Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Fault tolerance wikipedia , lookup
Stray voltage wikipedia , lookup
Electronic engineering wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Voltage optimisation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Alternating current wikipedia , lookup
Voltage regulator wikipedia , lookup
Mains electricity wikipedia , lookup
Power electronics wikipedia , lookup
Schmitt trigger wikipedia , lookup
Buck converter wikipedia , lookup
Oscilloscope types wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
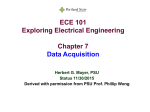
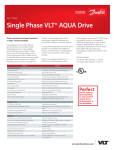
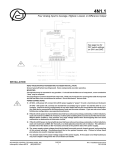
Multi-Disciplinary Engineering Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number: 08311 FPGA BASED MULTI-PUPOSE DRIVER/DATA ACQUISITION SYSTEM Brian Pinkham – EE Murtuza Quaizar –EE Corey VanBlarcom -EE Steven Fastrow –CE Andrew Fitzgerald -CE ABSTRACT The objective of this project is to develop an integrated system solution that has the capability of enabling PC applications to acquire and control real time data through a re-configurable FPGA system. This project will enable future capability that can be defined and driven by PC applications. This systems consists of three major functions, a custom designed circuit board complete with data acquisition, and drivers, reconfigurable FPGA, embedded PowerPC processor running an HTTP server. The PowerPC, processor will allow the versatility of running diverse software applications while at the same time taking advantage of the custom designed, hardware system. AC Power Distribution PC Interface (GUI) Test Vectors Button FPGA Recorded Output Test Vectors Signal Conditioning (input) Signal Conditioning (output) 16 Analog voltage Inputs INTRODUCTION 16 Analog Outputs 12 Digital Inputs This system enables PC applications to drive electronic Data Acquisition and drivers for applications, including ASIC testing and robotic environmental controls. For ASIC testing the system must be fast, complete, trouble-free, and economical. For robotic applications, the device must be robust and accurate to acquire various environmental data, and drive a wide array of onsite applications. Therefore the project P08311, as a revision to the work of P07301 will contribute significantly to the growing field of data collection, by creating systems that are capable of acquiring digital and analog inputs and driving digital and analog inputs. 12 Digital Outputs Figure 1: A Block Diagram of the System The system is designed to be operated over a Web Browser via Ethernet, using Virtex-4FX platform; an embedded PowerPC with FPGA. This will enable future functionality that can be defined though high level application. This system has the versatility to acquire analog voltage inputs and TTL/CMOS digital inputs to be implemented by an FPGA based multi-purposed DAQ system. The final implementation can support a robotic platform, and serve as viable testing environment for testing digital ASICs. Copyright © 2008 by Rochester Institute of Technology Proceedings of the Multi-Disciplinary Engineering Design Conference The objective of the design is to meet the desired specifications and build a working prototype that includes a printed circuit board. The working prototype will include analog input with signal conditioning, digital I/O, analog current output, analog voltage output, and controlling and interfacing software. NOMENCLATURE ADC: Analog to Digital Converter ASIC: Application specific integrated circuit DAC: Digital to Analog Converter DAQ: Digital Acquisition DATA ACQUISITION: The inputs to the System DRIVER: The output of the FPGA based Data Acquisition ELF: Executable Linker File FIFO: First in First Out FPGA: Field Programmable Gate Array FTP : File Transfer Protocol GUI: Graphical User Interface HTTP: Hyper text transfer protocol JAVA: Programming Language Ksp/s: Thousands of Samples per seconds I/O : Input-output PC : Personal Computer PCB: Printed Circuit Board PIC : programmable integrated circuit QNX : Supported Operating System for Xilinx ML403 OS : Operating System RAM: Random Access Memory MUX : Multiplexer TTL/CMOS: Transistor-transistor Logic VXWORKS: Supported Operating System for Xilinx ML403 XilCore: Supported Operating System for Xilinx ML403 Page 2 required to have a run time of 1 hour off an internal rechargeable battery. The above specifications were negotiated and were redefined as the development process progressed. The battery capability was eliminated from the project, as it required a great deal of engineering time and had minimum impact on the final presentation of the system. The Development board that was selected was the Xilinx Board for its sufficient number of I/O pins, its small and concise size, and its technical support from the manufactures. The digital inputs were