Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Model of all known spatial maps in primary
visual cortex
Tobias Fischer
NI VER
S
E
R
G
O F
H
Y
TH
IT
E
U
D I
U
N B
Master of Science
Artificial Intelligence
School of Informatics
University of Edinburgh
2014
Abstract
The primary visual cortex of mammalians is the most extensively studied area in the
visual system. The first studies discovered that there is a retinotopic mapping from the
retina to the primary visual cortex. Retinotopic mapping is where neighboring neurons
in the cortex respond to neighboring locations on the retina. In further research various
other cortical maps such as orientation maps and color maps were discovered. All the
cortical maps are overlaid onto the same set of neurons, and there is evidence that they
interact with each other.
There are a variety of models aiming to replicate the properties of neurons in the
primary visual cortex. The majority of these focus on a small subset of all known spatial cortical maps. For this thesis, an all maps model based on the Gain Control, Adaptation, Laterally (GCAL) model has been developed. There, it has been suggested that
the underlying principles of firing rate neurons, arranged in two dimensional sheets,
using Hebbian learning to adapt to either artificial input patterns or natural images,
can account for a variety of different maps, as well as their combination. This required substantial work on the software package in use, Topographica, which led to a
superior system to define models. It is likely this will be used by almost all users of
Topographica in the future.
This thesis is a small step towards the goal of gaining an understanding of why V1
is wired as it is in mammals, and eventually how the whole visual system works. The
improvements in Topographica which have been made in this project have resulted in
the production of maintainable, modular models, which will hopefully lead to more exciting research in the area of computational neuroscience of vision. The model which
has been built will help in gaining insights to the interplay of the various cortical maps
in the primary visual cortex.
iii
Acknowledgements
I am very grateful to my supervisor, Jim Bednar, who has always encouraged my work,
and has provided valuable advice. He answered all my questions promptly, and his
knowledge and ideas brought this project much further than I could have done by
myself.
I also thank the other members of the Computational Systems Neuroscience Group,
especially Jean-Luc Stevens and Philipp Rudiger. It was an excellent working atmosphere, and their suggestions and assistance improved the quality of my code considerably.
A special thanks goes to John K. Tsotsos, my former supervisor, for sharing his
passion about visual systems; he is an inspiring example for a scientist. Our conversations and his talks have influenced my research interests substantially. Also thank
you to his research associate, Eugene Simine, as he did not hesitate to allow me to remotely access one of their machines, which greatly helped in the building of resource
demanding models.
I would also like to express my gratitude to Jill Dyne, my girlfriend, for her continued support. She always listened to all the issues I encountered, and showed interest
in the work I have done.
I am indebted to my parents, who have been supportive all my life, always showed
their love, and believed in me, and whatever I have done.
Finally, I would like to thank the German National Academic Foundation for their
financial support. Without them, it would not have been possible for me to study at
this wonderful university. Over the last years, they have provided me the opportunity
to meet many interesting people, who have broadened my horizon.
iv
Declaration
I declare that this thesis was composed by myself, that the work contained herein is
my own except where explicitly stated otherwise in the text, and that this work has not
been submitted for any other degree or professional qualification except as specified.
(Tobias Fischer)
v
Table of Contents
1
Introduction
1
2
Biological background
3
2.1
Visual system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.2
Cortical maps found in animals . . . . . . . . . . . . . . . . . . . . .
5
2.2.1
Measurement methods . . . . . . . . . . . . . . . . . . . . .
6
2.2.2
Retinotopic mapping . . . . . . . . . . . . . . . . . . . . . .
7
2.2.3
Orientation map . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2.4
Ocular dominance map . . . . . . . . . . . . . . . . . . . . .
9
2.2.5
Disparity map . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.2.6
Direction map . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2.7
Spatial frequency map . . . . . . . . . . . . . . . . . . . . .
12
2.2.8
Hue map . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.3
Map interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.4
Map development . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
3
Model background
17
3.1
Sparse coding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
3.2
Elastic net models . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
3.3
Models based on self-organizing maps . . . . . . . . . . . . . . . . .
20
3.3.1
Self-Organizing Map . . . . . . . . . . . . . . . . . . . . . .
20
3.3.2
Gain Control, Adaptation, Laterally connected model . . . . .
22
3.3.3
Multiple maps using GCAL . . . . . . . . . . . . . . . . . .
24
Open questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.4
4
Architecture
31
4.1
Pattern generation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
4.1.1
32
Feature coordinators . . . . . . . . . . . . . . . . . . . . . .
vii
4.1.2
4.2
4.3
4.4
4.5
5
6
Pattern coordinator . . . . . . . . . . . . . . . . . . . . . . .
34
Submodels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
4.2.1
Previous implementation . . . . . . . . . . . . . . . . . . . .
36
4.2.2
Using a hierarchy of submodels . . . . . . . . . . . . . . . .
37
4.2.3
Automatically wiring up sheets . . . . . . . . . . . . . . . .
38
4.2.4
Deferred model instantiation . . . . . . . . . . . . . . . . . .
39
4.2.5
Summary submodels . . . . . . . . . . . . . . . . . . . . . .
40
Motion model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.3.1
Previous proposals . . . . . . . . . . . . . . . . . . . . . . .
41
4.3.2
New approach: Multiple projections from LGN sheets to V1 .
42
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.4.1
Feature coordinators . . . . . . . . . . . . . . . . . . . . . .
43
4.4.2
Pattern coordinator . . . . . . . . . . . . . . . . . . . . . . .
44
4.4.3
Submodels . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
Architectural summary . . . . . . . . . . . . . . . . . . . . . . . . .
45
Methods
47
5.1
Orientation preference . . . . . . . . . . . . . . . . . . . . . . . . .
47
5.2
Ocular preference . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
5.3
Disparity preference . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
5.4
Ocular and disparity preference . . . . . . . . . . . . . . . . . . . . .
52
5.5
Direction preference . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.6
Spatial frequency preference . . . . . . . . . . . . . . . . . . . . . .
54
5.7
Color preference . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
5.8
Color and ocular preference . . . . . . . . . . . . . . . . . . . . . . .
56
5.9
Combined model . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
5.10 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
Results
63
6.1
Orientation preference . . . . . . . . . . . . . . . . . . . . . . . . .
64
6.2
Ocular preference . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
6.3
Disparity preference . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
6.4
Ocular and disparity preference . . . . . . . . . . . . . . . . . . . . .
68
6.5
Direction preference . . . . . . . . . . . . . . . . . . . . . . . . . .
70
6.6
Color preference . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
6.7
Color and ocular preference . . . . . . . . . . . . . . . . . . . . . . .
74
viii
7
6.8
Spatial frequency preference . . . . . . . . . . . . . . . . . . . . . .
75
6.9
Combined model . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
Discussion and Future Work
79
7.1
Discussion of the results . . . . . . . . . . . . . . . . . . . . . . . .
79
7.1.1
Orientation preference . . . . . . . . . . . . . . . . . . . . .
79
7.1.2
Ocular dominance preference . . . . . . . . . . . . . . . . .
80
7.1.3
Disparity preference . . . . . . . . . . . . . . . . . . . . . .
80
7.1.4
Ocular and disparity preference . . . . . . . . . . . . . . . .
80
7.1.5
Direction preference . . . . . . . . . . . . . . . . . . . . . .
80
7.1.6
Color preference . . . . . . . . . . . . . . . . . . . . . . . .
81
7.1.7
Color and ocular dominance preference . . . . . . . . . . . .
81
7.1.8
Spatial frequency preference . . . . . . . . . . . . . . . . . .
81
7.1.9
Combined model . . . . . . . . . . . . . . . . . . . . . . . .
81
7.1.10 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
Future work scientifically . . . . . . . . . . . . . . . . . . . . . . . .
83
7.2.1
Interdependence of maps . . . . . . . . . . . . . . . . . . . .
83
7.2.2
Uniform coverage . . . . . . . . . . . . . . . . . . . . . . .
83
7.2.3
Relative order of map development . . . . . . . . . . . . . .
83
7.2.4
Gaussian stimuli for color and spatial frequency . . . . . . . .
84
7.2.5
Lateral connections between spatial frequency channels . . .
84
Future work for Topographica . . . . . . . . . . . . . . . . . . . . .
84
7.3.1
Improved visualization . . . . . . . . . . . . . . . . . . . . .
85
7.3.2
Stereo camera input streams . . . . . . . . . . . . . . . . . .
85
7.3.3
Component based submodels . . . . . . . . . . . . . . . . . .
85
7.2
7.3
8
Conclusions
87
Bibliography
89
ix
List of Figures
2.1
Mapping from the visual field to the LGN and V1 . . . . . . . . . . .
7
2.2
Orientation map in V1 of a macaque monkey . . . . . . . . . . . . .
8
2.3
Orientation preference map overlaid by ocular dominance stripes . . .
9
2.4
Micro-architecture disparity map in cat visual cortex . . . . . . . . .
10
2.5
Direction map in V1 of a ferret . . . . . . . . . . . . . . . . . . . . .
11
2.6
Spatial frequency map in V1 of a macaque monkey . . . . . . . . . .
12
2.7
Hue map in area V1 of a macaque monkey . . . . . . . . . . . . . . .
13
3.1
Comparison of a sparse variable and a Gaussian variable. . . . . . . .
18
3.2
Basic GCAL model with resulting orientation map . . . . . . . . . .
24
3.3
LISSOM color model and resulting maps . . . . . . . . . . . . . . .
25
3.4
Orientation map and spatial frequency map in a LISSOM model . . .
26
4.1
Previous proposals to model motion selectivity . . . . . . . . . . . .
42
5.1
Architecture of a GCAL model with neurons selective for orientation .
48
5.2
Oriented Gaussian input pattern . . . . . . . . . . . . . . . . . . . .
49
5.3
Architecture of a GCAL model with neurons selective for orientation
and ocular dominance . . . . . . . . . . . . . . . . . . . . . . . . . .
50
5.4
Oriented Gaussian input patterns with brightness differences . . . . .
50
5.5
Oriented Gaussian input pattern with position offset . . . . . . . . . .
51
5.6
Oriented Gaussian input pattern with position offset and brightness difference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
5.7
Oriented Gaussian input pattern moving over time . . . . . . . . . . .
53
5.8
Architecture of a GCAL model with neurons selective for orientation
and spatial frequency . . . . . . . . . . . . . . . . . . . . . . . . . .
5.9
54
Architecture of a GCAL model with neurons selective for orientation
and color . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
xi
56
5.10 Example natural image input pattern . . . . . . . . . . . . . . . . . .
57
5.11 Visualization of receptive fields in color simulations . . . . . . . . . .
57
5.12 Architecture of a GCAL model with neurons selective for orientation,
ocular dominance and color . . . . . . . . . . . . . . . . . . . . . . .
58
5.13 Example of natural image patterns in the case of a two-retina simulation 59
5.14 Architecture of a unified GCAL model with neurons selective for orientation, ocular dominance, disparity, direction, spatial frequency and
color . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
5.15 Example natural image patterns for the combined model . . . . . . .
62
6.1
Orientation map for the basic GCAL model . . . . . . . . . . . . . .
64
6.2
Orientation map with overlaid ocular dominance boundaries . . . . .
65
6.3
Ocular dominance preference and selectivity . . . . . . . . . . . . . .
66
6.4
Ocular preference map of a LISSOM model for comparison . . . . . .
66
6.5
Orientation map with overlaid ocular dominance boundaries for a disparity simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6
Disparity preference and selectivity + ocular selectivity for a disparity
simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7
68
Orientation map with overlaid ocular dominance boundaries for a brightness difference+disparity simulation . . . . . . . . . . . . . . . . . .
6.8
67
69
Disparity preference and selectivity + ocular selectivity for a disparity
simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
Orientation map for the motion simulation . . . . . . . . . . . . . . .
