Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
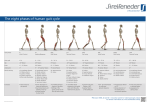
Forward Simulation of Stance and Swing OpenSim Workshop Exercise: Forward Simulation of Swing Pelvis markers Pelvis tilt, tx, ty Hip flexion Gluteus maximus Leg Model: 6 Degrees of Freedom 9 Muscles Psoas major Rectus femoris Biceps femoris • Long head • Short head Gastrocnemius Soleus Thigh markers Vastus intermedius Knee flexion Shank markers Tibialis anterior Ankle flexion Foot markers OpenSim Workshop Part One: Use the Excitation Editor to Replicate the Swing Phase Pelvis markers Pelvis tilt, tx, ty Hip flexion • What Gluteus maximus muscles should you Biceps femoris activate and • Long head • Short head when? • Use the Excitation Editor and Forward Tool Gastrocnemius Soleus Psoas major Rectus femoris Thigh markers Vastus intermedius Knee flexion Shank markers Tibialis anterior Ankle flexion Foot markers OpenSim Workshop Questions: Excitation Editor and Forward Dynamics • What muscles did you activate to generate a swing motion? • How close could you get to the observed motion? • What are some other ways you could solve for muscle excitations to generate a swing motion? OpenSim Workshop Part Two: Static Optimization Pelvis markers Pelvis tilt, tx, ty Hip flexion • Use the Static Gluteus maximus Optimization Tool to solve for Biceps femoris muscle • Long head excitations • Short head • Use the forward tool to generate a simulation with the SO muscle excitations Gastrocnemius Soleus Psoas major Rectus femoris Thigh markers Vastus intermedius Knee flexion Shank markers Tibialis anterior Ankle flexion Foot markers OpenSim Workshop Questions: Static Optimization • How do the static optimization activations compare to the activations you generated yourself? • How do the kinematics from the forward simulation with SO compare to the inverse kinematics solution? OpenSim Workshop Part Two: Computed Muscle Control Pelvis markers Pelvis tilt, tx, ty Hip flexion • Use the Computed Muscle Control to solve for muscle excitations • Use the forward tool to generate a simulation with the CMC muscle excitations Gluteus maximus Psoas major Rectus femoris Biceps femoris • Long head • Short head Gastrocnemius Soleus Thigh markers Vastus intermedius Knee flexion Shank markers Tibialis anterior Ankle flexion Foot markers OpenSim Workshop Questions: Computed Muscle Control • How do the CMC activations compare to the activations you generated yourself and the static optimization activations? • How do the kinematics from the forward simulation with CMC compare to the inverse kinematics solution and the kinematics from the forward simulation with SO? OpenSim Workshop Exercise: Forward Simulation of Stance Pelvis markers Pelvis tilt, tx, ty Hip flexion Gluteus maximus Leg Model: 6 Degrees of Freedom 9 Muscles Psoas major Rectus femoris Biceps femoris • Long head • Short head Gastrocnemius Soleus Thigh markers Vastus intermedius Knee flexion Shank markers Tibialis anterior Ankle flexion Foot markers OpenSim Workshop Part 1: Dynamically Consistent Model & Data Pelvis tilt, tx, ty Hip flexion Leg Dynamics 3 Residual pelvis forces 3 Joint motors GRF on foot Knee flexion Launch OpenSim Handout for detailed instructions Ankle flexion OpenSim Workshop Questions: Preliminaries and Inverse Dynamics 1. What type of data is available? 2. What time range were GRFs measured for the leg of interest? 3. Why are the residual forces so large? 4. Why is the vertical force the largest? OpenSim Workshop Questions: Residual Reduction 1. Why does the model initially “float” up and down? 2. What process did you use to reduce residuals forces while maintaining good tracking? 3. What coordinates were most difficult to track? 4. How small is small enough for residual forces and tracking errors? OpenSim Workshop Part II: Muscle-driven Forward Simulation Pelvis tilt, tx, ty Hip flexion Gluteus maximus Leg Dynamics 3 Residual forces 3 Joint motors 9 Muscles GRF on the foot Psoas major Rectus femoris Biceps femoris • Long head • Short head Gastrocnemius Vastus intermedius Knee flexion Soleus Tibialis anterior Ankle flexion OpenSim Workshop Questions: Computed Muscle Control 1. What is the difference between the actuator constraints file used in CMC and the file for RRA? 2. Plot the muscle activations, found in the states file. Are the observed activations close to what you expect? 3. How can you assess the quality of your simulation? 4. Are the residuals below 2% of body-weight? 5. Are the motor moments at the hip, knee and ankle significant? OpenSim Workshop