reduced from 16 digital inputs and 16 outputs to 12 digital inputs and 12 digital outputs to meet the speed specification. The interface to the PC-Host changed from a GUI interface to a system interface over a web browser. This change was motivated by time constraints in implementing a JAVA application communication protocol for PC-Host and development board. NEEDS The goal of the FPGA Driver/Data Acquisition system was to satisfy the needs of two existing customers. Professor George Slack from the department of Electrical Engineering at the Kate Gleason College needs to utilize the DAQ system to record and output analog data in a robotic platform, and Dr. Marcin Lukowiak, from the department of Computer Engineering at the Kate Gleason College, needs to test an ASIC with digital inputs and outputs. It was planned that the system was to be presented in the form of a GUI to be run on a PC host, backed by a supported hardware. The FPGA based platform that Professor Lukowiak had recommended, was a Diligent Development board. SPECIFICATION The hardware was originally designed with 24 analog voltage inputs, 16 digital inputs, 8 Analog Voltage Output, 8 Analog controlled Current Output and 16 digital outputs. The analog signals had to accept voltage levels from 0 to 12 volts, with a sampling rate of 20Ksp/s. The digital signals had to be processed at the fastest possible rate. The system was also Table 1: Specifications for the final deliverables for the DAQ system CONCEPTS Figure 1 shows the system layout including each of the inputs and outputs of the systems at the margins, while at the center was the FPGA. The design was considered to have a hardware that would interface with the environment, and support the activities and functions of the FPGA which would reside as the center of the project. Project P08311 Page 3 Proceedings of the KGCOE Multi-Disciplinary Engineering Design Conference The analog inputs and outputs, and the digital inputs and outputs, and power management was developed by the Electrical Engineers. And the FPGA, embedded processor and the user interface was designed by the Computer Engineers. with a ripple of 0.01dB and a 40dB per decade roll off. The Filter consisted of two 2nd order SallenKey circuits, and voltage attenuating circuit at the output. The recorded implementation of the filter is shown below in Figure 2b. DESIGN OF HARDWARE Analog Inputs The active analog Filter was one of the most important hardware stages in order to ensure signal integrity for the analog inputs. The inception of the input end of the Analog design was tested against three different types of implementations schemes. The first was to multiplex or MUX the input, and then do the filtering and signal condition between the multiplex and the ADC. The second implementation idea was to filter the input and then multiplex the input signals directly to the ADC. Thirdly, the idea to use a micro controller to take the place of the multiplexer, and serially connect the Analog input to the FPGA, while doing the ADC within the PIC. The first idea was eliminated due to propagation delay. The idea behind the micro controller was a plausible alternative to replacing the ADC, DAC, MUX and the COUNTER. However this idea was also dropped due to the steep learning curve associated with the implementation of this method. The third idea, which was similar to the first, required for the filtering of the analog input to occur before the MUX, rather then between the MUX and ADC. It was chosen for its straightforward solution. Decision was made to design for a higher order low pass filter. The motivation for this design was the needed capability of meeting the customer’s specification to sample data at 20Ksp/s. According to the Nyquist theorem, to sample at 20KHZ, no more than a 10KHZ signal was expected to be at the input of the ADC. Any signal of significant amplitude that was passed through with a frequency greater then 10KHZ, would alias and potentially distort all other inputs from that channel. Therefore, a steep 3dB cutoff was designed with an earlier frequency roll off. R49 C38 0.068uF C39 0.056uF U7A 953 953 C40 0.18uF C35 0.068uF IN+ V- 11 C37 12V 0.027uF 7 OUT R57 10 U7B 1K IN+ V+ 5 412 4 OUT R56 12V LM324M 9 IN- V- VV+ R55 4 IN+ 1.1K 1 V+ 3 AnalogInput31.05K LM324M 6 IN- OUT R54 4 R53 -12V 11 -12V 11 -12V LM324M 2 IN- 12V Figure 2b: Voltage input (top), and filtered voltage output (bottom) The output from each of these 16 filters goes into one of two 8 channels multiplexers (ADG408). These multiplexers were used to switch between all 16 input channels and were chosen for their fast switching speeds (250ns) and low ‘Turn On’ resistance (<100 ohms). The multiplexers are addressed by the output of one 4 bit binary counter, which is incremented by the FPGA. This was done to minimize the number of connections that needed