Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power inverter wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Loudspeaker enclosure wikipedia , lookup
Current source wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Surge protector wikipedia , lookup
Stray voltage wikipedia , lookup
Integrating ADC wikipedia , lookup
Alternating current wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Regenerative circuit wikipedia , lookup
Two-port network wikipedia , lookup
Power electronics wikipedia , lookup
Mains electricity wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Voltage optimisation wikipedia , lookup
Voltage regulator wikipedia , lookup
Schmitt trigger wikipedia , lookup
Buck converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
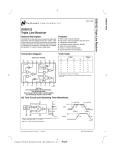
RY485D DATASHEET Polarity adaptive RS-485/RS-422 Transceivers RY485D General Description The RY485D is Reverse Connect Transceivers, high-speed transceiver for RS-485 communication that contain one driver and one receiver. The device feature fail-safe circuitry, which guarantees a logic-high receiver output when the receiver inputs are open or shorted. This means that the receiver output will be logic high even if all transmitters on a terminated bus are disabled. The RY485 feature reduced slew-rate driver that minimize EMI and reduce reflections caused by improperly terminated cables, allowing error-free data transmission up to 500kbps. All transmitter outputs and receiver inputs are protected to +/15kV using the Human Body Air Gap Model. The transceiver typically draws 500 micron amper of supply current when unloaded, or when fully loaded with the driver disabled. All devices have a 1/8-unit-load receiver input impedance that allows up to 256 transceivers on the bus. The RY485 is intended for half-duplex communications. Applications RS-485D Communications Level Translators Transceivers for EMI-Sensitive Applications Industrial Control Local Area Networks Energy Meter Networks Power Inverters Building Automation Networks Telecommunications Equipment PIN Configuration Figure 1. 1 | 睿奕科技 www.keane.cn RY485D DATASHEET Figure 2. Product Application Schematic Drawing(A&B on the main wire can be interchangeable) ABSOLUTE MAXIMUM RATINGS Supply Voltage (VCC) ..........................................................+ 7V Control Input Voltage (RE, DE)...................-0.3V to (VCC + 0.3V Driver Input Voltage (DI).............................-0.3V to (VCC + 0.3V) Driver Output Voltage (A1, A2)...........................……-13V to +13V Receiver Input Voltage (A1, A2) ...............................-13V to +13V Receiver Output Voltage (RO)....................-0.3V to (VCC + 0.3V) Operating Temperature Ranges...........................-40°C to +85°C Continuous Power Dissipation ........................................…..TBD 2 | 睿奕科技 www.keane.cn RY485D DATASHEET (VCC = +5V ±5%, TA = TMIN to TMAX, unless otherwise noted. Typical values are at VCC = +5V and TA = +25°C.) PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS 5 V DRIVER Differential Driver Output (no load) VOD1 Figure 5 Differential Driver Output VOD2 Figure 5, R = 27Ω (RS-485) ΔVOD Figure 5, R = 27Ω 0.2 V VOC Figure 5, R = 27Ω 3 V ΔVOC Figure 5, R = 27Ω 0.2 V VIH1 DE, DI, RE Input Low Voltage VIL1 DE, DI, RE DI Input Hysteresis VHYS Input Current (A and B) IIN1 Change in Magnitude of Differential Output Voltage (Note 2) Driver Common-Mode Output Voltage Change In Magnitude of Common-Mode