes a biophysical
model of excitation-contraction coupling in skeletal muscles. The emphasis hereby is on linking the
electro-physiological behavior on the cellular level to the biomechanical behavior on the organ level.
Keywords Skeletal Muscle · Electro-mechanical Coupling · Computational Physiology
Preprint Series
Stuttgart Research Centre for Simulation Technology (SRC SimTech)
SimTech – Cluster of Excellence
Pfaffenwaldring 7a
70569 Stuttgart
[email protected]
www.simtech.uni-stuttgart.de
Issue No. 2009-21
2
O. Röhrle
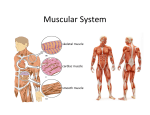
Fig. 1 Structure of a skeletal muscle3
Muscles can be characterized into three major types: smooth, cardiac, and skeletal muscle. Smooth
muscle cells are responsible for the contractibility of organs such as blood vessels, the gastrointestinal
tract, or the respiratory tract; cardiac muscles make up the wall of the heart; and skeletal muscles
are responsible for the motor activity of the musculoskeletal system. All muscles have in common
that a muscle contraction is induced through an external stimulus: contraction of smooth muscle
cells can be, for example, initiated by pacemaker cells, the so-called Interstitial Cells of Cajal (ICC),
myocytes (heart muscle cells) by a stimulus originating from the sinoatrial node on the right atrium
and propagating via the Purkinje fibers to the entire myocardium, and skeletal muscles by action
potentials propagating from the brain via nerve fibers and neuromuscular junctions to the respective
muscle fibers. The process of inducing a change in the state of the muscle’s mechanical characteristics
through an electrical stimulus is referred to excitation-contraction coupling. In the case of skeletal
muscles, the contraction, or the shortening, of a skeletal muscle results in movement since skeletal
muscles are attached in our musculoskeletal system via tendons to the bones.
1 Skeletal Muscle Anatomy and Physiology
The human musculoskeletal system consists of a total of about 640 skeletal muscles. All of them can be
voluntary contracted and hence can be consciously controlled. While the general purpose of all skeletal
muscles is the same, individual muscles are highly adapted to its functional task. For example, the
skeletal muscles of a 100m dash sprinter have to fulfill a different function then those of a marathon
runner. A computational model of a skeletal muscle, which includes principles from the cellular level
as well as the whole muscle level, allows one to investigate and test hypothesis on the mechanical and
electro-physiological properties of healthy and pathological muscles.
1.1 The anatomical structures and functional organization of skeletal muscles
A skeletal muscle is a complex construct of connective tissue and muscle fibers (see Figure 2). Skeletal
muscles consist of cylindrical and elongated cells, the muscle fibers. Each muscle fiber consists of in
series connected sarcomeres, which are the contractile machinery of a skeletal muscle. Further, each
muscle fiber is surrounded by a thin layer of connective tissue called endomysium. Groups of muscle
fibers (sometimes 1000s - depending on size and function of the muscle) are wrapped within a thin layer
of connective tissue called the perimysium to form a muscle bundle, or fascicle. One skeletal muscle
can then be defined as the amalgamation of fascicles joining into a tendon at each end. Further, the
entire muscle is surrounded by a protective sheath called the epimysium. The force stemming from a
contractile response within a single muscle fiber is transmitted from the muscle fiber to bone via a
complex network of connective tissue: the intramuscular connective tissue (endomysium, perimysium,
and epimysium), tendons, inter-muscular connective tissue of adjacent muscles, and structures other
than the muscles (blood vessels, tissue that support nerves). While the network of connective tissue
certainly plays a crucial role for the structural organization of a muscle, the bulk of a skeletal muscle
is made up of muscle fibers. The muscle fibers can be divided into two basic types: slow-twitch fibers
Modeling Skeletal Muscles
3
(type I) and fast-twitch fibers (type II). The fast-twitch muscle fibers can further be subdivided into
type IIa, IIb, and IIx.
