Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
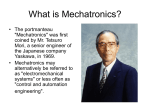
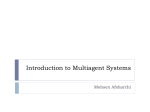
Slovak University of Technology Faculty of Material Science and Technology in Trnava MECHATRONICS Lecture 02 CLASSIFICATION AND FUNDAMENTAL THEORIES APPLIED IN MECHATRONIC SYSTEMS Mechatronic systems are classified as: conventional mechatronic systems, microelectromechanical-micromechatronic systems (MEMS), nanoelectromechanical-nanomechatronic systems (NEMS). The operational principles and basic foundations of conventional mechatronic systems and MEMS are the same, while NEMS can be studied using different concepts and theories. In particular, the designer applies the classical mechanics and electromagnetics to study conventional mechatronic systems and MEMS. Quantum theory and nanoelectromechanics areapplied for NEMS, Mechatronics is the integrated design, analysis, optimization, and virtual prototyping of intelligent and high-performance electromechanical systems, system intelligence, learning, adaptation, decision making, and control through the use of advanced hardware (actuators, sensors, microprocessors, DSPs, power electronics, and ICs) and leading-edge software. Integrated multidisciplinary features approach quickly, as documented in Fig. The mechatronic paradigm, which integrates electrical, mechanical, and computer engineering, takes place. DESIGN FLOW IN SYNTHESIS OF MECHATRONIC SYSTEMS The most challenging problems in mechatronic systems design are: system architecture synthesis, system integration, optimization, selection of hardware (actuators, sensors, power electronics, ICs, microcontrollers, and DSPs) selection of software (environments, tools, computation algorithms to perform control, sensing, execution, emulation, information flow, data acquisition, simulation, visualization, virtual prototyping, and evaluation). DESIGN FLOW IN SYNTHESIS OF MECHATRONIC SYSTEMS Attempts to design state-of-the-art high-performance mechatronic systems and to guarantee the integrated design can be pursued through analysis of complex patterns and paradigms of evolutionary developed biological systems. Recent trends in engineering have increased the emphasis on integrated analysis, design, and control of advanced electromechanical systems. The scope of mechatronic systems has continued to expand, and, in addition to actuators, sensors, power electronics, ICs, antennas, microprocessors, DSPs, as well as input/output devices, many other subsystems must be integrated. The design process is evolutionary in nature. It starts with a given set of requirements and specifications. High-level functional design is performed first in order to produce detailed design at the subsystem and component level. Using the advanced subsystems and components, the initial design is performed, and the closed-loop electromechanical system performance is tested against the requirements. If requirements and specifications are not met, the designer revises or refines the system architecture, and other solutions are sought. At each level of the design hierarchy, the system performance in the behavioral domain is used to evaluate and refine the design process and solution devised. Each level of the design hierarchy corresponds to a particular abstraction level and has the specified set of activities and design tools that support the design at this level. For example, different criteria are used to design actuators and ICs due to different behavior, physical properties, operational principles, and performancecriteria imposed for these components. It should be emphasized that the level ofhierarchy must be defined, e.g., there is no need to study the behavior of millions of transistors on each IC chip because mechatronic systems integrate hundreds of ICs, and the end-to-end behavior of ICs is usually evaluated . (ICs are assumed to be optimized, and these ICs are used as readyto-use compon) Automated synthesis can be attained to implement this design flow. The design of mechatronic systems is a process that starts from the specification of requirements and progressively proceeds to perform a functional design and optimization that is gradually refined through a sequence of envelope, affordability, and other requirements. Both top-down an bottomup approaches should steps. Specifications typically include the perform equirements derived from systems functionality, operating be combined to design highperformance mechatronic systems augmenting hierarchy, integrity, regularity, modularity, compliance, and completeness in the synthesis process. Even though the basic foundations have been developed, some urgent areas have been downgraded, less emphasized, and researched. The mechatronic systems synthesis reported guarantees an eventual consensus between behavioral and structural domains, as well as ensures descriptive and integrative features in the design. These were achieved applying the mechatronic paradigm which allows one to extend and augment the results of classical mechanics, electromagnetics, electric machinery, power electronics, microelectronics, informatics, control theories, as well as to apply advanced integrated hardware and software. To acquire and expand the engineering core, there is the need to augment interdisciplinary areas aswell as to link and place the multidisciplinary perspectives integrating actuators–sensors–power electronics–ICs–DSPs to attain actuation, sensing, control, decision making, intelligence, signal processing,and data acquisition. New developments are needed. The theory and engineering practice of high performance electromechanical systems should be considered as the unified cornerstone of the engineering curriculum through mechatronics. The unified analysis of actuators and sensors (e.g., electromechanical motion devices), power electronics and ICs, microprocessors and DSPs, and advanced hardware and software, have barely been introduced into the engineering curriculum. Mechatronics, as the breakthrough concept in the design and analysis of conventional-, mini-, micro- and nano-scale electromechanical systems, was introduced to attack, integrate, and solve a great variety of emerging problems. BASE STRUCTURE OF THE MECHATRONIC SYSTEM A basic structure of the mechatronic system is created by system, sensors, actuators, devices for information processing. The surrounding environment, in which the mechatronic system operates, is also important. A diagram of this structure is shown in following figure. The system has usually a mechanical, electromechanical or hydraulic structure or it is a combination of these structures. It means that a given physical system can be generally understood as a respective system that can be represented by a hierarchically structured mechatronic system. The present goal is a spatial integration with other functional elements in the area of sensors as well as in the area of actuators. It would create an “intelligent” unit, i.e. an intelligent sensor (integration of a measured values sensor, an analog/digital converter and a microprocessor) and an intelligent actuator (an integration of a digital/analog converter, an adapter circuit or a power amplifier, or even a microprocessor). The intelligent sensor measures analog physical quantities, for example pressure, temperature, velocity, it digit measured values and transfers the signal - suitably adjusted - to information processing devices. The intelligent actuator is directly activated by the digital signal coming from the corresponding information processing device. Signals are converted to analog variables, amplified and then handed over, e.g. to create force or movement. A closer look at relations between the system, the sensors, the information processing and the actuators shows that a description of the relations using flows is useful. In principle, there are three different types of flows: material flow, energy flow, information flow. Material flow: Examples of material flow between mechatronic system units are solid bodies, tested objects, processed objects, gases or liquids. Energy flow: Energy is in this context understood as a different form of energy, for example mechanical, thermal or electrical energy but also action variables (e.g. force or current). Information flow: It means the information transferred between the units of the mechatronic system, for example measured variables, pulse control or data.