Voltage (Note 2) Input High Voltage Driver Short-Circuit Output Current (Note 4) 1.5 2 V 0.8 100 DE = GND, VCC = GND or 5.25V V mV VIN = 12V 125 VIN = -7V -75 µA -7V ≤ VOUT ≤ VCC VOD1 V -250 0V ≤ VOUT ≤ 12V 0V ≤ VOUT ≤ VCC 250 mA -50 mV ±25 RECEIVER Receiver Differential Threshold Voltage VTH Receiver Input Hysteresis ΔVTH Receiver Output High Voltage VOH IO = -4mA, VID = -50mV Receiver Output Low Voltage VOL IO = 4mA, VID = -200mV 0.4 V Three-State Output Current at Receiver IOZR 0.4V ≤ VO ≤ 2.4V ±1 µA RIN -7V ≤ VCM ≤ 12V 96 IOSR 0V ≤ VRO ≤ VCC ±7 Receiver Input Resistance Receiver Output Short-Circuit Current -7V ≤ VCM ≤ 12V -200 -125 25 mV VCC -1.5 V kΩ ±95 mA SUPPLY CURRENT No load, RE = DI = GND or VCC Supply Current Supply Current in Shutdown Mode 3 | 睿奕科技 ISHDN DE = VCC 475 1000 DE = GND 420 800 DE = GND, VRE = VCC 40 60 µA µA www.keane.cn RY485D DATASHEET (VCC = +5V ±5%, TA = TMIN to TMAX, unless otherwise noted. Typical values are at VCC = +5V and TA = +25°C.) PARAMETER SYMBOL CONDITIONS MIN TYP MAX tDPLH Figures 7 and 9, RDIFF = 54Ω, CL1 = CL2 = 100pF 10 30 60 10 30 60 -3 ±100 ns 53 75 ns Driver Input to Output tDPHL UNITS ns Driver Output Skew | tDPLH - tDPHL | tDSKEW Figures 7 and 9, RDIFF = 54Ω, CL1 = CL2 = 100pF Driver Rise or Fall Time tDR, tDF Figures 7 and 9, RDIFF = 54Ω, CL1 = CL2 = 100pF Driver Enable to Output High tDZH Figures 8 and 10, CL = 100pF, S2 closed 70 ns Driver Enable to Output Low tDZL Figures 8 and 10, CL = 100pF, S1 closed 70 ns Driver Disable Time from Low tDLZ Figures 8 and 10, CL = 15pF, S1 closed 70 ns Driver Disable Time from High tDHZ Figures 8 and 10, CL = 15pF, S2 closed 70 ns Receiver Input to Output tRPLH, tRPHL 20 Figures 11 and 13; | VID | ≥ 2.0V; rise and fall time of VID ≤ 15ns 50 80 ns | tRPLH - tRPHL | Differential Receiver Skew tRSKD Figures 11 and 13; | VID | ≥ 2.0V; rise and fall time of VID ≤ 15ns 3 ±30 ns Receiver Enable to Output Low tRZL Figures 6 and 12, CL = 100pF, S1 closed 20 50 ns Receiver Enable to Output High tRZH Figures 6 and 12, CL = 100pF, S2 closed 20 50 ns Receiver Disable Time from Low tRLZ Figures 6 and 12, CL = 100pF, S1 closed 20 50 ns Receiver Disable Time from High tRHZ Figures 6 and 12, CL = 100pF, S2 closed 20 50 ns Time to Shutdown tSHDN (Note 5) 20 60 ns 50 Driver Enable from tDZH(SHDN) Shutdown to Output High Figures 8 and 10, CL = 15pF, S2 closed 50 ns Driver Enable from tDZL(SHDN) Shutdown to Output Low Figures 8 and 10, CL = 15pF, S1 closed 50 ns Receiver Enable from tRZH(SHDN) Shutdown to Output High Figures 6 and 12, CL = 100pF, S2 closed 50 ns Receiver Enable from tRZL(SHDN) Shutdown to Output Low Figures 6 and 12, CL = 100pF, S1 closed 50 ns 4 | 睿奕科技 www.keane.cn RY485D DATASHEET Test Circuit Figure 3. Driver DC Test Load Figure 4. Receiver Enable/Disable Timing Test Load Figure 5. Driver/Receiver Timing Test Figure 6. Driver Timing Test 5 | 睿奕科技 www.keane.cn RY485D DATASHEET Figure 7. Receiver Propagation Delays Test Circuit Figure 8. Driver Propagation Delays Figure 9. Receiver Propagation Delays 6 | 睿奕科技 www.keane.cn RY485D DATASHEET Figure 10. Driver Enable and Disable Times Figure 11. Receiver Enable and Disable Times Figure 12. Typical Half-Duplex RS-485 Network 7 | 睿奕科技 www.keane.cn RY485D DATASHEET .Pin Description. PIN NAME 1 RO FUNCTION Receiver Output. When RE is low and if A - B ≥ -50mV, RO will be high; if A - B ≤ -200mV, RO will be low. RE Receiver Output Enable. Drive RE low to enable RO; RO is high impedance when RE is high. Drive RE high and DE low to enter low-power shutdown mode. RE is a hot-swap input (see the Hot-Swap Capability section for more details). 