70
6.10 Example connection fields of an direction selective neuron . . . . . .
71
6.11 Direction preference map . . . . . . . . . . . . . . . . . . . . . . . .
71
6.12 Orientation map with overlaid direction arrows . . . . . . . . . . . .
72
6.13 Orientation map for the color simulation . . . . . . . . . . . . . . . .
73
6.9
6.14 Overlaid preference+selectivity maps for orientation and color in a
color simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
6.15 Orientation and color maps with overlaid ocular dominance boundaries
for a color+ocular dominance simulation . . . . . . . . . . . . . . . .
75
6.16 Orientation map for the spatial frequency simulation . . . . . . . . .
76
6.17 Spatial frequency map . . . . . . . . . . . . . . . . . . . . . . . . .
77
xii
Chapter 1
Introduction
The human visual system works remarkably well, processing an enormous amount
of complex information in real time. Visual processing areas make up approximately
half of the brain, and yet we do not have a good understanding of how we carry out
everyday tasks, such as face recognition, object detection and obstacle avoidance.
The primary visual cortex (also: striate cortex, V1, area 17) is the first cortical
area that processes visual input. Compared to higher visual areas, it is widely studied,
and many experiments have been carried out focusing on this area. There, matching
qualitatively across species, cortical maps were found. For example, nearby neurons in
V1 respond to nearby areas on the retina (Connolly and Van Essen, 1984), and nearby
neurons in V1 also prefer similar orientations of the input stimuli (Blasdel, 1992b).
These maps were found for a variety of pattern features, i.e. preferences for position,
orientation, direction, spatial frequency and color, as well as the eye the pattern was
presented on, and the difference of pattern locations in the two eyes. Each map has
distinct features, and they are all overlaid on the same set of neurons.
Many computational models which aim to replicate these maps, in order to improve our understanding of the visual system, have been created. In this thesis, the
Gain Control, Adaptation, Laterally (GCAL) model Stevens et al. (2013) is extended
to cover all known spatial feature maps. The original model produces biologically realistic position preference and orientation maps, using a set of two-dimensional sheets of
firing-rate neurons representing different areas of the visual pathway. By adding more
feature specific sheets, and presenting more complex input patterns, the same basic
principles can account for a variety of cortical maps. The initially unspecific neurons
in V1 become selective for input features using normalized Hebbian learning.
In chapter 2 an introduction to the visual system is given. This is of importance
1
2
Chapter 1. Introduction
as the models discussed in later chapters are based on these findings. Furthermore,
all known spatial maps in the visual cortex are presented and their properties are discussed. As one of the aims of this thesis is to build a model of all known spatial maps, it
is important to be able to compare the maps resulting in the model with maps found experimentally in animals (Bednar, 2012). There is clear evidence that the cortical maps
are not independent of each other, i.e. they are related to each other (Blasdel, 1992a;
Müller et al., 2000; Yu et al., 2005; Landisman and Ts’o, 2002). Support for this hypothesis as well as various suggestions of how these maps emerge are also shown.
In chapter 3 various models of the primary visual cortex are introduced. They are
classified into three main groups, each with distinct properties: models based on the
elastic net, sparse coding models and self-organizing models. The focus is on selforganizing maps, as these are the origins for the model presented in this thesis. In
addition, various papers which report multiple maps are discussed. The chapter ends
with open questions which might be answered by an all maps model.
In order to build an all maps model which is maintainable and understandable,
various changes to the software package in use, Topographica, are necessary. These
have been implemented for this thesis and are described in detail in chapter 4. Because
the underlying GCAL model is input-driven, it is essential to be able to create input
patterns covering various features. For example, an orientation map only emerges if the
input patterns have varying orientations. The input patterns for an all maps model have
to cover a number of different features, and modeling these features was standardized
and simplified. Furthermore, a superior way of defining models has been implemented.
A class-based system allows the splitting up of the model into levels, and reusing those
levels in multiple models. A novel way of modeling motion, based on multiple delayed
projections to V1, is also shown in this chapter.
The structure of an all maps model is described in chapter 5. Starting with a model
which only covers two dimensions, positional preference and orientation preference, it
is shown how other dimensions can be added to this model. Then the all maps model
is introduced, which is a combination of the other models.
Corresponding to the models discussed in chapter 5, the resulting maps are shown
and compared to previously published maps in chapter 6. There, it emerges that all
individual models produce maps which are comparable to previous publications, however the combined model does not yet produce cortical maps due to issues in determining the correct parameters in a large parameter space.
In chapter 7, a discussion of the architecture, methods and results is presented. This
also includes suggestions for future research.
Chapter 2
Biological background
This chapter first provides a brief introduction to the visual system of mammals. Then,
experimental findings are reviewed in regards to spatial feature maps in the visual
cortex of various species. The individual maps are first investigated separately, and
then their interaction is discussed. Furthermore, an overview how these maps evolve
during the development of animals is given.
Studying the visual system has several advantages over other sensory systems.
Firstly, the visual system covers a large area in the brain, with many neurons involved.
The early stages of the visual system are well understood and outlined below. From an
experimental viewpoint, it is relatively easy to conduct experiments, as the input can
be controlled easily. Also, vision is important for the animal behavior in general.
2.1
Visual system
In this section, an introduction to the visual system of mammals and various reasons
why the visual system is studied in this thesis are given. Also, it is important to understand the various stages of visual processing, as models of the primary visual cortex
build upon these principles.
Visual input is processed in the visual system, which is part of the central nervous
system. Photons emitted by light sources, and reflected by objects, hit the eyes. There,
in the retina, the visible range of wavelengths is sampled by two or three different cone
types. Most mammals are dichromatic, and therefore possessing only two cone types:
Short and Medium-Long. Humans possess three cone types, activated by light with
Short (blue), Medium (green) and Long (red) wavelength. Furthermore, there are rods
which are responsible for night-vision (Bear et al., 2006).
3
4
Chapter 2. Biological background
The retinal ganglion cells (RGC) in the inner layer of the retina encode the light
level at a given location. Furthermore, a pre-processing step is done: RGC only get
activated when there is a difference of light exposure of their center receptive field and
surround receptive field. On-center cells are excited by light in the center of their receptive field, and inhibited by light in the surround. Off-center cells show the opposite
behavior (Famiglietti and Kolb, 1976). Therefore, RGC are not activated in uniform
areas. Furthermore, there is no orientation preference in these cells. The sampling in
animals having a fovea is not uniform, instead there is a higher sampling rate of the
fovea compared to the periphery. There, the cones are both: smaller and higher in
their density (Schein, 1988). There are only very few isolated rod cells found in the
fovea (Wässle et al., 1995).
The activation is transmitted along the optic nerve to the optic chiasm, where the
nerves partially cross. The images of the inner side of each retina cross to the other
side of the brain, whereas the images of the outer side of the retinas are kept on the
same side. Then, input from the right visual field goes further along the left optic tract
to the left lateral geniculate nucleus (LGN) and vice versa (Crick and Asanuma, 1986).
The two lateral geniculate nuclei are located in the thalamus, where also other nuclei
are located, which process input from other sensory systems.
The geniculostriate pathway connects the LGN with the primary visual cortex. V1
is a slightly folded sheet of cells and is one of the most widely studied areas in the
brain. It consists of six horizontal layers, with incoming connections from the LGN
terminating in layer 4. Outgoing connections to higher areas depart from layers 2 and
3, and feedback connections to the LGN depart from layer 6 (Adler et al., 2011). For
this thesis, the cortical maps found in V1 are of particular importance and are presented
in more detail in section 2.2. For the interested reader, the paper by Crick and Asanuma
(1986) is recommended to gain insights into the anatomy and physiology of the cortex.
Interestingly, cortical maps are found for most sensory systems, not just the visual
system. For example, the auditory cortex and somatosensory cortex both show a topographic mapping (Udin and Fawcett, 1988). It even has been shown that the auditory
cortex develops similarly to the visual cortex if the retinal projections are rewired in a
way that the visual input arrives in the auditory cortex. This suggests that the underlying principles of development are shared across different brain areas, and that this
development is input-driven (Sharma et al., 2000).
In most mammals, V1 connects to several other higher visual areas. In monkeys
and humans, it is thought that two streams emerge: the ventral stream which projects to
2.2. Cortical maps found in animals
5
the inferior temporal cortex (IT) and the dorsal stream which projects to the posterior
parietal (PP) cortex (Mishkin et al., 1983). The ventral stream is thought to be related
with object recognition and identification, whereas the dorsal stream is thought to be
involved with the localization of these objects (Milner and Goodale, 1998). However,
these areas are not nearly as well understood as V1 (Kaas, 2001). Furthermore, in
some species like the least shrew, which is one of the smallest mammals, V1 directly
connects to the motor system with no further visual areas in between (Catania et al.,
1999).
2.2
Cortical maps found in animals
This section reviews a variety of cortical maps which are found in animals. Experiments showing which cortical maps exist in animals, which properties they have, and
differences in maps between species are crucial in evaluating models of the visual system. The maps presented in this section act as a reference to the maps which emerge
from the models built in chapter 5.
Neurons in V1 are organized in a retinotopic arrangement, i.e. nearby neurons in
V1 respond to nearby areas of the retina (Van Essen et al., 1984). However, they are
also selective for a variety of other dimensions. For example, it has been found that
neurons prefer stimuli which have a certain orientation, and most neurons prefer one
eye over the other (Löwel et al., 1988).
It is important to point out that a single neuron has preferences for many dimensions, i.e. a neuron has a preferred position on the retina, a preferred stimuli orientation
and a preferred eye. Although neurons respond the strongest to inputs which fulfill all
preferences, they usually also respond to stimuli which have similar features. In this
section, the individual maps which represent preferences for a certain feature are presented, and their interaction is discussed.
6
Chapter 2. Biological background
2.2.1
Measurement methods
Most of the studies mentioned below use optical imaging to measure cortical maps
in animals. First, the skull of the animal is removed, which exposes the surface of
the visual cortex. Then, visual patterns are presented and the response of neurons is
recorded. Usually sine gratings are used as patterns. Depending on the study, either the
absorbed light of the cortex is measured, or chemicals are applied to the cortex which
emit light when nearby neurons are active (Blasdel and Salama, 1986).
The preference of neurons is typically computed with differential imaging, i.e. two
images for complementary stimuli are recorded, and the difference of these two images
reveals areas which prefer one of the stimuli. For example, when measuring orientation
maps, one first captures an image for a particular orientation, and then subtracts the
image captured for the orthogonal orientation (Blasdel, 1992b). These steps are usually
repeated and averaged. Then, the responses for different stimuli are compared, and the
stimulus which is most effective to drive particular neurons emerges.
In the 1990’s, an alternative method to measure maps in a finer scale emerged.
Using two-photon microscopy, individual cells can be tagged with their feature preference (Swindale, 2006). The basic principle is that two photons have to hit a chemical
from different directions before light is emitted. This allows a non-blurry measurement
of single cells, in 2D as well as 3D (going into depth) (Denk et al., 1990). This method
is much more precise than optical imaging, however the area which can be measured
is smaller.
Early studies were made using microelectrodes, which were placed directly in
cells (Hubel and Wiesel, 1959). Although very precise measurements were possible,
the responses of only very few cells could be recorded. It did not allow the measuring
of cortical maps, but only preferences of single neurons.
2.2. Cortical maps found in animals
2.2.2
7
Retinotopic mapping
Retinotopy refers to the organized mapping of a receptive field position in the retina
to retinotopic coordinates in a brain area, usually the LGN or an area of the visual
cortex. This first has been discovered in wounded soldiers, where the area of blindness
of the visual field could be predicted from the brain area which was damaged (Holmes,
1918).
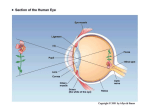
Figure 2.1: Mapping from the visual field (A) to the LGN (B) and V1 (C) in a macaque
monkey. The central 5 degrees are overrepresented. Figure reprinted from Connolly
and Van Essen (1984).
