Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
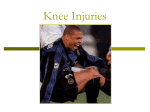
In Vivo, 3D Determination of the Patellar Ligament Moment Arm +1Leszko, F; 1Komistek, RD; 1Mahfouz, MR +1University of Tennessee, Knoxville, TN INTRODUCTION: The patellofemoral joint plays an integral role in the mechanics of the knee joint. The patella acts as a pulley in the knee joint and provides the mechanical advantage by increasing the moment arm of the extensor mechanism. As a result, the quadriceps muscles can induce a moment that produce knee motion without imposing excessive interactive forces at the patellofemoral joint interface. Therefore determination of the patellar ligament contact position and motion are the key element for analysis of the knee mechanics. However, a number of different methods for determination of the patellar ligament moment arm have been reported in the literature, often providing significantly different results. Moreover, most of the currently available data encompass only planar calculation of the patellar ligament moment arm, while it has been found that the knee kinematics involves a complex, three-dimensional analysis. Also, most of the measurements have been done under in vitro or quasi-dynamic conditions. Therefore, the current study focused on determining the in vivo, three-dimensional influence of the patellar ligament moment arm under weight-bearing conditions using four frequently reported methods. METHODS: In vivo, weight bearing knee kinematics were determined for ten healthy subjects. The participants performed a deep knee bend activity while under fluoroscopic surveillance. The patient specific CAD models of the tibia, fibula, femur and patella bones were created based on CT scan images. Next, the CAD models were used to recreate the tibiofemoral and patellofemoral kinematics from the fluoroscopic images using previously published 3D-to-2D registration technique [1]. Once the kinematics of each bone was found, the line of action of the patellar ligament was calculated as the line joining the tibial tuberosity and the patella apex (distal end). Finally the patellar ligament moment arm was found using four different methods, most frequently used in the literature. Namely, the arm length was calculated as the perpendicular distance from the patellar ligament with respect to: - 1, a) medial and b) lateral tibiofemoral contact points, - 2, helical (screw) axis of the femur, - 3, a) medial and b) lateral femoral flexion facet centers, - 4 center of the transepicondylar axis. The kinematics were described using the Grood and Suntay convention and the results were matched for the actual knee flexion. The tibiofemoral contact point was determined from the distance map (Fig. 2). RESULTS: The patellar ligament moment arm was calculated with respect to the helical axis, femoral flexion facet centers and the transepicondylar axis, revealing a similar pattern (Fig. 4). The arm length using these three methods was decreasing with the increasing knee flexion. The moment arm calculated using the tibiofemoral contact point, revealed different patterns. The moment arm increased in the early flexion of the knee, but above 30 degrees of flexion it slightly decreased. Fig. 3. The patellar ligament moment arm calculated for the same subject using 4 different methods. Fig. 1. 3D-to-2D registration technique allowed the recreation of the 3D knee kinematics. Fig. 4. Average patellar ligament moment arm. DISCUSSION: All three methods resulted in similar values of the moment arm for flexion above 30 degrees. However, in early flexion, the moment arm calculated with respect to the tibiofemoral contact points was significantly different then the other methods. Subjects experiencing a larger moment arm, performed similar motion using less force through quadriceps muscles, leading to a decreased patellofemoral bearing surface force. Further investigation is ongoing to conclusively determine which of the four methods produces the most patient beneficial results. Fig. 2. After determining the tibiofemoral kinematics, the distance map between these two bones has been used to determine the contact point location. References: [1] Mahfouz, M.R., et al.: Medical Imaging, IEEE Transactions on, 2003 [2] Grood ES, Suntay WJ.: J. Biomedical Engineering, 1982 Poster No. 2047 • 56th Annual Meeting of the Orthopaedic Research Society