3 DE Driver Output Enable. Drive DE high to enable driver outputs. These outputs are high impedance when DE is low. Drive RE high and DE low to enter low-power shutdown mode. DE is a hot-swap input (see the Hot-Swap Capability section for more details). 4 DI Driver Input. With DE high, a low on DI forces non-inverting output low and inverting output high. Similarly, a high on DI forces non-inverting output high and inverting output low. 5 GND 6 A1 Bus interface, depending on bus state to decide this Pin to be A or B. A1 and A2 will set to be A or B respectively. When powered up A1 is default to set to A point. 7 A2 Bus interface, depending on bus state to decide this Pin to be A or B. A1 and A2 will set to be A or B respectively. When powered up A1 is default to set to B point. 8 Vcc Positive Supply, VCC = +5V ±5%. Bypass VCC to GND with a 0.1μF capacitor. 2 Ground .Function Table. (Depending on A1 or A2 are judged to A and another Pin is judged to B) TRAMSMITTING RE X X 0 1 INPUTS DE 1 1 0 0 OUTPUTS DI 1 0 X X A2/A1 0 1 High-Z A1/A2 1 0 High-Z Shutdown RECEIVING RE 0 0 0 1 1 8 | 睿奕科技 INPUTS DE X X X 1 0 A1-A2(A2-A1) -0.05V -0.2V Open/shorted X X OUTPUTS RO 1 0 1 High-Z Shutdown www.keane.cn RY485D DATASHEET .Polarity adaptive. RY485D has the polarity adaptive function, which will automatically match A1 and/or A2 to bus A and/or B to keep the chip polarity is identical with the bus. If A1/A2 connects with bus A, the A1/A2 will be set to the A pin of the chip and also if A1/A2 connects with bus B, the A1/A2 will be set to the B pin of the chip. In the field application A1 and A2 can connect to bus A and B randomly, without considering the chip polarity. The principle of Polarity adaptive is as fallows. First we set DE to law voltage to shut the driver. The chip powers up. The bus A is set to high voltage and the bus B is set to low voltage. This state keeps one second. RY485D’s bus interface (A1 or A2) connected to bus A will be set to A pin, and the Pin connecting to bus B will be set to B pin. After the polarity judging, the RY485D can start to operation. The high voltage of bus A and the low voltage of bus B can realize at least in two ways. One is to use a special driver circuit to drive bus A to high and bus B to low. Another method is to use pull up resistor to pull bus A to high voltage and also to use pull down resistor to pull bus B to low voltage. We choose the second method as the better way. RY485D’s maximum data rate is 500KHz, and the minimum data rate is 20Hz. Figure 13. a) A1/A2 connects to bus A/B b) A1/A2 connects to bus B/A If RY485D connects to bus as Figure 13 a), setting DE, RE to low voltage. After powering up, A1 is default to be A pin and A2 is default to be B pin of RY485D. RO is high, after the RY485D internal polarity judgment, RO still keeps high and to confirm A1 should be the A pin and A2 should be the B pin of RY485D. The polarity of A1 and A2 are identical with the buses. If RY485D connects to bus as Figure 13 b), setting DE, RE to low voltage. After powering up, A1 is default to be A pin and A2 is default to be B pin of RY485D. RO is high, after the RY485D internal polarity judgment circuit judges A1 should be the B pin and A2 should be the A pin of RY485D. RO turns to high voltage after the judgment process and the polarities of A1 and A2 are identical with the buses. 9 | 睿奕科技 www.keane.cn