This was later verified using micro-electrodes. For example, retinotopic mapping
was shown in cats (Tusa et al., 1978; Tusa and Palmer, 1980), rats (Espinoza and
Thomas, 1983) and macaque monkeys (Van Essen et al., 1984; Connolly and Van Essen, 1984). In macaque monkeys, due to the fovea, the central 5 degrees in the visual
field occupy approximately 40% of the cortex.
2.2.3
Orientation map
Neurons in V1 are not only arranged in a retinotopic manner, but nearby neurons are
also often selective for similar orientations of stimuli. Nearby neurons with a similar orientation preference form iso-orientation patches. One can observe linear zones,
where the orientation preference changes slowly and continuously. Pinwheels are neurons near areas of all possible orientation preferences. The orientation selectivity of
8
Chapter 2. Biological background
these neurons is very low. Saddle points lie between pinwheel neurons, and show local
minima of orientation preference in orthogonal direction. At fracture lines, the orientation preference changes rapidly from one orientation to another (Blasdel, 1992b).
Orientation maps have been found in the primary visual cortex of animals such as
macaque monkeys (Blasdel, 1992b), tree shrews (Bosking et al., 1997), ferrets (Rao
et al., 1997) and cats (Löwel et al., 1988; Ohki et al., 2005). There, the general structure of orientation maps is similar, although for example there is a higher density of
pinwheels in ferrets compared to cats (Müller et al., 2000). In a rat V1 it has been
shown that although neurons are selective for orientation, nearby neurons do not have
preferences for nearby orientations (Ohki et al., 2005).
Using two-photon microscopy, Ohki et al. (2005) have validated the presence of
fractures, as well as pinwheel neurons with a low selectivity for orientation in cats.
(a) Orientation preference map found in V1
(b) Selectivity preference map in V1 of the
of a macaque monkey.
same macaque monkey.
is shown.
An area of 8x6mm
One can observe iso-orientation
patches, which result in pinwheels where sev-
Darker areas
correspond to less selective neurons,
typically near fractures and pinwheels.
eral iso-orientation patches come together.
Also, fractures can be seen, which are areas
where orientation preference changes rapidly
from one orientation to a very different orientation.
Figure 2.2: Orientation preference and selectivity maps of a macaque monkey primary
visual cortex. Both figures reprinted from Blasdel (1992b).
2.2. Cortical maps found in animals
2.2.4
9
Ocular dominance map
Neurons typically prefer inputs from one eye over input from the other eye. At the
same time, most neurons are binocular, i.e. they respond to inputs of both eyes. The
eye preference alternates in stripes (Blasdel, 1992a) or patches (Crair et al., 1997).
Features which are found in orientation maps, i.e. pinwheels, fractures and saddle
points, are not found in ocular dominance maps.
Figure 2.3: Orientation preference map found in V1 of a macaque monkey overlaid
by ocular dominance stripes. An area of 4x3mm is shown. One can see that ocular dominance stripes and iso-orientation patches tend to intersect orthogonally. The
same neurons have preferences for orientation as well as ocular dominance. Figure
from Blasdel (1992a), reprinted modified as in Miikkulainen et al. (2005).
Ocular dominance maps are found in several species, such as macaque monkeys (Hubel
et al., 1977; Blasdel, 1992a; Blasdel et al., 1995; Horton and Hocking, 1996), cats (Shatz
and Stryker, 1978; Löwel et al., 1988; Crair et al., 1997; Müller et al., 2000) and ferrets (Müller et al., 2000). In cats, ocular dominance maps are more patchy compared
to the stripy maps in macaque monkeys. Orientation patches and ocular dominance
patches usually intersect orthogonally in macaque monkeys (Blasdel, 1992a), and are
less pronounced in cats (Müller et al., 2000). Ferrets usually show a weaker relation
between orientation and ocular dominance maps (Yu et al., 2005). Pinwheels usually
lie in the center of ocular dominance stripes (Müller et al., 2000).
10
Chapter 2. Biological background
2.2.5
Disparity map
Several studies have shown that the response of neurons in the visual cortex depends on
the disparity, i.e. the positional offset of the stimuli from one eye to the other. In both,
macaque monkeys (Poggio and Fischer, 1977) and cats visual cortex (Barlow et al.,
1967) the response of these neurons were reported. This is thought to be important for
stereo vision, which can be used to detect obstacles or grasp objects.
Barlow et al. (1967) measured vertical as well as horizontal disparity, and found
that the response of neurons is more modulated by a horizontal offset. Some neurons
had a preferred disparity of up to 6.5 degrees of the visual field, whereas most neurons
preferred an offset between 0 and 3.5 degrees.
Unfortunately, to the authors knowledge there has not been an optical image study
measuring disparity, and therefore there is no large-scale disparity map for animals
recorded as yet. A micro-architecture for disparity recorded by two-photon imaging is
shown in figure 2.4.
Figure 2.4: Micro-architecture disparity map in a cat visual cortex.
An area of
0.3x0.3mm is shown (note that this is ≈ 100 times smaller than most other maps presented in this chapter). There, it emerges that on a small scale, disparity preference is
clearly organized. Figure reprinted from Kara and Boyd (2009).
2.2. Cortical maps found in animals
2.2.6
11
Direction map
Stimuli can be moved in various directions, and the preferred stimulus direction is
shown in direction maps. These have been found in cats (Ohki et al., 2005) and ferrets (Weliky et al., 1996), but not in macaque monkeys (Weliky et al., 1996). Direction
maps are similar to orientation maps, and show many fractures where the preferred
direction changes by 180 degrees.
Weliky et al. (1996) show that orientation and direction maps are closely related.
They find two opposite direction patches within a single orientation patch, whereas
the preferred directions are the two directions orthogonal to the preferred orientation.
They suggest that this is due to the need to represent all orientations and directions in
the cortex. As with orientation maps, direction maps show high continuity. However,
continuity in orientation maps seems more important than continuity in direction maps.
The direction preference may arise from lagged cells in the LGN. Some cells in the
LGN respond to the onset of a stimulus only after a certain delay, which can be 100ms
up to 1s. Nonlagged cells typically respond after 30-80ms (Saul and Humphrey, 1990).
(a) Direction map in V1 of a ferret. An area of
(b) Orientation map in V1 of a ferret overlaid
3.2x2mm is shown. One can see the abrupt
by direction arrows. An area of 1.4mmx1mm
changes from one direction preference to
is shown. One can see that within one orien-
another preference, often by 180 degrees.
tation patch, often two direction patches with
opposite direction preference emerge. Typically neurons with a low orientation selectivity, such as pinwheels, also show a low direction selectivity. The direction preference
is usually orthogonal to the orientation preference.
Figure 2.5: Direction preference map and orientation preference map with overlaid direction preference arrays. Both figures reprinted from Weliky et al. (1996).
12
Chapter 2. Biological background
2.2.7
Spatial frequency map
Spatial frequency refers to the number of sine gratings within a given distance. There
are more bars within a unit distance at a high spatial frequency compared to a lower
spatial frequency. As with orientation maps and direction maps, spatial frequency maps
tend to change smoothly and continuously. Most of the studies about spatial frequency
have been made in cats (Issa et al., 2001; Sirovich and Uglesich, 2004; Ribot et al.,
2013; Tani et al., 2012). In Nauhaus et al. (2012) spatial frequency maps of macaque
monkeys are computed.
In the macaque monkey, spatial frequency maps tend to intersect orthogonally with
orientation maps. Just like the relationship between orientation and ocular dominance
maps in macaque, Nauhaus et al. (2012) show that the relation of orientation and spatial
frequency maps is stronger in macaque compared to cats.
(a) Spatial frequency map in V1 of a
(b) Orientation map in V1 of a macaque mon-
macaque monkey. An area of 0.7x0.7mm
key. The spatial frequency contours are over-
is shown.
Similarly to orientation maps,
laid in black. An area of 0.7.07xmm is shown.
the spatial frequency preference changes
One can clearly see the orthogonal intersec-
smoothly. However, no pinwheels or other
tions of spatial frequency preferences and
features commonly found in orientation maps
orientation preferences.
can be found in spatial frequency maps.
Figure 2.6: Spatial frequency map and orientation map overlaid with spatial frequency
contours of a macaque monkey. Both figures reprinted from Nauhaus et al. (2012).
2.3. Map interaction
2.2.8
13
Hue map
There is evidence for color selective cells in V1, where color blobs emerge which
respond best to a particular color (Landisman and Ts’o, 2002). Most of the studies
related to color have been made in macaque monkey, see e.g. Landisman and Ts’o
(2002); Xiao et al. (2003); Xiao (2014). Xiao (2014) found overlapping responses in
the visual cortex when stimulated with different colors, whereas “the response peaks
shifted systematically as a function of the stimulus color” (Xiao, 2014).
Figure 2.7: Color selective cells found in area V1 of a macaque monkey. An area of
3.75x3mm is shown. Figure reprinted from Xiao et al. (2007).
2.3
Map interaction
The last section presented all known cortical maps in animals. Here, the interaction of
these maps is discussed. This is important, as the aim of this thesis is to build an all
maps model of the primary visual cortex. Not only should the individual maps match
those found in animals, but also the interaction between these maps.
Selectiveness for a particular feature, such as ocular dominance, is likely to affect
the selectiveness for another feature, such as orientation. This section discusses some
of the experimental findings which support this hypothesis. Furthermore, in regards to
the thesis’ aim to build an all maps model, it is important to note that the previously
mentioned experiments were made in various species, and it is not known whether a
single species is selective for all the spatial features, or just a subset of them.
In the late 1960’s, orientation columns and ocular-dominance columns were found
in macaque monkeys using electrode measurements Hubel and Wiesel (1968). Using
optical imaging, it emerged that they usually intersect orthogonally in macaque monkeys Blasdel (1992a). However, in cats and ferrets this relationship is not nearly as
14
Chapter 2. Biological background
strong (Müller et al., 2000; Yu et al., 2005).
Furthermore, there seems to be agreement that pinwheels found in the orientation
map usually lie in the center of ocular dominance stripes (Müller et al., 2000). This
suggests a relationship where neurons which are highly selective for ocular dominance
are less selective for orientation. Computational models might help to propose similar
relationships between other spatial maps, which then could be validated in animal
studies.
A clear relationship is also seen between orientation and direction maps. In ferrets,
it has been shown that within one iso-orientation patch there are often two direction
patches, with an opposite direction preference. Also, the direction preference is orthogonal to the orientation preference. In Miikkulainen et al. (2005), it is suggested that
in theory direction patches rather than orientation patches could become the largestscale organization, in the case animals are raised in an environment with high speeds
of visual motion.
Landisman and Ts’o (2002) show that color patches tend to cross ocular dominance
columns. Also, it seems as if the color patches contain binocular color-selective cells.
The same experiments also suggest that color blobs exclude orientation maps from
forming in the vicinity.
2.4
Map development
This section outlines the cortical map development in animals. There is clear evidence
that cortical maps change considerably in the first weeks and months after birth, and
that visual input partly drives these alterations. The cortical maps in the all maps
model built for this thesis also gradually evolve over time, and therefore discussing
which principles might be responsible for the map development is of great value.
In a comparison of normal cats and cats which lids were sutured before eye opening, it was found that orientation and ocular dominance maps in these cats developed
identically within the first three weeks after eye opening. However, the maps developed differently after this time. In normal cats, the orientation selectivity remains high,
whereas in binocular deprived cats the selectivity as well as responses to visual input in
general decrease. That suggests that the basic structure of cortical maps exists at birth,
but needs visual experience to stay intact (Crair et al., 1998). Similarly, macaque monkeys raised in darkness also form ocular dominance columns (Horton and Hocking,
1996).
2.4. Map development
15
Retinal waves are thought to be responsible for the basic structure of cortical maps
at birth. A retinal wave is spontaneous activity on the retina, and retinal waves are drifting across the retina. By blocking spontaneous activity, the anatomical organization of
ocular dominance columns is destroyed irreversible (Huberman et al., 2006). Therefore, retinal waves might be “an evolved adaptation (...) imparting an informational
robustness and redundancy guide” (Ackman and Crair, 2014).
