Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
STAPL-RTS:
An Application Driven Runtime
System
Ioannis Papadopoulos, Nathan Thomas, Adam Fidel,
Nancy M. Amato, Lawrence Rauchwerger
{ipapadop, nthomas, fidel, amato, rwerger}@cse.tamu.edu
http://parasol.tamu.edu
Motivation
• Parallel programming is hard!
• We want:
• Easy to write, maintainable programs (by non-experts)
• Scalability
• Portability
• Difficult to satisfy all these requirements!
• Modern platforms don’t make it any easier
• Networked multi-socket nodes with multicore processors
• Accelerators, co-processors
• Mixing different programming models (e.g., MPI+OpenMP) is confusing,
error-prone
2
A solution:
Distributed task dependence graphs
• Use dataflow representation of an application
• Describe what your application does, not how to do it
• Easy to write by non-experts
• Create distributed task dependence graph
• Scalable
• No data races
• Runtime system deals with task mapping, execution,
communication
• Abstracts platform, offers uniform communication layer
• New issues:
• Loss of contextual information
• Data copied over and over
• Memory hierarchy ignored
• How to take advantage of shared memory?
3
Our contribution
• Address some of the issues of distributed dataflow
• High level, application-to-runtime transfer of information
• Maintain appropriate abstraction (platform, algorithm, etc.)
• Preserve semantics
• Transfer information from the algorithm through the internal
representation (task dependence graph) into the runtime system
• Leverage high-level information for performance
• Copy elision between tasks in shared memory
• Up to 7% faster in a data mining application
• Increase communication aggregation
• Up to 70% faster on a graph algorithm (128K cores)
4
Related Work
Shared/distributed memory integration
Hybrid MPI+OpenMP
Ad-hoc solution
Habanero C+MPI [Chatterjee et al.,
IPDPS‘13]
Two different models
HPX [Heller et al., ScalA‘13]
Distinction between shared/distributed
(“localities”)
Charm++ [Kale et al., OOPSLA‘93]
User managed thread-safety
Chapel [Callahan et al., HIPS‘04]
Complex algorithms require locality knowledge
Exploit object immutability
Pechtchanski et al., ISCOPE’05
Lower level optimizations
Javari [Birka et al., OOPSLA‘04]
IGJ [Zibin et al., ESEC-FSE’07]
Protection against mutation, but no optimizations
applied
Gordon et al., OOPSLA’12
Prove immutability for thread-safety guarantees,
but no optimizations
Kanor [Jiao et al., HiPC’11]
Compiler gives MPI or OpenMP, but not both
STAPL: Standard Template Adaptive Parallel Library
A library of parallel components that adopts the generic programming
philosophy of the C++ Standard Template Library (STL).
STL
•
•
Iterators provide abstracted access to
data stored in Containers
Algorithms are sequences of
instructions that transform the data
STAPL
•
•
•
Views provide abstracted access to
distributed data stored in Containers
Algorithms specified by Skeletons,
represented at run-time as
PARAGRAPHs, parallel task graphs
that transform the input data
Task dependence graphs are mapped
to the machine by STAPL
6
The STAPL stack
• Users invoke algorithms on
containers via views
• Algorithms are specified through
skeletons
• Skeletons instantiate a task
dependence graph
• Populate the PARAGRAPH
• The Runtime System (STAPL-RTS)
• Maps runnable tasks to the machine
• Abstracts communication
7
Execution Model
• SPMD model with task parallelism support
• Implicit parallelism (e.g., MPI)
• Task and Data Parallelism
• Nested parallelism
• Each nested parallel section executes on a number of
locations
• A location is an isolated address space with associated
execution capabilities (e.g. thread)
• Users create distributed objects (p_objects) on
locations
• Locations communicate with each other only through
Remote Method Invocations (RMIs) on p_objects
8
Remote Method Invocation (RMI)
• Asynchronous communication through RMIs
• Ability to move work, data or both
• Scalable
• Unified communication API over distributed and shared
memory
• Single model
• Easy to program
• Copy semantics of RMI arguments
• Allow for asynchrony
• Eliminate data races, side-effects
• Implicit RMI ordering guarantees
• Consistency model
9
Unifying shared/distributed memory
Hybrid OpenMP+MPI
Mixed-mode
Two different programming models
Unified model over distributed and shared
memory based on RMIs
Typically different algorithms / implementations
for user algorithms
One algorithm and one implementation for
user algorithms
Integration and performance optimization
implemented by the user
Integration implemented through the runtime,
which also offers adaptive performance
Unification through ARMI primitives
10
RMI Usage
struct A : public p_object {
int m_value;
void set(int t) { m_value = t; }
int get() const { return m_value; }
};
foo(…) {
A a;
auto h = a.get_rmi_handle(); // communication handle
int t = 5;
async_rmi(h, 1, &A::set, t); // call with copy of t
t = 6;
future<int> f = opaque_rmi(h, 1, &A::get);
int y = f.get();
assert(y==5); // value is guaranteed to be 5
}
11
Application Driven Optimizations
• High level, application-to-runtime transfer of information
• Take advantage of the task dependence graph
• Use high-level annotations
• Maintain appropriate abstraction
1. Copy elision in shared memory (zero-copy)
• Reduce data copying
2. RMI Tunnels (communication channels)
• Relax consistency guarantees
• Increase communication throughput
12
1. Copy elision in shared memory
• Avoid copies in shared memory with appropriate high-level
information
• Skeletons: drive the task dependence graph (PARAGRAPH) creation
• PARAGRAPH: annotates flow of data
• STAPL-RTS: uses annotations at run-time to avoid copying data
13
PARAGRAPH rules for annotation
Task dependence graph has contextual information.