1.2 Electrical activity and cellular properties of skeletal muscle
Regardless of its type, all skeletal muscle are innervated by the central nervous system and receive
electrical impulses from alpha-motor neurons, which are controlled by the motor cortex. Each alphamotor neuron hereby innervates several skeletal muscle fibers at the same time. The aggregation of all
the muscle fibers that are innervated by the same alpha-motor neuron defines the smallest functional
unit of a skeletal muscle, the so-called motorunit. From an excitation-contraction coupling point of
view, one of the key biophysical property of a skeletal muscle is that all the fibers within a motorunit
can potentially be spread all over the muscle. Hence, all muscle fibers within a skeletal muscle are
electrically independent from each other but mechanically coupled. The property that all muscle fibers
within a motorunit are activated simultaneously and that fibers associated with a motorunit can be
spread throughout the muscle leads to an activation process that is functionally different from the
one in cardiac or smooth muscle tissue. The force that a muscle can produce can be controlled by the
number of motorunits that are active. A different number of motorunits and independent activation
of motorunits, i.e. activating motorunits with different frequencies, is the basis for controlling the
movement/contraction of muscles.
The physiological process how a neural impulse initiates a contractile response within a skeletal
muscle fiber is very complex. In short, the excitation of a motor axon spreads to a muscle fiber through
+
chemical processes involving Ca2 and acetylcholine (ACh). The diffusion of ACh and receptors in
the muscle fiber membrane results in an alternation of the permeability of the membrane and causes
it to depolarize. At depolarization, an impulse (action potential) is generated that propagates along
the entire length of the muscle fiber. Through the transverse tubular (T-tubular) network, the action
potential is quickly carried to the center of the fiber where the muscle fibrils are located. In case that
the potential difference between the inside and outside of the cell (transmembrane potential) exceeds
a certain threshold value, intracellular reactions cause the interaction between myosin (thick filament)
and actin (thin filament) by forming so-called crossbridges. The repeated binding, ratcheting, and
letting go of the myosin heads causes the thick filament to slide over the thin filament and to shorten
the muscle fiber.
2 A Multi-Scale, Multi-Physics Model of Skeletal Muscle Contraction
The mathematical framework presented herein focuses on modeling the electro-physiology on the cellular level and its link to the mechanical output (force generation) of a skeletal muscle. The previously
outlined skeletal muscle’s properties are hereby used as a guide to couple models across the scales.
The neural activity and the physiology of the neuromuscular junctions are ignored. However, to include the possibility of inducing time-varying activation patterns in single motorunits (rate coding)
or motorunit-specific stimulation frequencies (firing rates), the activity of the neuromuscular junction
has been mimicked by injecting at the location of the neuromuscular junction an intracellular current,
which is large enough to initiate a depolarization of the respective muscle fiber cells. The development
of the overall framework of coupling the electro-physiology of the cellular level to the organ level can
be summarized by the following steps:
1. Modeling the electro-physiological behavior of a skeletal muscle at a single point along a skeletal
muscle fiber (Section 2.1).
2. Describing the physiological behavior of a single skeletal muscle fiber based on different stimulation
frequencies (Section 2.2).
3. Generating a three-dimensional, anatomically-based computational model of a skeletal muscle (Section 2.3).
4. Defining a multi-scale constitutive law to couple the electro-physiological model of the cellular level
with the mechanical behavior of the entire muscle (excitation-contraction coupling, Section 2.4).
5. Applying upscaling techniques for efficiently solving the coupled problem (Section 2.5).
4
O. Röhrle
2.1 Cellular model of skeletal muscle
The systematic study of complex interactions between different molecular components i.e., calcium
channels, sodium channels, myosin, or actin, lead to mathematical models that are typically described
by ordinary differential equations (ODEs). Such phenomenological models that describe the cellular
behavior is subject to the field of systems biology. Since the work of Hodgkin and Huxley on the
squid’s giant axon in 1952,4 many researchers developed mathematical models describing the healthy
and pathological behavior of cells. A large repository of such models can, for example, be found on
http://www.cellml.org.