Chapter 3
Model background
A computational model of the visual cortex is an implementation of a theory of how
the visual system works. The theory is formed by the experimental findings presented
in chapter 2, and these findings are used to validate the theory. It should also be possible to make predictions using these models, which then can be verified in animals.
The visual system should be modeled in enough detail so it can be compared to animal studies, however it should omit everything beyond that so it is simple enough to
understand it (Miikkulainen et al., 2005).
In this chapter, various models resulting in biologically realistic maps are presented. The models are categorized into three main groups. Each group is presented
individually, and their similarities and differences are pointed out. The chapter also
provides a brief overview of contributions that these models have made for today’s
understanding of the visual cortex.
3.1
Sparse coding
Sparse coding models are closely related to the area of computer vision. There, the
independent component analysis, which is a special case of sparse coding, is widely
used. Although there is no known model covering particularly many input dimensions
simultaneously, the concept of sparse codes are also important for understanding the
GCAL model, and therefore they are presented in this thesis at some length.
Sparse coding is based on the finding that only a small subset of all neurons is active
at any time t, and the pattern of activation represents information in the brain (Rolls
and Tovee, 1995). For each input pattern, a different subset of neurons is activated.
This system can be built in a way so it is optimal for input patterns with known sta17
18
Chapter 3. Model background
tistical properties, e.g. natural images (Hyvärinen and Hoyer, 2001). This is thought
to have different advantages in respect to the energy consumption, storage capacity,
and data representation. Furthermore, the coding is simple to decode at subsequent
stages (Olshausen and Field, 2004).
Sparse codes provide a compromise between dense and local codes. Imagine a
set of N binary neurons, i.e. they are either active or inactive. In local codes, each
neuron is only active for exactly one input pattern. Therefore N different patterns can
be represented, which is likely to be a too small number, even for billions of neurons
in a brain. Dense codes are the other extreme, where on average 0.5 × N neurons are
active at any time. This would allow the representation of 2N patterns, a far too large
number given the number of neurons in the brain. Therefore, most capacity would be
redundant, and decoding patterns would be extremely difficult as all neurons have to
be taken into account. Sparse codes are in between these two extremes, using a small
fraction of neurons to represent patterns (Földiák, 2002).
Mathematically, an input image I(x, y) is modeled as a superposition of n basis
vectors ai (x, y):
n
I(x, y) = ∑ ai (x, y)si
(3.1)
i=1
The si are coefficients which have to be calculated for each image, such that on average the activation is sparse. This is achieved by fixing the expectation E{s2i } to a
desired activation value, and then using a convex function G to measure the sparse-
Figure 3.1: This figure compares random samples from a Gaussian variable (top) and
sparse variable (bottom). One can see that the sparse variable is close to zero at
most times, with some large values in between. The Gaussian variable has more nonzero values, but less extremes. The random observations were made using the same
variance for both variables. Figure reprinted from Hyvärinen et al. (2009).
3.2. Elastic net models
19
ness: E{G(s2i )} (Hyvärinen and Hoyer, 2001).
In Hyvärinen and Hoyer (2001) it has been shown that a sparse coding algorithm
can account for position, orientation and frequency preference. Using independent
component analysis, it has also been shown how color and disparity preference can
emerge (Hyvärinen et al., 2009). Most of the recent work focuses on application of
sparse representation in more complex visual tasks, such as visual tracking (Zhang
et al., 2013) and image annotation (Liu et al., 2014).
3.2
Elastic net models
The elastic net is a regularization method known from statistics and machine learning.
It has also been employed to build models which result in maps similar to those in
animals, where the focus is trying to determine why cortical maps in biology have the
properties observed in studies, rather than building a visual system (which is the aim
of GCAL).
The elastic net combines the ridge regression and LASSO regularization methods. Both methods aim to minimize the coefficients of the variables, whereas ridge
regression uses the L2 norm and LASSO regularization uses the L1 norm. In practice,
LASSO leads to sparse solutions, i.e. most coefficients are nearly zero, and ridge regression leads to dense solutions, i.e. most coefficients are non-zero. The elastic net
algorithm also produces sparse solutions, but in comparison to LASSO highly correlated variables all have non-zero coefficients, rather than picking one of the correlated
variables.
In Carreira-Perpiñán et al. (2005) a model based on the elastic net resulting in maps
for positional preference, orientation, ocular dominance and spatial frequency is presented. There, the elastic net is used to optimize a trade-off of the coverage of the
stimulus space, i.e. “any combination of stimuli values is represented somewhere in
cortex” (Carreira-Perpiñán and Goodhill, 2002), and continuity, for example, retinotopy or iso-orientation patches. The stimuli are represented as vectors, whereas each
vector entry represents one feature dimension. As in animal studies, pinwheels which
lie in the center of ocular dominance stripes emerge, and maps have the tendency to
intersect orthogonally.
The elastic net also has been used to investigate the differences in maps of various
species. As discussed in 2.2.4, ocular dominance maps are patchier in cats compared
to stripy maps in the macaque monkey. Using the elastic net, it has been suggested
20
Chapter 3. Model background
that this is due to the relative order of the map development. It seems that orientation
maps develop before ocular dominance maps in cats, and vice versa in the macaque
monkey (Goodhill and Cimponeriu, 2000).
3.3
Models based on self-organizing maps
The GCAL models built for this thesis have their origin in the self-organizing map
by Kohonen (1982). First, the original algorithm is presented. GCAL as an extension
to the SOM which can account for more developmental and functional phenomena is
described after, whereas the GCAL model has less artificial limitations, and a higher
degree of biological realism.
3.3.1
Self-Organizing Map
A self-organizing map is a network of neurons, typically arranged in a two-dimensional
grid. Each neuron has a weight vector associated, which maps the usually highdimensional input space to the two-dimensional grid. A neighborhood function is
employed so that inputs which only differ slightly are mapped to nearby areas of the
network (Kohonen, 1990). In case of a cortical map, this neighborhood function can
be seen as lateral interaction between neighboring neurons. These have been found
experimentally in animals, see for example Gilbert et al. (1990).
During training, the network learns as follows: First, the activity of all neurons is
calculated as the weighted sum of the input vector V = {v1 , v2 , ..., vn }, v ≥ 0 and weight
vector Wi j = {w1,i j , w2,i j , ..., wn,i j }:
→
− →
−
ηi j = k V · W i j k
(3.2)
Then, the neuron (r, s) with the highest activation is determined. This neuron implicitly gets the maximal activity ηmax assigned in equation 3.3. This step is important
so that the whole input space is covered, even for an initially bad match. As the neighborhood function, a Gaussian can be used and the activity for all other neurons is
calculated as follows, whereas (i, j) is the grid position of the neuron:
(r − i)2 + (s − j)2
hrs,i j = ηmax exp −
σ2h
(3.3)
The parameter σh controls the width of the Gaussian function, which is gradually
decreased over time. It has to start out large as the initial weights are random, and
3.3. Models based on self-organizing maps
21
therefore the activity patterns are random as well. Using the learning function in equation 3.4, the activity pattern is concentrated around the winning neuron after a certain
training period, which then needs a Gaussian which is narrower (Kohonen, 2001).
As learning rule, the mechanism proposed by Hebb is employed, which states that
a connection is strengthened when two neurons fire at the same time (Hebb, 1949):
w0k,i j = wk,i j + αvk hrs,i j
(3.4)
Where k is the k-th component of the weight/input vector and α is the learning rate.
Often the normalized version of the Hebbian learning rule is used, where the sum of
the weights is constant. This is necessary so that the weights do not become instable
due to ever-increasing values (Rochester et al., 1956).
Using this version of the self-organized map, a retinotopic mapping emerges when
feeding the network with Gaussian input patterns located at a random position. As in
animals (see section 2.2.2), neurons in the center of the network respond to centrally
located input patterns, neurons at the edge of the network respond to inputs at the edge
of the receptor; and nearby neurons respond to input patterns with nearby location. If
there is a higher probability for certain locations in the input space, there will be more
neurons selective for these locations compared to under-represented locations (Ritter,
1991). To rephrase this: the resources (neurons) are allocated according to the input
distribution, and therefore the statistics of the environment are encoded.
This version of a self-organizing map has certain drawbacks. Firstly, picking a winner is biologically implausible. There is no known mechanism which could supervise
this behavior. Secondly, a full connectivity between the neurons is required, which
is again not biologically realistic. Furthermore, the lateral connections are isotropic,
which contradicts known animal studies, where lateral connections are mainly existent
between neurons preferring the same orientation. It is also unclear how the radius σh
could shrink over time in an animal (Miikkulainen et al., 2005). In addition, the initial
connections on the visual pathway are roughly retinotopic, as axons follow signaling
gradients (Tessier-Lavigne and Goodman, 1996).
The self-organizing map implicitly makes use of two concepts which allow mapping of a higher dimensional space to a low dimensional space. The first concept is the
principal surface, which takes advantage of the fact that input dimensions do not vary
independently. For example, the direction of a pattern must be roughly orthogonal to
its orientation so a movement can be seen. As this is often not enough to map the input
into two dimensions, folding is another technique that can be used. There, a curve first
22
Chapter 3. Model background
stretches along the dimensions with the highest variance, and then makes tight turns
across the width of the area to cover the remaining dimensions (Miikkulainen et al.,
2005).
3.3.2
Gain Control, Adaptation, Laterally connected model
The standard GCAL model consists of four two-dimensional sheets:
1. The photoreceptor sheet, which can be fed with any two-dimensional input pattern, e.g. Gaussian patterns or natural images. The activation Ψi (t) of each unit
i at time t typically ranges between 0.0 and 1.0.
2. Two sheets representing the preprocessing done in the retinal ganglion cells (and
transmitted to the lateral ganglion nucleus): One On and one Off sheet, modeling
the difference of light exposure between the center and the surround of retinal
ganglion cells, as described in section 2.1. This is abstracted by Difference-ofGaussian afferent connections from the photoreceptor sheet. Each unit in the
On/Off sheets connects to multiple units in the photoreceptor sheet, forming
a receptive field. Neighboring units have different, but overlapping receptive
fields. Units in the On sheet respond to bright areas surrounded by dark areas,
and vice versa. Furthermore, gain control is employed to allow a wide range of
input contrasts.
3. The V1 sheet, which is connected to the On/Off sheets. In comparison to the
self-organizing model, each unit only connects to a small area of the On/Off
sheets. Units also connect laterally to surrounding units in V1, with short-range
excitatory as well as long-range inhibitory connections. These lateral connections sharpen the response. The inhibitory connections are non-isotropic, allowing representation of long-term correlations of the input patterns. Furthermore,
the encoding is more efficient using lateral connections, as redundancy in the
input is suppressed, which then allows detecting changes in the input more efficiently (Sirosh et al., 1996).
For the LGN sheets, gain control is employed, which ensures that the model is
robust for varying input contrast. The activation η j,O (t + δt) of a LGN unit at position
j on sheet O for time t + δt is calculated as follows:
η j,O (t + δt) = f
γO ∑i∈Fj,P Ψi (t)ωi j
k + γS ∑i∈Fj,S ηi,O (t)ωi j,S
!
(3.5)
3.3. Models based on self-organizing maps
23
Where f is a half rectangle, ensuring that the response is always positive, γO is
a boost factor chosen so that the unit activation is normally between 0.0 and 1.0. F
denotes the projection fields, FP for the afferent projection and FS for the lateral connections, which suppress highly active units. k ensures that the denominator is always
positive, and γS is a rescaling factor. The weights ωi j from unit i in the photoreceptor
sheet to unit j in the On/Off sheets is given by a Difference of Gaussians, with a smaller
center and wider surround. For the On sheet, the surround is subtracted from the center
and vice versa. For the exact values of the constants, see Stevens et al. (2013).
Units in V1 receive afferent connections A from the On/Off sheets, lateral excitatory connections E from surrounding sheets, and longer range lateral inhibitory connections I. The initial activation is calculated purely from the afferent connections,
which have an initially Gaussian shape. Then, there are several settling steps which
purely depend on the activation of the surrounding sheets. The activation η j,V (t) of V1
unit j at time t is the half-rectified sum of the activity of the projections p = (A, E, I):
!