to go to the FPGA. Analog to Digital Conversion 2 8ch muxes Anti-Aliasing Filter with unfavorable gain 16 analog voltage inputs (0-12V) 1 2 3 4 5 6 7 8 8 ch Analog Multiplexer (DG408DY) Analog to Digital Converter (ADC121S101) 5V scaled input signal SDATA1 CS (enable) 6 I/O Pins used on the FPGA SCLK 9 10 11 12 13 14 15 16 Analog to Digital Converter (ADC121S101) 8 ch Analog Multiplexer (DG408DY) SDATA2 8 U7C R163 33.2 0 AnalogSelect3 4-bit binary counter (74VHC39) Figure 2a: PSPICE schematic view of the Low pass Chebyshev filter of the 4th order RESETcnt CLKcnt Figure 3: Complete design of the Analog to Digital Conversion A Low pass Chebyshev filter of the 4th order, shown in Figure 2a. Cutoff frequency was designed at approximately 1.4K Hz, Copyright © 2008 by Rochester Institute of Technology Page 4 Proceedings of the Multi-Disciplinary Engineering Design Conference The output from the multiplexers enters the inputs of two analog to digital converters (ADC121S101). The voltage values read at these inputs is then converted into a 12 bit binary representation and transmitted to the FPGA serially at a sample rate of 500KS/s. The other 8 channels were for the Voltage output circuit, shown below in Figure 5a, and took similar voltage level from the FPGA and scaled it to 0 to 12 volts. +2.5V The complete conceptual design of the analog to digital conversion was implemented, and is shown in Figure 3. R97 10K R99 V_OUT1 Analog Outputs 48.7K -12V LM324M 11 2 IN- The output to the data acquisition board had 16 channels. Of those channels, 8 are allocated for analog current output, seen in Figure 4a. Those current outputs ranged from 0-20mA given an input of 0 to 5 V from the FPGA board, shown in Figure 4b VR103 OUT PRE_VOUT1 3 IN+4 U19A V+ 12V V2 12 V5 12 C3 .1uf C4 .1uf 1 1K 0 Figure 5a: PSPICE schematic view of the Output Voltage Source I 350 Rload 0 U2A4 3 V6 Q3 + V V1 = 0 V2 = 5 TD = .001 TR = .5 TF = .5 PW = .7 PER = 2 V+ OUT 1 2 - 11 LM324/NS Q2N4063 V- C2 .1uf Rsense 250 Figure 5b: Voltage input (channel 1), and scaled voltage output (channel 3) V4 -12 0 C5 .1uf Digital Inputs and Output The Digital input for the Data acquisition system was taken from an ASIC and other various DAQ applications. The inputs were meant to be highly modular and fully reconfigurable giving the user full control of what is designated to be an input or output. The 12 digital inputs and 12 digital outputs are interchangeable and reconfigurable. The digital inputs and outputs are directly tied into the FPGA, meeting the specification for having the signals be as fast as the electronic devices were capable. 0 Figure 4a: PSPICE schematic view of the Output Current Source 5.0V 2.5V SEL>> 0V V(V6:+) 20mA Power Management 10mA Power was supplied from an ATX power source. The supply, was rated at 250 W, it supplied all the voltages needed for full functionality of the FPGA Multipurpose system. 0A 0s 0.5s 1.0s 1.5s 2.0s 2.5s 3.0s 3.5s 4.0s 4.5s -I(Rload) Time Figure 4b: Current output (bottom) Vs. Voltage in (top) 5.0s Though the power requirement was reduced significantly from having to design a board with a rechargeable battery to using an ATX power supply, power management was still a key issue. Project P08311 Proceedings of the KGCOE Multi-Disciplinary Engineering Design Conference The option to select a number of different voltage outputs for the digital inputs and digital outputs was made available on the hardware system. The Voltages were selected using a jumper at the output of a specified voltage. These voltages were floating at the end of a voltage regulator, until a jumper closed the loop on the requested voltage. PCB Board Page 5 The FPGA based Development board that was selected had the most features, support, and minimal size. The Diligent Development Board, which was favored by the customer, had similar favorable features, but lacked support. Therefore the team decided to go with another FPGA platform, which would have technical support, since there was little to no prior experience in programming for a Software /Hardware codesign. The Printed Circuit board layout was done using the PCAD tool software. The final revision of the board, was a 12 ½ x8 ½ in with 4 layers, and a one ounce copper. Figure 7: Top view of the Development board Xilinx ML403 Figure 6: PCB implementation of the hardware design The top and bottom layer served as the majority of the routing layer, Layer 2 was created as the power plane for the -12V, +12V, and +5V, and Layer 3 was designed to be the Ground plane. The 4 layer board solution was expensive but necessary for signal integrity and noise consideration. The Bottom right corner of the board has 2 rows of 32 pin headers that were designed to mate with the Development board from the top. Finally the left most connector was an open connection for the ATX power supply. The board was done with