The electro-physiological model used in this work is an amalgamation of a number of cell models
which individually describe parts of the cell physiology of skeletal muscles. This amalgamated model
is made up of a system of 51 ODEs that describe the changes of intracellular and extracellular ion
concentrations as well as the binding states during crossbridge kinetics. The interaction of these ODEs
defines changes in different physiological properties, for example, the membrane potential, calcium
ion concentrations, and the interactions of contractile proteins. In modeling the membrane potentials,
the sarcolemmal and T-tubular membranes are represented separately using Hodgkin-Huxley-type
formulations, which allow to represent the fatigue effects of potassium accumulation in the T-tubular
space. Such a representation also allows to incorporate differences in the concentration of membrane
channels between fast and slow twitch muscle fibers. A detailed description of the transmembrane
model used within this framework, including a list of the parameters for the different muscle fiber
types, is given in the publication of Shorten et. al.5
This cell model was selected because it represents the cellular properties of skeletal muscle fibers
from action potential activation right through to crossbridge dynamics. The main advantage of this
model is that the entire chain of processes allows for a more physiologically realistic representation
of complex cellular behavior, such as membrane fatigue, metabolic fatigue, force summation, and the
catch-like effect.
2.2 Electro-physiological behavior of a single skeletal muscle fiber
The most common approach for modeling the electrical activity of biological tissue (here, the entire
skeletal muscle fiber), which do not describe the electro-physiology of a single cell (here, a particular
point along a skeletal muscle fiber), is to solve the bidomain equations. The bidomain equations provide
a continuum modeling approach, in which, as its name indicates, the intracellular and extracellular
space are modeled as they would occupy the same space (volume-averaging). The bidomain equations
in three-dimensional are given by
∇ · ((σ i + σ e ) ∇φe ) = −∇ · (σ i ∇Vm ) + Is1 ,
m
∇ · (σ i ∇φe ) + ∇ · (σ i ∇φe ) = Am Cm ∂V
∂t + IIon − Is2 ,
(1)
where σ i is the intracellular conductivity tensor, σ e describes the extracellular conductivity tensor,
Vm = φi −φe represents the difference in voltage between the intra- and extracellular space (transmembrane potential), IIon is the sum of all ionic currents stemming from the respective cellular reaction,
Am prescribes the surface to volume ratio of the cell membrane, Im defines the transmembrane current
density per unit area, and Is1 and Is2 provide the possibility to apply an external stimulation, e.g.
to model the process of depolarization of a skeletal muscle fiber at the neuromuscular junction by
injecting an external current to the intracellular domain.
The first equation is used to calculate the extracellular potential field that results from a given
transmembrane potential distribution. The second equation is a reaction-diffusion equation in terms
of the transmembrane potential. The nonlinear reaction term stems from IIon , which is the sum of
all ionic currents across the membrane of the respective cells. The ionic currents are calculated using
phenomenological models describing the electro-chemical processes of the underlying cells, e.g. crossbridge dynamics, calcium release, or calcium cycling (cf. Section 2.1). Moreover, the solution of the
cellular model does not only provide the input of the ionic currents to the bidomain equations, but also
provides input for the level of activation as cellular parameters such as calcium or attached crossbridge
concentrations can be directly linked to mechanical output. Hence, solving the bidomain equations
requires the solution of the cellular problem at every computational point of the domain of the tissue
Modeling Skeletal Muscles
5
Fig. 2 Left: Finite element model of the Tibialis Anterior, the surrounding bones, and the sciatic nerve with
the tibial and fibular nerve branches. Right: The deep (red) and the superficial (gold) compartments of the
Tibialis Anterior and the skin and fat layer (gray).
and hence provides a spatial description of cellular parameters that, in turn, can be used to describe
the spatially-varying level of activity of the mechanical model.