η j,V (t) = f
∑ γp ∑
p
ηi,p (t)ωi j,p
(3.6)
i∈Fj,p
With ηi,p (t) as the activation of the afferent/laterally connected units, ωi j,p as the connection strength from unit i to unit j for projection p and γ p to weight the different
connection types. Here, f has a variable threshold aiming to bring the average of
the activity values of a unit to a desired value. For the detailed adaptation process,
see Stevens et al. (2013).
Then, a normalized Hebbian learning rule with learning rate α is employed to update the weight ωi j,p from unit i to unit j of projection p:
ωi j,p (t) =
ωi j,p (t − 1) + αη j ηi
∑k ωk j,p (t − 1) + αη j ηk
(3.7)
Using this basic model, biologically realistic orientation maps result for a wide
range of input contrasts. The map development is stable, i.e. only after a relatively
short training, the maps have similar properties to those found in animals. Furthermore,
statistics in the input patterns are reflected on the resulting maps. This is demonstrated
by simulating a goggle-reared environment, where one orientation is dominating the
visual scene (Stevens et al., 2013).
24
Chapter 3. Model background
(a) Network structure of the basic GCAL model, with
(b)
Resulting
orientation
map
one photoreceptor sheet which projects into one On
in GCAL. The histogram shows
sheet and one Off sheet. The extend of the connection
that all orientations are equally
fields are shown with orange cones. Red circles repre-
represented.
sent lateral connections. For the On/Off sheets, these
are as wide as the connection field projection down
from a single V1 unit. For the V1 sheet, the lateral excitatory connections are shown with the smaller circle,
and the inhibitory connections are shown with a wider
circle. Figure reprinted from Stevens et al. (2013).
Figure 3.2: Structure of the basic GCAL model, and resulting orientation map when
Gaussians are used as input patterns.
3.3.3
Multiple maps using GCAL
Earlier studies using the predecessor of GCAL, the Laterally Interconnected Synergetically Self-Organizing Map model (LISSOM), it has been shown that using the same
principles as introduced above, it is possible to explain a wide variety of cortical maps.
Here, the methods which were used to extend the basic LISSOM model to model multiple maps are presented together with the corresponding papers.
Orientation + Color
For color simulations, multiple retina sheets are used, each of them representing a
particular cone type. For a dichromatic simulation, one sheet for medium wavelength
(green) and another sheet for long (red) wavelength are used. Rather than just one pair
3.3. Models based on self-organizing maps
25
of On/Off sheets, three pairs of these sheets are required. One pair with units which get
their center afferent input from the green photoreceptor sheet, and their surround from
the red photoreceptor, and another pair where the center and surround is swapped, as
well as a pair of luminosity sheets which is connected to both photoreceptor sheets.
The units in V1 connect to all sheets (Bednar et al., 2005).
Units in V1 typically become selective for either orientation, or one of the color
channels. That is, if a neuron is highly selective for orientation, it has nearly no preference for color. Similarly, if a neuron is selective for a specific color, it is neither
selective for other colors nor for orientation.
(a) Required sheets and projections for a color simula-
(b) Resulting orientation map,
tion. In comparison to the basic LISSOM/GCAL model,
whereas color blobs are sur-
there are several photoreceptor sheets representing the
rounded by black lines.
various cone types found in animals. They project into
blobs have a low orientation se-
two pairs of LGN sheets which are color-selective and
lectivity, which is denoted by
one pair of luminosity sheets which equally receives input
brighter colors.
Color
from all photoreceptor sheets.
Figure 3.3: LISSOM model for a dichromatic color simulation and the resulting maps.
Both figures reprinted from Bednar et al. (2005).
26
Chapter 3. Model background
Orientation + Spatial frequency
To model spatial frequency, the visual pathway again has to be modified. Similarly
to the color model, further LGN sheets have to be introduced. For spatial frequency,
each spatial frequency channel (consisting of an On/Off sheet pair) has a different size
of receptive fields in the photoreceptor sheet. Therefore, the channels have varying
selectivity for different frequencies of the input pattern. This also implies that the sizes
of the sheets differ between the channels because of the required edge buffering.
It has been found that the spatial frequency range widens if a unit in V1 only
connects to one of the spatial frequency channels rather than all of them (which is
achieved by pruning the weak connections after an initial training), however this comes
with the cost of distorted orientation maps (Palmer, 2009).
Figure 3.4: Resulting spatial frequency map and orientation map of a LISSOM simulation with multiple LGN sheets selective for different spatial frequencies of the photoreceptor sheet. Figure reprinted from Palmer (2009).
Orientation + Ocular dominance + Direction
The model presented in Bednar and Miikkulainen (2006) extends the basic LISSOM
model by two dimensions, ocular dominance and direction. To model ocular dominance, two retinas are used, corresponding to the two eyes of mammals. Ocular dominance maps result from brightness differences, i.e. the input pattern is brighter in one
of the two eyes. The brightness difference is randomly distributed, in a way that the
activities sum up to 2.0.
Direction preference is achieved with multiple lagged LGN sheets. The input pattern first arrives at lag N = 3 at time t, and is then moved slightly before lag N − 1 is
activated at time t + 1 and so forth. These differences in time result in spatiotemporal
3.3. Models based on self-organizing maps
27
fields. This is described in more detail in section 4.3, where also other ways to model
motion are presented. Also, in figure 4.1a the model structure is shown.
In Miikkulainen et al. (2005), it has been shown that differences in the pattern
location between the eyes, also known as disparity, does not result in biologically
realistic ocular dominance maps. Disparity would be a more intuitive way to model
ocular dominance, as animals encounter this every day due to the displacement of the
eyes, as opposed to non-intuitive dimming differences.
In Burger and Lang (1999) and Burger and Lang (2001) a model which has a very
similar structure to this model is presented, however does not implement direction
maps. Using random stimulus patterns (in contrast to Gaussian input patterns / natural
images used in LISSOM/GCAL), orientation and ocular dominance maps emerged.
All maps model
In a previous project, LISSOM was used to build an all maps model. This model shows
that in principle it seems possible to combine all cortical maps found in animals in a
single simulation. Basically, the presented models of section 3.3.3 are all combined
into one model. One exception is a different motion model which was used in this
simulation, which uses several lagged retina sheets rather than lagged LGN sheets (see
4.3). This is biologically not plausible and computationally expensive, as per lagged
retina the corresponding lagged LGN sheets have to be added to the simulation as
well (Gerasymova, 2009).
When simulating all dimensions, the model complexity is tremendous. There are
24 retina sheets, resulting of 2 eyes * 4 time lags * 3 cones. Per time lag and eye,
there are eight LGN sheets for color processing and two LGN sheets modeling spatial
frequency, so in total 2 ∗ 4 ∗ (8 + 2) = 80 LGN sheets. The model structure is not shown
in a figure due to the high complexity, which can be reduced significantly, as shown in
section 5.9.
Besides the high complexity and the biologically unrealistic lagged retina sheets,
the model has certain other drawbacks. The combination of the ocular dominance and
color dimensions is not realistic, as the brightness difference to model ocular dominance is applied per color channel in the RGB color space. This means that if the
activation of the red channel in the left eye is RLe f t , then the activation in the right eye
28
Chapter 3. Model background
is calculated as RRight = 2.0 − RLe f t . As this is done for each channel, the hue1 for a
specific unit differs between the left and right eye. This leads to a strong change in the
color map, where the preferred hue is shown.
From a software point of view, the model is highly inflexible and difficult to maintain. The various components cannot be easily replaced, for example, it is not possible
to use GCAL instead of LISSOM.
A unified model which is much more comprehensive and also models of all known
cortical maps has been suggested in Bednar (2012), however this paper reports results
from different models covering subsets of all dimensions. An implementation is described as “very much a work in progress” (Bednar, 2012) and is aim of this thesis.
The proposed model contains only three sheets per eye, one per cone type, compared
to the 12 retina sheets in the work from Gerasymova (2009). Because motion is modeled with delayed projections from the LGN to V1, only 20 LGN sheets are required.
The model structure is not shown in a figure as it is very similar to the combined model
presented in section 5.9.
In this thesis, the focus is on replicating maps which are similar to those found in
animals. The paper by Bednar (2012) shows how a unified model could also explain a
variety of other findings, such as contrast-invariant tuning, the properties of simple and
complex cells in the cortex and aftereffects. However, these explanations are beyond
the scope of this thesis.
Input patterns for multiple map simulations
In the previous section, it has been shown how the basic GCAL model can be extended
to cover various dimensions. This usually requires the extension of the model with
retina and/or LGN sheets. However, besides adjusting the model structure, the input
patterns have to be adjusted as well. For example, if the input patterns of the left and
right eye are exactly the same, no ocular dominance map will develop. Even in the
basic GCAL model an orientation map only emerges because the orientation of the
Gaussian input patterns is random (Miikkulainen et al., 2005).
For ocular dominance simulations, the brightness of the input patterns has to vary.
A related but different input dimension is known as disparity. A disparity map emerges
only in the case the pattern locations in the left and right eye differ. For the motion
1 The
hue value of the color is a measure where the color is found in the color spectrum, independently of its brightness which is encoded in the value or lightness and the pureness which is described
by the saturation in the HSL/HSV color spaces (Joblove and Greenberg, 1978).
3.4. Open questions
29
model, the input pattern has to be moved over time. Similarly, the spatial frequency of
input patterns has to vary so that a spatial frequency map emerges. As for color, these
dimensions are inherent to natural images.
Here, the fact that the input statistics are reflected on the resulting maps has to
be stressed. For example, if cardinal orientations are overrepresented in the input,
as they usually are in natural images, then more neurons become selective for these
orientations, compared to underrepresented orientations (Stevens et al., 2013).
For the GCAL model, any artificial two-dimensional input patterns such as twodimensional Gaussians or natural images can be used. Using Gaussian patterns has the
advantage that the parameters can be controlled more easily.
3.4
Open questions
Although computational modeling has successfully been used to provide various hypotheses of how the visual system in general, and cortical maps in particular, might
evolve and what their function might be (see Goodhill (2007); White and Fitzpatrick
(2007); van Ooyen (2011) for reviews), there are still many open questions. Here, two
of them have been chosen which are particularly interesting because it may be possible
to provide an answer using an all maps model.
Using vector-like inputs similar to the ones which are used in the elastic net, the
self-organizing map was applied without modifications to model multiple maps. In the
paper by Swindale (2000), the question is raised how many maps can be represented in
the two-dimensional visual cortex. This is important, as there might be undiscovered
cortical maps. Furthermore, this would allow statements about the interaction of maps.
With theoretical assumptions beyond the scope of this thesis, the author suggests that
there might be an upper limit of nine or ten maps. The interested reader might also
want to read a follow-up study in Swindale (2004).
The same author proposes that maps might be optimized for uniform coverage, i.e.
whatever combination of input features one presents to the cortex, the total neural response is independent of this combination (Swindale et al., 2000, 2002). However, another study doubts that the way coverage was measured was correct (Carreira-Perpiñán
and Goodhill, 2002). Whether the assumption of uniform coverage is correct or not
remains an open question, and a model of all known spatial maps could be used to
develop this further.
Chapter 4
Architecture
This chapter introduces three main concepts necessary to build an all maps model in
Topographica, a software for simulating cortical maps (Bednar, 2009).
It is crucial to generate patterns which cover all dimensions one wants to model,
due to the input-driven self-organization of the model. With the former implementation
it was difficult to generate complex patterns, and hard to extend more dimensions.
Here, the concept of feature coordinators is introduced, whereby each coordinator adds
one more dimension. The pattern coordinator acts as a convenient wrapper to use the
feature coordinators.