experienced hands and was reviewed by an outside firm that generously gave their time to reviewing our board. DESIGN OF FPGA PLATFORM The team chose the Xilinx ML403, for its numerous and winning features. It had an Ethernet port, USB, 64 I/O pins, compact flash, LCD screen, LCD diodes, and buttons and switches which were useful when debugging. Operating System Time and resources was spent in selecting the most appropriate Operating System to support the communication line between the PowerPC processor and the FPGA. Before deciding upon the final operating system, it was evaluated that three different operating systems, QNX, VXWORKS, and XilCore were viable to use. Originally, the QNX operating system was to be used, because it came packaged with the Xilinx-ML403. However this operating system was difficult to use, and difficult to load on the development system and therefore had to be neglected. Software-Hardware Co-Design This project offered a unique challenge to the team, since no one had previously developed code to support both the software end, which included the embedded processor, and the hardware end, which was the FPGA. Development Board Next VXWORKS was tried. In fact, though VXWORKS was proprietary software of Wind River, Tom Wall, a representative from Wind River offered the use of the Operating systems without cost, as members of the RIT community. He also offered much of his valuable time to help support VXWORKS on the Xilinx-ML403. But even with the efforts of Mr. Wall, the OS was unable to run on the development board successfully. After much speculation it was seen that though the Xilinx-ML403 claimed to be supported, the author of that application note never tested it on its platform, and Copyright © 2008 by Rochester Institute of Technology Page 6 Proceedings of the Multi-Disciplinary Engineering Design Conference VXWORKS was abandoned all together. XilCore was finally selected as the OS, which is a Xilinx kernel. User Interface There was also the limited resources of the development system that had to be considered. The Development project was constraint with an original budget of twelve hundred dollars. However, since most of the cost had to be budgeted for the development board and the creation of the PCB, the team had half the amount of the original budget to work with. A web browser was used to interface with the embedded processor using HTTP. This would require the user to load all their driver values (i.e. test vectors) on the compact flash, and control the configurations that they would want through a web page. WFIFO2IP_RdAck = '0' WFIFO2IP_empty=’0' wfifo_read IP2WFIFO_RdReq = '1' wfifo_data=WFIFO2IP_Data The original design of the system was to have a GUI implementation run on a host PC interface to the DAQ system. What it would have done was set up a FTP protocol using a JAVA APP, and allow the user to interface with the embedded processor (having it to run commands and etc), which in turn would have interfaced with the FPGA on the system. WFIFO2IP_empty=’1' idle WFIFO2IP_RdAck = '1' wfifo_push dig_out = wfifo_data(31 downto 20) IP2WFIFO_RdReq = '0' FPGA Implementation A FIFO data scheme to pass data to and from the FPGA, as shown in Figure 8. Specifically, 4 FIFO data buffers were used. The first pair of FIFOs was used for the digital inputs and outputs. The second pair of FIFOs was used for the digital information from the analog section’s inputs and outputs. For the read (input) FIFOs, data is passed in at a user specified clock rate. The information is then read in the embedded processor as fast as possible. This information is then written to the on board compact flash card via SystemAce controller. Information is passed from the output FIFO at the same user specified clock rate to the output pins on the development board. RFIFO2IP_Full = '0' rfifo_get rfifo_data = dig_in & X"00000" RFIFO2IP_Full = '1' idle The DAC and the Counter are both connected to the FPGA, which controls the timing and flow of its operation on the Analog end of the DAQ system rfifo_write RFIFO2IP_WrAck = '1' IP2RFIFO_WrReq = '1' IP2RFIFO_Data <= rfifo_data ANALYSIS & EVALUATION RFIFO2IP_WrAck = '0' HARDWARE IMPLEMENATION Figure 8: The FIFO algorithm implementation for the FPGA The initial analysis and evaluation of the functionality of the hardware was done on computer simulation (the filter system, and the voltage and current outputs). The next step was to bread board, including the multiplexers, DAC, and ADC. The Altera Flex 10K was used to emulate the performance at the FPGA end of the Xilinx ML403 while the development board was being worked on, to test the performance of the system hardware. Since Vivace Semiconductor allowed the use of their lab and equipment, the purchase of surface mount components as small as 0805 for the final implementation was a feasible design improvement. . Special