2.3 Geometric skeletal muscle model
To couple the electro-physiological behavior of single muscle fibers with the biomechanical behavior
of a whole muscle, an anatomically-based model, including its fiber distribution, needs to be created.
For this purpose, the Tibialis Anterior is used. The Tibialis Anterior muscle is located on the lateral
side of the tibia and is thick and fleshy proximally and tendonous distally. It arises from the lateral
condyle and upper region of the lateral surface of the tibia and inserts into the medial, lower surface of
the first cuneiform bone and the base of the first metatarsal bone. The Tibialis Anterior is composed
of a superficial and a deep compartment separated by a tendonous aponeurosis, with the fibers of each
compartment having a different pennation angle.
R
The geometrical model of the Tibialis Anterior is derived from the Visible Human
data set. The
geometrical shape of the muscle is represented by a volumetric tri-quadratic Lagrange finite element
mesh, which was created using a manual digitization and a least-squares fitting technique, similar to
the technique described by Bradley et. al.6 (Figure 2.3). Next, the fibers, which run in most skeletal
muscles from tendon to tendon (or aponeurosis), need to be embedded in the volumetric model of
the muscle. This can be achieved by describing for each embedded fiber the pennation angle, which is
the angle between the tendonous structure and the muscle fiber. Data on the pennation angle can be
obtained, for example, for a generic model from literature or from Diffusion Tensor Magnetic Resonance
Imaging (DT-MRI) in case that a subject-specific model is desired.
The muscle fibers are described as one-dimensional objects, which are discretized using one-dimensional
linear Lagrange finite elements. Based on the pennation angle, the fibers can be aligned in threedimensional space along the actual fiber direction of the muscle. Hence, based on the level of detail,
6
O. Röhrle
e.g., if a one-dimensional string represents a fascicle, a single fiber, a set of fibers, or a motorunit, a
fine distribution of muscle fibers can be included.
2.4 Excitation-contraction coupling
In principle, the bidomain equations have to be solved for each muscle fiber. Depending on the number of muscle fibers modeled within a skeletal muscle, this can lead to a significant computational
cost. However, this computational cost can be significantly reduced as all muscle fibers within a motorunit are excited simultaneously through the same alpha-motor neuron. Therefore, solving for the
electro-physiological behavior of the muscle fibers using the bidomain equations can be reduced to one
representative fiber for each motorunit.
The complexity of the skeletal muscle cell model provides a wealth of data, which can be used for
various investigations. The parameters of interest with respect to modeling the excitation-contraction
+
process are parameters that can be linked to mechanical output, e.g. Ca2 -transients or binding states
of the crossbridges between the actin and myosin. Within this framework, the parameters representing
the concentration of crossbridges in the attached prepowerstroke state (A1 ) and the concentration
in the attached postpowerstroke state (A2 ) are used to link the output of cellular (fiber) model to
the mechanical model of muscle contraction. The difference between the crossbridges in an attached
prepowerstroke and the postpowerstroke is the ability to generate force. In the prepowerstroke, the
crossbridges only form a connection between the actin and myosin but are not yet generating any
tension, while the attached crossbridges in the postpowerstroke state are associated with generating
tension and hence are responsible for the contraction. Macro-mechanically speaking, the number of
attached crossbridges influences the passive stiffness of a muscle during excitation-coupling, while the
attached postpowerstroke crossbridges attribute to force generation.