The submodels machinery is one of the main contributions of this thesis. Automatic
wiring of sheets, easier setting of parameters and the ability to modify and inspect the
model structure before instantiation are a few of the advantages gained by using this
new concept. The superiority of this implementation over the previous is especially
obvious for models with many sheets and projections between them. The old results
can be replicated if needed, but it becomes much more clear how the model structure
emerges in the new system.
The last concept discussed is a new motion model. Direction maps can emerge
in many types of temporal delays within the model. Previously, this has been done
with a set of lagged retina sheets or a set of lagged LGN sheets. Here, following the
suggestion in Bednar (2012), multiple projections with increasing delays from LGN
sheets to V1 are used to model motion.
31
32
Chapter 4. Architecture
4.1
Pattern generation
As described in section 3.3.3, it is crucial that input patterns cover the feature dimensions one wants to model. In the case of Gaussian input patterns, for example, the
model of V1 will not develop orientation-specific neurons if all Gaussian patterns are
oriented the same way. On the other hand, if one only wants to model position preference (without orientation preference), it is important that all Gaussians have the same
orientation. Using oriented Gaussian patterns does, however, alter the position preference map. In order to build a model that covers various feature dimensions, it is
therefore crucial to have a mechanism that allows the ability to specify the needed feature dimensions of the input patterns, and the synthesis of the feature dimensions (if
needed). For this thesis, two concepts called feature coordinators and pattern coordinator have been implemented, and they are described in detail in this section.
4.1.1
Feature coordinators
A feature coordinator modifies an input pattern in some way, and returns the modified
input pattern. A feature is something coordinated between input patterns. This could
be either a parameter of an input pattern (such as the size), or a variable from which
values for an existing parameter can be calculated (such as a position offset). Each
input to the model can consist of one or more overlaid input patterns.
Each feature coordinator synthesizes exactly one feature dimension. This allows
any arbitrary combination of feature dimensions by applying the desired feature coordinators in a serial manner (see section 4.1.2). By supplying the name of the pattern
generator to the feature coordinators, it is possible to coordinate a set of patterns across
multiple retinas.
Position feature coordinators
The position feature coordinators are necessary in order to develop a position preference map. There are two position feature coordinators, one for modifying the x coordinate of a supplied pattern and the other for modifying the y coordinate. By default,
the position is altered around the point of origin by a uniform random number (within
set bounds) provided as a parameter.
4.1. Pattern generation
33
Orientation feature coordinator
The orientation feature coordinator modifies the orientation of a supplied pattern, by
default to a uniform random number between -π and +π. This allows development of
an orientation map.
Spatial frequency coordinator
The spatial frequency coordinator varies the sizes of the input patterns in order to
develop a spatial frequency map. Two parameters are supplied to this coordinator: the
spatial frequency spacing Γ and the highest spatial frequency channel υmax . The spatial
frequency spacing corresponds to the factor by which successive spatial frequency
channels increase in size. The size of the supplied input pattern is multiplied by a
uniform random number between one and Γυmax . This corresponds to sizes which suit
the receptive fields of the spatial frequency channel with the smallest receptive fields
up to sizes which suit the channel with the biggest receptive fields.
Motion feature coordinator
The motion coordinator sweeps the supplied pattern orthogonal to its orientation. At
each time step, the pattern is moved further. The speed of the sweeping can be adjusted
by a parameter, as can the amount of time required before showing a new pattern to
the model. Further details are explained in section 4.3.
Dimming feature coordinator
In order to get realistic ocular dominance maps in GCAL based models, it is necessary
to introduce dimming differences of patterns in the left and right retina. This will be
discussed in more detail in section 6.3. Dimming differences can be achieved with the
dimming feature coordinator. The coordinator can only be used with two retinas, and
is implemented such that the brightnesses of the two input patterns add up to 2, i.e. if
the brightness of the left input pattern is 0.7, the brightness of the right input pattern
must be 1.3. The fraction by which the pattern brightness varies between the two eyes
can be supplied as parameter, and is again created within a uniform random number
generator.
34
Chapter 4. Architecture
Disparity feature coordinator
The disparity (difference of pattern locations) of two input patterns is coordinated by
the disparity feature coordinator. Currently, this only works for horizontal offsets, but
could be easily extended to allow vertical offsets as well. In practice, the x-coordinate
of the input pattern is shifted to the right in one retina, and by the same amount to
the left in the other. The amount of shift is controlled by a uniform number generated
between zero and a parameter ξmax .
Summary feature coordinators
This section introduced the concept of feature coordinators and described each feature
coordinator in detail. The coordinators can be applied in any arbitrary order because
the parameters of the supplied patterns are not overridden, but modified. The only
exception is the motion coordinator, which has to be applied after the orientation coordinator, because the motion is calculated orthogonal to the orientation of the pattern.
The implemented coordinators can synthesize most input dimensions, except for
color. However, adding more feature coordinators is straightforward due to the common interface and atomic operation of each individual feature coordinator. A mathematically more precise definition of the feature coordinators can be found in the corresponding sections of chapter 5.
4.1.2
Pattern coordinator
The pattern coordinator is a newly introduced concept which allows using the feature
coordinators presented earlier in a user-friendly way. The pattern coordinator is a class
which can be instantiated, and the only required parameter on instantiation is a list of
the desired dimensions to be contained in the returned input patterns. Internally, there
is a mapping to a particular feature coordinator for each dimension. Furthermore, one
can specify the names of the returned input patterns, which implicitly allows setting of
the number of input patterns.
Initially, each input pattern is created with default parameters; and all parameters
set to their default values. E.g. the x, y and orientation parameters are all set to 0.
The appropriate feature coordinators are then applied to these input patterns, which
gradually synthesizes more and more dimensions of the patterns. Finally, the individual patterns are passed to a composite generator, which returns the input pattern. It
is worth mentioning that this concept is general with respect to the number of input
4.1. Pattern generation
35
patterns returned, i.e. more than two input patterns can be created, thus allowing the
modeling of animals with more than two eyes, e.g. three-eyed Rana pipiens (Reh and
Constantine-Paton, 1985).
Pattern coordinator for images
In order to use images as inputs, a special class has been defined. This class allows the
reading of all images from a specified folder, and the building of input patterns from
them. Because some of the dimensions are inherent to images, the corresponding feature coordinators are skipped - namely, the orientation coordinator, color coordinator
and spatial frequency coordinator are skipped by default.
The pattern coordinator for images also allows the filename of the images to be
specified with templates. This is useful in the case that even more dimensions are
inherent to the image dataset. For example, the scenario in which one folder is not
enough to ensure the relationship of the corresponding left and right images in a stereo
image dataset is maintained. This can be circumvented by using filename templates
with patterns that are replaceable depending on whether the pattern is used as left or
right input pattern. Because the concept is very general, this not only applies to stereo
image datasets, but also to videos supplied to a model as successive images.
Summary pattern coordinator
The pattern coordinator provides default implementations with a standard set of parameters for common manipulations of input patterns. This has the advantage that the
modeler does not need to specify them in detail. However, if needed, the modeler can
override the behavior of certain feature coordinators by setting their parameters appropriately, or even decide to implement a new feature coordinator for a certain feature.
In general, this is not needed, and therefore a high-level interface to input patterns was
created.
This also reduces the duplication of code considerably where, previously, input
patterns were created within the model files. When creating a new model, the input
pattern generation was usually copied from another file for convenience and then altered to ensure the desired dimensions were covered. Therefore, the input pattern generation was duplicated across models, but contained many small differences depending
on the used image dataset, the number of eyes, and whether, for example, motion was
modeled. This approach was very fault prone.
36
Chapter 4. Architecture
Using the pattern coordinator class, a new instance of the class can be created,
and the desired dimension for modeling is the only required parameter. Switching to
an image dataset from an artificial stimuli such as Gaussians is also straightforward,
as the only change necessary being the instantiation of an image pattern coordinator
class rather than a normal pattern coordinator class. The parameters do not need to be
changed. This also allows the comparison of the resulting maps of different models, as
one can enforce the use of exact same input patterns across models.
4.2
Submodels
In section 4.1, a method for unifying the input patterns across model files was presented. Here, a mechanism to reuse so-called submodels across various models is
described. This reduces the code duplication to a minimum while, at the same time,
making differences across models easily visible. Furthermore, it allows for the parameters of the model to be changed before instantiation, and the structure of the model
can be explored before model instantiation. This is important, as instantiating a model
is expensive in terms of both time and memory consumption.
4.2.1
Previous implementation
So far, a model was created in a single file typically consisting of the following sections:
1. Import declarations
2. Input pattern generation
3. Sheet instantiation
4. Connecting sheets
5. Setup of analysis methods
The first section was typically shared across all model files, and imported various
classes from Topographica.
The second section was similar across the model files, but with slight differences
depending on the dimension one wants to model, as described in 4.1.2.
In the third section, the modeler had to create sheet instances. This involved determining the number of sheets, the particular sheet types to use, and passing the desired
parameters to the sheets. This is a relatively simple procedure when the model consists of just a few sheets, but becomes very complex for a model covering many input
4.2. Submodels
37
dimensions, as the number of sheets increases quickly. Typically this has been done
with nested loops - once dimensions could be enabled/disabled with parameters, the
increased complexity necessitated the addition of many conditional statements.
The created sheets were connected in the fourth section. Again, this required a
complex set of operations containing various nested loops and conditional statements
in more complex models. The parameters for the connection had to be passed to each
connection statement, which resulted in duplicated code even within a model file. For
example, a spatial frequency sheet was connected to the V1 sheet with exactly the same
parameters as any other LGN sheet, the only difference being the size.
The fifth and final section involved setting up the measurement process, and was
usually rather short. This, however, differed between the model files, as models covering more dimensions also have a more complex measurement setup.
4.2.2
Using a hierarchy of submodels
To avoid code duplication across models as described previously, the concept of submodels is introduced. The most general submodel, Model, provides a structure which
has to be fulfilled by all subclasses, as well as a set of helper functions. These loosely
correspond to the sections of the old model files as described in 4.2.1. Subclasses of
Model then gradually become more specific through the implementation of more and
more methods and the addition of more parameters. For example, in VisualInputModel, parameters shared by models that receive visual input are added. This includes
the input contrast and the area modeled by the cortex, amongst many others. Also, this
class calls the pattern coordinator for input pattern generation.
Starting with an early vision model, the concept of levels is used. A level is a set of
sheets in which the sheets within a level share most parameters and match conditions
which are described later. In practice, the early vision model consists of two levels:
Retina consisting of one or two retina sheets, and LGN containing at least two sheets,
LGN On and LGN Off, but likely containing more sheets in complex models.
Rather than using nested loops, a product is used to specify the number of sheets.
This might look as follows:
’Retina’:args[’eyes’],
’LGN’: args[’eyes’] ∗ args[’polarities’] ∗ args[’SFs’]
The first line creates a level “Retina”, containing as many sheets as the list “args[’eyes’]”
contains entries, and labeled with the entries of this list. The second line creates the
38
Chapter 4. Architecture
“LGN” level. In the simplest case, where “args[’eyes’]” and “args[’SFs’]” are lists
with just one entry and “args[’polarities’]” is a list with the entries “On” and “Off”,
this statement creates only two sheets. However, if “args[’eyes’]” contains the entries
“Left” and “Right”, “args[’polarities’]” is a list as before, and “args[’SFs’]” contains
the entries “1” and “2”, eight sheets are created.
This is a huge improvement over using nested loops, which could sometimes reach
up to 5 levels deep. For each of the levels, one method specifying the parameters of the
level has to be implemented. Internally, this method can slightly adapt the parameters
depending on the properties of the actual sheet. This avoids duplicating code. Here,
the most general version of the Retina and LGN levels has been implemented. By
setting the dimensions parameter of the early vision model accordingly, a very general
version with over 20 sheets in total (see section 6.9), or a subset of this model with the
basic GCAL model as the simplest model (see section 3.3.2) with just one sheet on the
Retina level and two sheets on the LGN level, can be created using the same class.