interest was take in insuring solid connections between the supported hardware and the development board, by using SAMTEC parts, which had gold planted pins and connectors. FPGA/OS IMPLEMENATION Implementation on the software end was trying to get the embedded PowerPC processor to establish a communication link to the FPGA, as shown above in Figure 9. Doing so required the need to get through much of the convoluted operations and workings of the development board. Due to a Project P08311 Proceedings of the KGCOE Multi-Disciplinary Engineering Design Conference manufacturers defect, the software that came with the development board, EDKv9.2, didn’t generate code to talk with the peripherals of the system. The older version of the same software, EDKv8.2 was then reverted, which was used to generate the ELF file containing the code for the embedded processor, while still using EDKv9.2 for its efficiency in compiling the bit stream to program the FPGA. PPC GPIO BUS 32-Bits Wide (Bi-Directional) Read FIFO (32-Bits Wide) (512 Entries Deep) (2 MB) Write FIFO (32-Bits Wide) (512 Entries Deep) (2 MB) DAQ Control Unit (State Machines) Expansion Header (32 Pin I/O) Figure 9: Hardware (FPGA), software (PowerPC) implementation Resource management with respect to logic cells, called ‘slices,’ became an issue when the FPGA was being worked to its memory capacity. As the code got more complicated and lengthy, the download cable became unusable because of a lack of available memory in the B-RAM. Therefore instead of downloading the bit stream from the cable, it was compiled into a SYSTEM ACE file, which placed the software on the compact FLASH card that copied the software onto the S-RAM that had more memory, instead of the B-RAM which did not have as much memory available. TESTING DATA ACQUISITION Testing and confirmation of the basic operations of the power system and power management on the board were evaluated by the LED test lights that were placed on the PCB. And all individual stage of the hardware was tested independently, such as the filter system, the operation of the multiplexer, and the operation of the ADC. The output of the system between the DAC to the voltage output, and current output were also tested independently of the entire system. When validity of the subsystems was confirmed, then the entire data acquisitions and drivers was placed in operational mode and tested. This was Page 7 done independent of the Xilinx ML403 board, which was still under development during, using instead the Altera FLEX FPGA. FPGA Due to the nature of the design, Software unlike hardware was being designed, implemented and tested each step of the way. Therefore, the software was not expected to be finished till the end of the project cycle. The testing on the Development board made aware of some of the design issues that would have otherwise been missed. When the ability to read and record data on the FPGA was implemented, it was observed that the Digital input was never at a value that was expected from it. For example, when the digital inputs was not connected to anything, it was expected that the recoded data would be all zeros. However what was observed was a random set of ones and zeros, in no particular order. The issue was resolved when pull down resistors were introduced to each of the digital inputs. This solution provided a definite state to each of the digital inputs, as oppose to leaving them floating and holding an unknown value. RESULTS HARDWARE All aspects of the design was tested, and proved that the system was a success. The system delivered the customers with an operational data acquisition and drivers. The data acquisition offers a rugged signal processing for the analog inputs, which can be seen in Figure2b. The drivers on the system provide for a proportional voltage and current outputs. Through this testing period, issues were raised and the designs was re-evaluated but the ultimate goal of the project was still being met: to test digital data – (very important) and have some operating range over the analog input and analog output. After overcoming fundamental operational issues, testing of the performance of the system revealed that the filtering and the attenuation had to be modified on the Schematic Level. Due to missing capacitors on the feedback of the second stage of the filter, there was a unstable amount of noise that was resonating through the ground and power traces. This issue was resolved by eliminating the additional stage and appending those changes for a revised schematic. During testing, the current outputs showed a non linear relationship between the input voltages and the output current. Further hardware testing and simulation indicted that the problems varied. There were issues with the switched polarity on the operational amplifier. And the polarity of the BJT had to be