The mechanical response due to the excitation-contraction coupling is only one of two parts describing the overall mechanical behavior of muscle tissue and is typically referred to as the active part. For
the active part, one assumes that muscle fibers only generate force in the longitudinal direction, which
is described (locally) by a vector a0 , the so-called fiber direction. The description of the remaining part
is referred to as extracellular matrix, or ground substance, of a muscle. Due to the additive nature of
the mechanical behavior, the free energy of the entire muscle tissue, ψ muscle , can be written as
ψ muscle (C, a0 , α, f active (λ)) = ψ matrix (C, a0 ) + ψ active (C, a0 , α, f active (λ)),
(2)
where C is the right Cauchy-Green
deformation tensor, α ∈ [0, 1] is an internal variable that describes
√
the level of activation, λ = a0 · Ca0 is the fiber stretch, and f active is the normalized force-length
relationship describing the overlap of actin and myosin and hence the ability to generate tension
through crossbridge dynamics. The normalized force-length relationship is included, as the solution to
the above-described cellular model does not account for any spatial information, i.e. the stretch of a cell.
The relative overlap between the thin and thick filaments (actin/myosin), however, influences the ability
of crossbridges to attach, and hence to generate tension. The normalized force-length relationship is
a commonly used tool to incorporate the physiological behavior of fiber stretch in purely mechanical
models.7
The constitutive behavior of the overall muscle can be deduced from the material derivative of the
free energy. The 2nd Piola-Kirchhoff stress tensor for the entire muscle is given by
Smuscle = Smatrix + Sactive
∂ψ matrix (C, a0 )
∂ψ active (C, a0 , f active (λ), λ, α)
=2
+2
,
∂C
∂C
where the first summand defines the 2nd Piola-Kirchhoff stress tensor for the extracellular matrix, while
the second one describes the changes due to a contractile response of all muscle fibers. The stress-strain
relationship (stress tensor) for the extracellular matrix can be obtained, for example, by fitting the
respective material parameters to experimental data gathered in multiaxial-stretch or/and indention
tests of non-active muscle tissue. For the active part, one can experimentally determine the maximum
contractile stress of single fibers. Furthermore, as mentioned above, the mechanical change due to a
contractile response can be split into two parts: the first one is due to the generation of tension in
the postpowerstroke state and the second one is related to the change of passive stiffness due to the
Modeling Skeletal Muscles
7
Fig. 3 Normalized force-length relationships describing phenomenologically the ability to generate tension
(active) and the overall passive behavior of the ground matrix (passive). The ”active” force-length relationship
describes the relation between fiber stretch λ and the overlap of the thick and thin filaments and hence the
possibility for crossbridges to attach.
attached crossbridges in the pre- and postpowerstroke. Both mechanisms act in the direction along a
muscle fiber and are typically measured with respect to the deformed (actual) configuration. Hence,
the 2nd Piola-Kirchhoff stress tensor for the active part can be expressed in terms of cellular parameters
(attached crossbridges) as
Sactive = Spass + Sten
h
pass
+A2 σff
active
= A1140
(λ) +
λ2 f
ten
A2 σff
active
(λ)
2 f
Amax
λ
2
i
(a0 ⊗ a0 ),
(3)
where the constant value of 140 in the denominator of the passive component relates to the total
amount of troponin within a cell, Amax
presents the maximal concentration of attachable crossbridges
2
in the postpowerstroke, and σffpass , σfften , and f active (λ) are the maximal contractile stress along the
fiber direction and the normalized force-length relationship for the tension generation components,
respectively. The normalized force-length relationships for the tension generated components (f active )
and the passive behavior of the ground matrix (f passive ) are depicted in Figure 3.
The macro-mechanical model itself is based on solving the governing equations of finite elasticity
theory using the finite element method. Tri-quadratic Lagrange finite element basis functions are used
to represent the geometry of the muscle as well as to discretize the governing equations. Solving for the
mechanical deformation due to skeletal muscle activity or due to a change of the muscle attachment
area (movement of the bone) requires the evaluation of the 2nd Piola-Kirchhoff stress tensor and the
muscular activity.