The early vision model can be used by any model of the cortex. In this thesis,
GCAL has been set up on top of the early vision model. However, the concept is general, and any other visual cortex model could also use the EarlyVisionModel. For
GCAL, another level called V1, which consists only of one sheet with the same name,
is introduced. Because the early vision model is used, code duplication across model
files is avoided. Import declarations, training patterns and sheet instantiation are now
taking place within one specific class shared across all models rather than being performed individually per model file. The following section shows how creating connections between sheets can be considerably simplified.
4.2.3
Automatically wiring up sheets
Traditionally, connections between sheets were explicitly stated using a connect command with the source sheet, the destination sheet, and the projection parameters as
arguments. This again was usually done with nested loops. Using this machinery,
it was hard to understand which sheets got connected, and extending this procedure
to more sheets was fault prone. Here, match conditions set per level are proposed to
specify the connections.
Before describing the match conditions, another concept of sheet properties needs
to be introduced. This is a generalized version of a sheet name. A typical sheet name
is LeftLGNOn, whereas Left refers to an eye, LGN refers to the sheet level and On
4.2. Submodels
39
refers to the polarity. A sheet property allows each of those parts to be set and accessed
individually.
Match conditions are defined per level. Each match condition consists of a set
of criteria which must be fulfilled by an incoming sheet. As a simple example, V1
connects to all LGN sheets. Therefore, the only criteria is:
{’level’:’LGN’}
To specify the match conditions, the properties of the sheet for which the match condition is specified can be used, e.g. connecting LGN sheets with a property eye to retina
sheets of the same eye is implemented as follows:
{’level’: ’Retina’, ’eye’: properties[’eye’]}
There, properties[’eye’] refers to the eye of the LGN sheet. This can easily be extended
to also work in the case that only one eye is used, and therefore properties[’eye’] does
not exist. Furthermore, it is possible to specify more than one match condition. This
allows very specific connections, as well as connecting to different levels, e.g. there is
usually one match condition for afferent connections and another match condition for
lateral connections.
Within the Model class, a method that automatically checks whether a match condition holds and connects sheets has been implemented. For each pair of sheets, there
is a test whether the source sheet fulfills all criteria in one of the match conditions of
the destination sheet. If so, a connection between the two sheets is created. If none,
or just a subset of the criteria are fulfilled, no connection is established. Because this
method is implemented in a general manner, rather than explicitly connect sheets, all a
modeler need do is create match conditions.
There is one method per match condition to specify the parameters of the projection
in the case of a match. To adapt the parameters to the specific connection, the properties
of the source as well as the destination sheet are passed to these methods.
4.2.4
Deferred model instantiation
By introducing specification classes for sheets and projections, which act as templates
for actual sheet and projection instances, it is possible to investigate the network structure as well as the parameters of the sheets and projections, before instantiation. This
is desirable when e.g. running many simulations in a batch mode with varying network
structure. This is useful in order to be able to record the responses of all sheets, as the
40
Chapter 4. Architecture
names of the sheets have to be known before they get instantiated. This only becomes
feasible using specification classes.
Even if the network structure across various simulations stays constant, one might
want to change a specific parameter of a projection. Again, previously this was not
possible, and only became feasible by introducing the specification classes. A resolve
method allows accessing the actual sheet/projection after the specification object has
been instantiated.
Models are now classes which can be instantiated. To instantiate a model, the
model object is called. This internally calls all the specification classes which automatically instantiate actual sheets and projections between them.
4.2.5
Summary submodels
The introduction of submodels has greatly improved the work-flow of a modeler using
Topographica. Modelers now have access to an early vision model and can build their
model of the primary vision model on top of it. Alternatively, the GCAL model has
been implemented and can be modified. The code duplication will be cut down to a
minimum once all models have been changed to use the new system. Comparing models is now much easier than before, as the model files no longer need to be compared
as a whole. Using the class-based approach, instead, a subclass should explicitly list
all the modifications to the base class.
The machinery is set up in such a way that various cortex models can be used on
top of the same retina and LGN sheets. Also, one can imagine that the set of LGN
sheets is replaced by a single sheet with neurons which are randomly generated by
choosing a certain number of units in the center, along with a non-specific surround
(see Kneisel (2013)). Such a model could build upon the visual input model, replace
the early vision model, and ModelGCAL could inherit from the new model, but would
not need to be changed in other ways.
The implementation of submodels is currently based on inheritance. That is, a
cortex model is inherited from the early vision model, and extends its functionality by
adding a cortex level. In theory, this also allows the addition of higher visual areas on
top of V1, by inheriting from the submodel that includes V1.
A limitation of the inheritance-based approach is that multiple models, all inheriting from the same submodel, cannot currently be combined. Imagine a model which
adds V2 on top of V1, and another model which adds the visual area MT on top of
4.3. Motion model
41
V1. These models are currently incompatible, and therefore cannot be combined. This
could be circumvented by connecting submodels not via inheritance but, rather, in the
actual model file as components. This would require substantial changes, as attributes
would not be shared between the classes anymore. Instead, they would need to be
communicated across the components.
The match conditions are of great importance for models covering many input dimensions, and hence a large number of sheets with complex wiring. These allow the
properties of sheets to be specified such that each sheet allows incoming connections
from other sheets. This not only simplifies the wiring up of the sheets, but also allows
a single set of parameters associated with a match condition, rather than having the
parameters spread over the model file.
Because of the helper functions introduced in the Model class, the modeler’s main
focus is shifted to deciding which sheets the model should include, which parameters
these sheets should have, and which parameters the projection connecting the sheets
should have. Previously, all those decisions still had to be made, but they were mixed
with code. The submodels machinery allows defining parameters more explicitly, as
parameters are now class attributes.
4.3
Motion model
Neurons only become selective for motion if temporal delays are introduced to the
model. These delays correspond to the lagged cells found in cat LGN (see section
2.2.6). There are various ways to implement this in a model.
4.3.1
Previous proposals
In Topographica, a motion concept based on lagged retina sheets has been implemented
(Gerasymova, 2009). For each retina sheet, the input is swept further. For each retina,
there is one LGN On sheet and one LGN Off sheet. For example, if one wants to model
four motion lags, four retina sheets and eight LGN sheets are needed.
In the paper from Bednar and Miikkulainen (2006), it is shown how lagged retina
sheets can be avoided. There are only two retina sheets (modeling the left and right
eye), however they change their pattern over time. At time zero, the first LGN sheet
with the highest lag computes its activation. At each further time step, the input pattern
on the retina sheets is swept in a certain direction, and the activation of subsequent
42
Chapter 4. Architecture
LGN sheets with lower delay is computed. Once all LGN sheets have been activated,
the responses are propagated to the V1 sheet. This is much more realistic than having
multiple retina sheets representing motion.
(a) Model with two retina sheets, one for the
(b) Model with several lagged retina sheets,
left eye and one for the right eye. Temporal
which introduce temporal delays that are
delays are added at the LGN level. Reprinted
propagated to corresponding LGN On and
from Bednar and Miikkulainen (2006).
Off sheets.
Reprinted from Gerasymova
(2009).
Figure 4.1: Previous proposals to model motion selectivity.
4.3.2
New approach: Multiple projections from LGN sheets to V1
The idea from Bednar and Miikkulainen (2006) has been taken further for this thesis.
Rather than modeling multiple LGN sheets representing lagged cells, just one LGN On
and one LGN Off sheet is contained in the model. Each sheet has multiple projections
to V1, and each projection has a different delay. That means that the activation in V1
is gradually built up over time. This concept had first been proposed in Bednar (2012),
but was not yet implemented.
Although a prototype for this new representation of temporal delays existed previously, it had severe issues. As described in sections 4.1.1 and 4.1.2, there are several
4.4. Discussion
43
advantages to sequentially applying feature coordinators in order to generate input patterns. This was not possible with the prototype, as all parameters needed to be set on
the class handling motion. It was not possible to pass an input pattern to this class, and
get a moved pattern returned.
In this thesis, the prototype has been improved to work properly with any kind
of input patterns. Usually, the pattern is swept orthogonally to its orientation, but in
theory any motion direction can be applied on arbitrary input patterns. This is done by
generating a new input pattern on the supplied pattern generator only every n-th time
step, rather than for each time step. At the first time step, the input pattern is returned
as is. At the second time step, it is swept aside in the desired direction, and so on.
This implementation has the advantage that the model structure does not need to
be changed in order to represent temporal delays. It looks exactly like the basic GCAL
model described in 3.3.2; however, it has been extended with multiple projections from
LGN sheets to V1, which allow modeling motion. In section 6.5, it is shown that this
representation of temporal delays results in qualitatively similar results compared to
the previous proposals.
4.4
Discussion
This section critically analyzes the feature coordinators, the pattern coordinator, and
the class-based submodels system introduced in this chapter. Strengths and limitations
are highlighted, and suggestions for improvements and extensions are given.
4.4.1
Feature coordinators
Feature coordinators are a very general concept. A feature coordinator is supplied an
input pattern and expected to modify this pattern in a certain way, returning a new
pattern based on what was supplied. This concept is very powerful, and has proven to
successfully synthesize the following dimensions: position, orientation, direction, spatial frequency, dimming and disparity. A challenge for the future will be synthesizing
color for mathematically defined inputs such as Gaussians - this is challenging due to
the complex nature of the task, not because a feature coordinator is too general or too
limited in its capabilities (see section 7.2.4).
From an implementation point of view, it is challenging to transfer this concept to
measure maps. This is the inverse problem to the generation of training input patterns.
44
Chapter 4. Architecture
As part of Topographica, the feature mapper concept exists; its job is to coordinate
the presentation of patterns and measure of the responses. Within feature mapper, a
similar hierarchy of methods exists which creates patterns that vary in a certain way.
It is desirable that feature coordinators are used within feature mapper in the future,
although this would require substantial work. Rather than randomly varying feature
dimensions for training inputs, the dimensions need to be varied in a deterministic way
to measure responses.
In summary, feature coordinators have improved the input pattern generation considerably. A clear, extensible hierarchy of feature coordinators evolved from an ad-hoc
way of defining input patterns with a lot of random number generators bundled together. Generalizing this concept even further to also measure maps is future work.
4.4.2
Pattern coordinator
The pattern coordinator class provides a convenient interface to the feature coordinators described above. Furthermore, it is designed to work with artificial stimuli such
as Gaussians as well as images to be read from a folder. This allows modelers to use
predefined input patterns rather than having to define patterns themselves. They can
choose from a wide range of dimensions that the pattern should have. Furthermore,
changing from artificial stimuli to natural image inputs is now straightforward, as all
that needs to be changed is using the subclass PatternCoordinatorImages rather than
the superclass PatternCoordinator directly. The parameters can be kept the same,
except that a folder for the image dataset needs to be supplied.
This is superior to the previous definition of input patterns, where specifying the
dimensions to be covered had to be done with conditional statements. Also, the input patterns often varied between models even if the same dimensions were covered,
because the seeds for the random number generators were set differently. The pattern
coordinator provides a standardized interface, and random streams are guaranteed to
be the same even if used in different models.
One drawback is that only the individual patterns, but not the composite input
pattern generated of the individual patterns, can be modified, e.g. it is not possible to
sweep the whole pattern in a certain direction, but only the individual patterns. This
could be addressed in future extensions.
4.5. Architectural summary
4.4.3
45
Submodels
The class-based modeling approach using submodels is one of the main contributions
of this thesis. Here, the strengths and limitations of this new machinery are discussed.
One of the main advantages is that model files are now just instantiating a class
rather than defining the whole model. There is a hierarchy of classes, and a modeler can
choose to use only the very basic Model class, for example in the case a model of the
auditory cortex is to be created. At the other extreme, a modeler can use ModelGCAL
to model the primary visual cortex, and only modify a certain method in a subclass.
Alternatively, a modeler can choose to build up on any level of the hierarchy in between
these extremes. Whatever decision is made, the submodels can be easily reused.