switched to conform to manufactures specifications. Similarly a non linear relationship was being observed on the voltage output of the system. Through bread boarding it was made apparent that what was expected on the simulation for the Copyright © 2008 by Rochester Institute of Technology Proceedings of the Multi-Disciplinary Engineering Design Conference voltage driver was not what we were actually observing. In order to provide for an input range of 0 to 5 volts from the FPGA, a 2.5 offset voltage was provided instead of ground. This provided the input with a swing of 0 to 5V peak to peak, where 0 would have corresponded with -12V, and 5 volts would have corresponded to +12V. Instead what was observed was an offset of about 3.3V’s and clipping on the top rail. The issue was resolved by switching through resistance values from the feedback, till clipping at the output was minimized. SOFTWARE In testing, the Memory Flash card was used extensity to build and verify code written on the development board. However due to the Memory Flash Card’s use; the, the connector that was mounted under the development board inevitably broke. The connector was fixed, and the fix provided for it a stable connection, and a convenient accessibility to the slot. Page 8 system, so more were added for each and every different power rail, instead of just the +/-12V and the +5V rail. Also issues with creating a GUI implementation to run on a host PC interface to our DAQ system would have been resolved. The code for the GUI implantation has been written, and can be used as a future design and improvement on our own system. All of the above changes and suggestions have been noted for future work on the system. The Schematics have been updated to include the changes that would have made on a revised PCB board and all other records and progress is viewable on SVN. It is recommended that future work on the FPGA based Data/Acquisition system use a different platform besides the Xilinx ML403 for its FPGA implementation. It is suggested that the TI DaVinci be used as a possible alternative. CONCLUSION Testing was completed, and proved that majority of the project specifications were met. On the input side, the anti-aliasing provided an exact 3dB cutoff at 1.4KHz. However since the attention stage was removed during the testing phase, the customer now has a dynamic range of up to 0 to 5 volts, instead of the original 0 to 12V. The counter and the Multiplexer functioned to provide a fast and accurate switching between the 16 analog inputs to provide for the desired sampling time. The current output was shown to be linearly responsive to a 0 to 5V input from the FPGA. Similarly the voltage output was also proportional to the 0 to 5V input from the FPGA. And dynamic rage was redesigned to be 15V peak to peak, instead of 24V peak to peak. ACKNOWLEDGEMENTS Special Thanks and acknowledgments goes to all of the individuals that helped in the creation of the DAQ system. In particular we would like to extend our thanks to Tom Wall from WindRiver, for his time and commitment to the team. Thanks to Mark Indovina and all the employees at Vivace Semiconductor for letting us present our ideas, critically evaluating those ideas, and for letting us use their lab as late as we needed. The team would like to similarly thank Carl Kosmeral for his review of our initial design. Thanks also goes out to the employees of Cadex Design for looking over our PCB board, before it went into production. And finally, thanks to the RIT faculty for assisting in our design, namely Professor Hopkins, Professor Philips, and of course our Customers, Professor Slacks, and Professor Lukowiak. REFERENCE Griffin, Richard, “VxWorks on the ML403 Embedded Development Platform, 2007 Wind River RECOMMENDED FUTURE WORK Given an extra quarter to work on the project, the limitations that were imposed on the customers’ original specifications would have been resolved Some of these changes include, adding an additional inverting op-amp to the input stage, and correcting the second stage filter which would provide for the dynamic range of 0 to 12V. For the output end, the reference voltage was changed from 2.5V to 3.3V, which will give the customer the full dynamic range of 24V peak to peak. Wind River “Wind River General Purpose Platform,VxWorks Edition”2007 Wind River Systems, Inc Wind River, “Wind River VxWorks Platforms” 2007 Wind River Systems, Inc Xilinx, “Embedded Audio Demultiplexer Reference Design for Xilinx FPGAs” , 2008 Additional trouble shooting components that would have helped in debugging the PCB board have been appended to a revised schematic. These would have included more testing pads, around the analog inputs, DAC, ADC and around the digital inputs and digital outputs. Also when debugging the board, it was realized that LED lights were helpful on the Project P08311