2.5 Upscaling
The level of activation, α, as introduced in Eqn. (2), has been expressed in Eqn. (3) in terms of
cellular parameters associated with physiological principles of crossbridge dynamics. The large number
of fibers within a skeletal muscle, the differences of time-relevant scales between the cellular and the
organ level, and the stability requirements of the numerical algorithms for solving the bidomain and
8
O. Röhrle
the cellular equations require a large number of grid points. The smallest simulation, which is still
capable of mimicking key physiological properties of structure and function, requires about 1000 fibers
and a fiber grid point distance of 0.0625 mm,8 which leads in the case of the Tibialis Anterior to a
total of about 100,000 grid points. A finite element mesh of the entire muscle containing this amount
of nodes or Gauss points would be excessive and too time-consuming, even on state-of-the-art high
performance computing systems. This is particular true for simulations aiming to include a realistic
fiber density of large muscles, i.e. muscles with 100,000 or more muscle fibers.
It is thus necessary to employ an appropriate upscaling method. In this context, this upscaling
approach is a method that relates cellular variables stemming from a fine-scale model at the grid points
of the bidomain equations to the respective Gauss points of the finite elements used to discretize the
governing equations of finite elasticity on the whole organ scale. To do so, the closest Gauss point of
each grid point, which is embedded in the muscle to represent the electro-physiology of a single muscle
fiber cell, is determined. In the case of the cellular variables A1 and A2 , the value of a fiber grid point
is upscaled to its closest Gauss point by averaging the respective values of A1 and A2 at all the fiber
grid points that have the same Gauss point as their closest neighbor. Upscaling techniques other than
averaging are conceivable as well. For example, the upscaling technique could be based on integration
over a volume, distance-based (e.g., weighted average), Monte-Carlo-like (e.g., to cope with the large
number of fiber grid points), or micro-structurally-based (e.g., to include regional differences of muscle
and tendon-like structures).
3 Simulating Muscle Contraction of the Tibialis Anterior
The input to the presented framework is a train of stimuli – either the same one for all muscle fibers or
a separate one for each motorunit. The expected output of the model is the deformation of the muscle
and the magnitude and direction of the resultant force generated by the selected stimulation train. The
different components and the coupling of the cellular and organ level within the presented excitationcontraction modeling approach is demonstrated in a computational example using the Tibialis Anterior.
The example is equivalent to stimulating the nerve supplying the Tibials Anterior with 8 neural stimuli
at a frequency of 20Hz, fixing the tendons at both ends of the muscle (isometric contraction), and
solving for the resultant muscle deformation and force. Such a scenario mimics an experimental setup
of applying a strong current to the distal part of the nerve supplying the Tibialis Anterior. Figure 4
depicts the results obtained from numerical simulations based on the steps presented in Section 2.
Figure 4A depicts the particular nerve stimulus that serves as input to the skeletal muscle model,
i.e. Is1 in (1). The applied stimuli has an effect on the (sub-)cellular processes, which are modeled
using a slow and fast twitch skeletal muscle fiber cell version of the Shorten et. al. model5 (cf. Section
2.1). The output of the concentration of the attached crossbridges during prepowerstroke (A1 ), as a
reaction to the prescribed sequence of stimuli depicted in Figure 4A, is presented for a slow twitch
single skeletal muscle fiber cell in Figure 4B. As skeletal muscle fibers are electrically isolated but
mechanically coupled, the calculation of the propagation of action potentials throughout the muscle
tissue is confined to single fibers. Due to the one-dimensional nature of the skeletal muscle fiber
anatomy, it is sufficient to use the one-dimensional version of the bidomain equations. The neural
stimuli serves hereby as external source that triggers the action potential propagation. Figure 4C
displays the transmembrane potential along a single muscle fiber at 3 ms, 6 ms, and 9 ms after the first
stimulus has been applied to the mid point of the skeletal muscle fiber (cf. Section 2.2). Note, solving
the bidomain equations also requires a time integration step of the entire cell model. Hence by solving
the distribution of the action potential along a single muscle fiber, one obtains at the same time all
the unknown cellular variables of the cell model, e.g. the crossbridge concentrations in the pre- and
postpowerstroke. Solving the cellular behavior for a representative muscle fiber within each motorunit
provides the flexibility of simulating a physiologically-based recruitment of a skeletal muscle. However,
as previously mentioned, all muscle fibers of this particular example are simultaneously stimulated
and behave alike. The cellular parameters for each fiber within the anatomically-based model of the
Tibialis Anterior, in this framework specifically the concentrations of the pre- and postpowerstroke
attached crossbridges (cf. Figure 4B), serve after a homogenization process (cf. Section 2.5) as input
to the calculation of the level of activation, and hence to the macroscopic constitutive law (cf. Section
2.4). Solving the governing equations of finite elasticity for the current state of activity using the finite
Modeling Skeletal Muscles
9
element method, allows the computation of the deformation and the reaction forces for the contraction.