• Zero-copy
• If a producer task has a single consumer
task of its value and it is on a different
location, move value into STAPL-RTS.
L0
L1
T1
T2
move value
move value
STAPL-RTS
• Immutable sharing
• If a task has multiple consumers, and
at least one is on a different location,
then immutably share value between
consumers.
L0
T1
L1
T2
move value
T3
get reference
STAPL-RTS
immutable shared
14
STAPL-RTS copy elision support
• Move: Transfer objects between locations using move
semantics (C++11)
async_rmi(dest, obj, &A::foo, std::move(x));
• Immutable Sharing: Share object via read-only wrapper with
reference counting
auto x_ref = immutable_shared(x);
async_rmi(dest, obj, &A::foo, x_ref);
auto y = x_ref;
• Avoid temporary copies of return values
auto r = opaque_rmi(dest, obj, &A::get);
auto x = r.get();
15
Experimental Setup
• Cray XK7m-200
• 24 compute nodes
• 12 single-socket nodes with GPUs and 32GB memory
• 12 dual-socket nodes with 64GB memory
• AMD Opteron 6272, Interlagos 16-core CPU @ 2.1GHz
• IBM BGQ (LLNL)
• 24,576 nodes
• Single socket nodes with 16GB of memory
• IBM PowerPC A2, 16-core CPU @ 1.6GHz
16
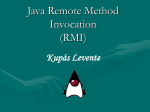
Microbenchmarks
• OSU Put/Get Microbenchmarks on 1 node, 1 MPI process, 2
threads/process
17
K-means algorithm
• Clustering algorithm used in data mining
• Cluster points iteratively until left with K clusters
• Data heavy: result of each step is
a tuple of vectors
http://en.wikipedia.org/wiki/K-means_clustering
• Reduce operation
• Find centroids and number of elements of each cluster
• Broadcast operation
• Distribute reduction result to all locations
• We can reduce data copies
• Leverage shared memory!
• Move semantics during reductions (avoid temporary vector copies)
• Use immutable shared to broadcast the reduction results (avoid early
18
and unnecessary vector copies)
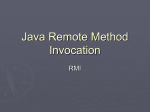
Copy elision in K-means clustering
• K-means clustering algorithm, main computation kernel
Up to 7% gain, no change to user code.
19
2. RMI Tunnels
• Given basic RMI function:
async_rmi(location, obj, pmf, params…);
• What if the algorithm knows something about the pattern
of communication?
• E.g., homogeneous vertex updates in graphs
• Use partially evaluated RMI function.
f = bind(async_rmi, dest, obj, &A::recv, _1);
f(10); // call A::recv(10)
f(5); // call A::recv(5)
• We call this an RMI tunnel
• Communication channel with one or more fixed parameters (e.g.,
destination, target object etc.)
20
Applying RMI Tunneling
• Example: visiting vertices on stapl::graph
• Basic
for (auto v : my_vertices) {
for (auto n : neighbors_of(v))
async_rmi(location_of(n), &graph::visit, wf);
// other traffic (e.g. container metadata, PARAGRAPH)
}
• Using tunnel
auto t =
bind(async_rmi, &graph::visit);
for (auto v : my_vertices) {
for (auto n : neighbors_of(v))
t(location_of(n), wf);
// other traffic does not get injected in the tunnel
}
21
Connected Components algorithm
• Connected components algorithm: find subgraphs wherein
there exists a path between any two vertices
• Each vertex can visit its neighbors in parallel
• Algorithm tolerates relaxed consistency
• We can use RMI tunneling at the algorithm level
• Create dedicated communication channel for vertex updates
• Reduces run-time checks
• Decreases message payload size via eliminating redundant
information
22
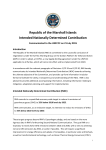
Tunneling with Connected Components
• Connected Components algorithm on Newman-Watss-Strogatz graph
From 1.5x at 32 cores to 1.7x at 128K cores (log-log scale). Improved scalability. 23
Conclusion
• How to get good performance from high-level parallel
programming models
• Transfer contextual information from application to runtime system
• Not necessary to break the abstractions
• We optimized at the lower levels
• Took advantage of shared memory
• Elided copies
• Reduced communication cost
• Just the tip of the iceberg!
24