The results of the deformation and muscle force for one particular point in time is depicted in Figures
4D and 4E respectively.
A detailed description of the geometrical model used within this example, including all its structural
and functional components like pennation angle data, fiber type, motorunit distribution, etc., is given
in the work of Davidson.8
Fig. 4 A: Nerve stimulus that serves as input to an electro-mechanically coupled model of a skeletal muscle.
B: Solution of the cellular parameter A1 (the concentration of pre-powerstroke attached crossbridges) of the
Shorten et. .al. cell model5 based on the stimulation protocol depicted in (A). C: Action potential distribution
along a skeletal muscle fiber 3 ms, 6 ms, and 9 ms after the first stimulus was applied to the mid point of
the skeletal muscle fiber. D, E: Action potential distribution (D) as well as deformation (E) and computed
muscle force (red arrow in E) after all skeletal muscle fibers of the Tibialis Anterior have been stimulated
simultaneously.
4 Applications and Outlook
Validating new models, modeling assumptions, and computational frameworks are extremely important tasks and contain many challenging aspects. During the validation process of new computational
frameworks, models developed within such a framework need to be checked for their mathematical
consistency and against experimentally measured data. Both validation processes can be quite challenging. The complexity of the model, the computational time for the simulations, and the absence of
10
O. Röhrle
an analytical solution poses the biggest challenges for a computational validation. One possibility for
such a validation process is to analyze the error-reduction factors with respect to a sequence of grid
refinements for several different setups. In the absence of an analytical solution, a fine grid solution
is typically taken as the gold standard. Furthermore, if one seeks to validate the modeling framework
against optimal finite element approximation properties, e.g., optimal error reduction rates for a sequence of refined meshes, one has to take into account that in the presence of strong nonlinearities
optimal properties are most likely no longer achievable, not even for simple examples. Computational
validation of the current framework has been attempted by comparing the error-reduction rates (convergence rates) of the proposed electro-mechanical model with mechanical-only model of similar nature.
The results of this comparison have shown good agreement for different finite element basis functions
and numerical test examples.7
Experimental validation of the proposed electro-mechanical model is even more difficult. The biggest
challenges for an experimental validation process stem from collecting suitable data that can be used
to compare simulations with actual experiments. A suitable parameter for the validation process is, for
example, the muscle force exerted at the attachment areas. While computing the muscle force exerted
at the attachment areas using the above described model is straightforward, the experimental setup for
determining the same force in vivo or in vitro is extremely challenging and sometimes even impossible,
e.g. for human muscles. In an attempt to validate the proposed model, an experimental setup has been
designed to determine the muscle force exerted by the Tibialis Anterior of a mouse while simulating
the sciatic nerve distally. This is still work in progress.
Another possibility of collecting experimental data for validation could be electromyographic (EMG)
signals. By using EMG measurements, one can measure the activity of muscles. Based on the described
electro-mechanical framework, one is able to easily compute the electrical activity of the muscle fibers
within the tissue and hence derive from its activity EMG signals in silico. The grand challenge for
the experimental setup is, however, to have a good estimation of the input (activation signals) to the
specific muscles. This could be solved by eliciting specific responses within muscle tissue based on
external stimulation.
Eliciting specific muscle responses due to external stimulation is also referred as ”Functional Electrical Stimulation” or, in short, FES. The proposed framework has great potential to provide new
insights within the field of FES. External stimulation, in particular surface electrical stimulation of
denervated skeletal muscles, is widely used as a method to regain muscle functionality after muscle
activity has been lost through a disease, long bed rests, space flights, or being paraplegics. To advance
the field of FES, it is important to gain further insights on how different muscle fiber distribution and
type and placement of electrodes can have an effect on muscle recruitment and force generation, in
particular with respect to muscle fatigue.
Success in the field of computational biomechanics heavily depends on the success of large-scale
collaborative scales across and within disciplines. For example, from a computational point of view,
the development of new and integrated multi-scale algorithms exploiting emerging technologies and
high-performance computing architectures are necessary. This requires an environment for innovative
ideas as well as cross-discipline collaborations between many different scientists researching in the
broad field of simulation technologies, c.f. the Cluster of Excellence for Simulation Technology at the
University of Stuttgart, Germany (http://www.simtech.uni-stuttgart.de). The same applies for the
development of new experimental methods and methodologies. The success of the ambitious goal of
developing a virtual version of us humans, or even ”just” a virtual model of a single organ, certainly
depends strongly on successful collaborations between many different scientists originating from many
different fields, i.e., mathematicians, computer scientists, material scientists, engineers, computational
physiologists, medical practitioners, biologists, and many more fields.
Acknowledgements The author would like to thank the German Research Foundation (DFG) and the Foundation for Research in Science and Technology for financial support of the project within the Cluster of Excellence in Simulation Technology (EXC 310/1) at the University of Stuttgart and under contract UOAX0406 at
the University of Auckland, New Zealand.
Modeling Skeletal Muscles
11
References
1. Hunter, P.J. and Borg, T.K.: Integration from proteins to organs: the Physiome Project. Nature
Reviews Molecular Cell Biology, 4(3) (2003), 237–243.
2. Clapworthy, G., Viceconti, M., Coveney, P.V., and Kohl, P.: Editorial. Philosophical Transactions
of the Royal Society A: Mathematical, Physical and Engineering Sciences, (366) (2008), 2975–2978.
3. SEER Training Modules, Cancer Registration & Surveillance Modules. U. S. National Institutes
of Health, National Cancer Institute, 13 October 2009, http://training.seer.cancer.gov/
4. Hodgkin, A.L. and Huxley, A.F.: A quantitative description of membrane current and its application to conduction and excitation in nerve. Journal of Physiology, 117(4) (1952), 500-544.
5. Shorten, P.R., OCallaghan, P., Davidson, J.B., and Soboleva, T.K.: A mathematical model of
fatigue in skeletal muscle force contraction. Journal of Muscle Research and Cell Motility, 28(6)
(2007), 293–313.
6. Bradley, C.P., Pullan, A.J., and Hunter, P.J.: Geometric modeling of the human torso using cubic
Hermite elements. Annals of Biomedical Engineering, 25 (1) (1997), 96–111.
7. Röhrle, O. and Pullan, A.J.: Three-dimensional finite element modelling of muscle forces during
mastication. Journal of Biomechanics, 40 (15) (2007), 3363–3372.
8. Davidson, J.B.: Biophysical Modelling of Skeletal Muscle. PhD Thesis, The Unviersity of Auckland,
(2009).
9. Röhrle, O., Davidson, J.B., and Pullan, A.J.: Bridging scales: a three-dimensional electromechanical
finite element model of skeletal muscle. SIAM Journal on Scientific Computing, 30 (6) (2008),
2882–2904.