The Model class provides a set of helper functions which simplify the workflow
considerably. It is much easier, for example, to define how many sheets and projections
a model should have. The projections between sheets can be easily set up using simple
rules called match conditions, which avoids using nested loops. Also, previously a
subset of dimensions within a model was made possible with conditional statements;
this is now mostly needless, as the helper functions skip parameters which are not set
because the dimension they belong to is not modeled.
The biggest limitation of this approach is that it is mostly restricted to feed-forward
models. Each level in the hierarchy of classes adds more sheets which are to be connected to sheets of lower levels. Therefore, the higher levels in the hierarchy have to
know which sheets in the lower levels exist, and how to connect to them. It would be
desirable that, rather than having a hierarchy of classes, one would have components
which are interchangeable.
This component-based approach would be a major extension to the current implementation. One of the biggest issues is that attributes are currently shared across the
different levels, and would need to be communicated appropriately across the levels
instead. In addition, it is not clear how feedback connections could be specified.
4.5
Architectural summary
This chapter introduced a set of tools which are necessary in order to build an all maps
model. The input pattern generation was modularized, and the addition of dimensions
was simplified. Each feature coordinator synthesizes exactly one dimension, and applying them sequentially on a template pattern results in input patterns that cover all
46
Chapter 4. Architecture
dimensions modeled in this thesis.
The class-based submodels system is superior to the previous way of defining models. For a modeler, it is more obvious how sheets and projections between sheets are
created. The code duplication within one file and across files was cut to a minimum.
Submodels can be reused and/or modified depending on the requirement. This makes
differences between related models much more visible than before. It is expected that
new models in Topographica will consistently use this new system.
Multiple projections with increasing delays from LGN sheets to V1 is a novel way
of modeling motion. To the author’s knowledge, it is the first time that this has been
addressed in a publication, although originally proposed in Bednar (2012). The prototype has been extended considerably, and biologically realistic direction maps are
resulting, as shown in 6.5.
In summary, a set of tools necessary to model an all maps model of the primary visual cortex has been developed. Furthermore, a new way of modeling motion has been
presented. It is expected that the pattern coordinator using the feature coordinators and
the submodels system will be used by the majority of Topographica users in the future.
Chapter 5
Methods
Starting with the basic GCAL model, which was shown to result in biologically realistic orientation maps in section 3.3.2, this chapter demonstrates how this model can be
extended to model all other known cortical maps. First, it is shown which extensions
are needed to model the other cortical maps individually. This includes the changes
in the model structure, as well as the modifications of the input patterns using feature
coordinators. For each model, a graphical representation of the model structure as well
as sample input patterns are printed. Note that all input patterns are created using the
pattern coordinator, which itself makes use of the various feature coordinators (see
section 4.1).
As a sample of how individual models can be combined, a model for color preference and ocular dominance is presented. This example has been chosen because this
combination of dimensions was known not to work in Gerasymova (2009). Therefore,
in the corresponding section, the required changes are highlighted.
A combination of the various individual models, resulting in a combined model, is
described at the end of this chapter. This model covers the orientation, ocular dominance, disparity, direction, spatial frequency and color dimensions simultaneously.
Although the complexity of this model is still very high, the model is much simpler
compared to the work in Gerasymova (2009).
5.1
Orientation preference
To model orientation preference, the basic GCAL model as described in section 3.3.2
is used as is. Figure 5.2 shows the Gaussian input patterns which are used. The orientation of the Gaussians are distributed uniformly random between 0 and π. Alternatively,
47
48
Chapter 5. Methods
natural images can be used (not shown here, see sections 5.6 and 5.7 for reference).
The structure of this model is very simple. The retina sheet outputs its activity to
the LGN sheets, which perform a Difference of Gaussian operation as well as gaincontrol, which enables the model to work for a wide range of input contrasts. The V1
sheet is connected to both LGN sheets. Furthermore, short-range lateral excitatory and
long-range lateral inhibitory connections between neurons in V1 exist. The afferent
connections from the LGN sheets, as well as the inhibitory connections, are adapting
using the Hebbian learning rule.
Figure 5.1: Architecture of a GCAL model with neurons selective for orientation. A
Gaussian input pattern is shown on the retina sheet. Blue cones from the LGN sheets
to the retina sheet visualize the receptive field of a single LGN unit. Yellow circles at
the LGN level represent the lateral connections within a LGN sheet due to gain control.
The activity at the LGN level is shown as well. There, one can see that units on the
LGN On sheet are active in regions where the center of the receptive field is brighter
than the surround of the receptive field. For the LGN Off sheet, units are active in
regions where the surround of the receptive field is brighter than the center. Again,
blue circles visualize the receptive fields from V1 to the LGN sheets. Two yellow circles
on the V1 sheet represent the excitatory lateral connection (smaller circle) and the
inhibitory lateral connection (bigger circle). Whiteish areas on the V1 sheet indicate a
slight activation of V1.
5.2. Ocular preference
49
Figure 5.2: Oriented Gaussian input pattern for the basic GCAL model.
5.2
Ocular preference
As ocular dominance expresses the preference for one eye over another eye, a second
retina sheet representing a second eye needs to be added for ocular preference simulations. Therefore, the simulation contains two retina sheets representing the left and
right eye. For each retina sheet, there is one LGN On and one LGN Off sheet. As
before, all LGN sheets connect to V1.
In GCAL (and its predecessor LISSOM), biologically realistic ocular dominance
maps only emerge due to brightness differences in the input. The fraction by which the
pattern brightness varies between the two eyes is set to ε = 0.7. The brightnesses βle f t
and βright of the left and right eyes are then calculated as follows, where ξ is a random
number between 0 and 2 (see a sample pair of input patterns in figure 5.4):
βle f t = (1 − ε) + ε · (2.0 − ξ)
βright = (1 − ε) + ε · ξ
In comparison to previous simulations using LISSOM, additional connections between the LGN sheets of the two eyes are required. This is due to the gain control at
the LGN level. To recall, gain control allows using a wide variety of input contrasts, by
dividing each units activity by the sum of the activity of surrounding units. Therefore,
a brightness difference is eliminated by gain control, as the ratio of numerator and denominator in equation 3.5 is approximately constant for different brightnesses (as long
as the sum of activations is sufficiently bigger than k).
To circumvent this behavior, lateral connections between the two LGN On sheets
as well as between the two LGN Off sheets are introduced. Then, the denominator in
50
Chapter 5. Methods
equation 3.5 is the same for the units at position j of both sheets (in contrast to adding
up the activations of just one sheet, which results in different denominators each sheet),
but the activation Ψi (t) of the retina sheet is higher for either the left or the right eye,
and therefore the activation η j,O differs between the LGN sheets.
Figure 5.3: Architecture of a GCAL model with neurons selective for orientation and
ocular dominance. Compared to the orientation-only model, a second retina sheet with
corresponding LGN sheets is introduced. The blue lines across the LGN sheets indicate
lateral connections due to gain control of sheets with the same polarity. Please accept
apologies for the small font in this and some of the following figures showing model
architectures.
Figure 5.4: Gaussian input for a GCAL model with neurons selective for orientation and
ocular dominance. One can clearly see the brightness differences of the input patterns.
In this example, the right pattern is much brighter than the left pattern.
5.3. Disparity preference
5.3
51
Disparity preference
For modeling disparity preference, the same model as for the ocular preference simulation is used, but the input differs. Rather than using brightness differences between
the two retina sheets, in the disparity simulation the pattern location is slightly offset
between the eyes, as shown in figure 5.5. The position of the patterns is calculated as
follows, whereas ξ is a uniformly distributed number between 0 and ξmax = 0.08333,
and x is also uniformly distributed between 0 and 0.75 − ξmax :
xle f t = x + ξ
xright = x − ξ
Here, it has to be stressed that ocular preference and disparity are two separate
dimensions, although modeled in the same way. A neuron in V1 can prefer one eye
over the other, while keeping the activity level constant regardless of the input pattern
disparity. On the other hand, another neuron might be highly selective for disparity,
only reacting to input patterns with a specific offset, while being selective to input from
both eyes.
Figure 5.5: Oriented Gaussian input pattern with position offset. In this example, the
bottom pattern is clearly offset to the right in the right retina (hitting the x-axis at ≈ -0.35
in the left retina, and at ≈ -0.2 in the right retina). The pattern at the top is slightly offset
to the left in the right retina.
52
Chapter 5. Methods
5.4
Ocular and disparity preference
When modeling ocular dominance and disparity simultaneously, the input patterns of
the two eyes have to vary in brightness as well as their position offset. This undertaking is straightforward using the pattern coordinator. The model structure itself is not
altered, compared to the individual ocular dominance/disparity simulations.
This simulation is important, as earlier studies have shown that disparity by itself cannot explain biologically realistic ocular dominance maps (Miikkulainen et al.,
2005), and it is clear that a disparity map can only emerge if there is an offset between
the pattern locations of the two eyes. Therefore, only if the input pattern show both,
brightness differences and position offsets, ocular dominance maps and disparity maps
become apparent. Figure 5.6 shows a pair of sample inputs where both features are
visible.
Figure 5.6: Oriented Gaussian input pattern with position offset and brightness offset.
The same inputs as in figure 5.5 are shown, but now the pattern on the right retina is
slightly brighter than the pattern on the left retina.
5.5
Direction preference
A new motion model was introduced in section 4.3.2. The model structure compared
to the basic GCAL model consists of the same sheets (a figure of the model structure is
therefore omitted), however multiple delayed projections (here: n = 4) from the LGN
sheets to V1 are introduced. To account for these additional projections, the learning
5.5. Direction preference
53
rate from neurons in V1 is divided by the number of projections. Furthermore, the
strength for these projections is increased by a factor of 1.5 to push the activity level
of neurons in V1 closer to their desired average activity.
The main contribution in this thesis is the introduction of a feature coordinator
for motion, which moves the input pattern orthogonally to its orientation in the case
of Gaussian patterns, where the orientation ranges between 0 and 2π (in contrast to
0 and π which would only allow upwards/leftwards motion rather than motion in all
directions). For natural images, the direction is chosen randomly between 0 and 2π as
it is hard to determine the orientation of a natural image pattern. At each time step, the
pattern is swept by 3.0/24.0 units.
After n time steps, a new pattern is propagated from the retina sheets to V1. A
sample series of Gaussian patterns for time t = 0 until time t = n (with sweeping of
one pattern from time t = 0 until time t = n − 1 and a subsequent onset of a new pattern
at time t = n) with n = 4 is shown in figure 5.7.
Visual inspection has raised the issue that the connection fields of neurons show
unusual behavior at the edges, if run with standard parameters. That is, especially for
the projections which are activated at t = 0 and t = n − 1, neurons at the LGN layer
which are at the very edge of the connection field of neurons in V1 show an unusually
high weight. To circumvent this behavior, the position boundaries of the Gaussian
input patterns are increased. Therefore, the patterns can be “tracked” over time (as in,
they are seen by neurons in V1 from time t = 0 until time t = n − 1). As a rule of
thumb, the boundaries are increased by n − 1 times the amount of the pattern is swept
per time step.
Figure 5.7: Oriented Gaussian input pattern moving over time. The leftmost pattern
shows the input at t = 0. Then, at t = 1, the pattern is moved orthogonally to its
orientation slightly further to the top-right. This sweeping continues until t = n − 1. At
t = n = 4, a new pattern with changed orientation is onset. This pattern again is swept
for n time steps, before another pattern serves as an input model input (not shown
here).
54
Chapter 5. Methods
5.6
Spatial frequency preference
Following the proposal in Palmer (2009), multiple LGN sheets selective for different
spatial frequencies in the input are extended to model spatial frequency. Here, there
are υ = 3 different spatial frequency channels with different sizes of receptive fields in
the photoreceptor sheet. The receptive fields for successive spatial frequency channels
increase by a factor of Γ = 2.5. Both, υ and Γ are represented as variables in the source
code and can easily be changed. However, more than υ = 4 spatial frequency channels
are computationally not feasible.
Similarly to the ocularity simulation, additional lateral connections between the
spatial frequencies are added. This allows the different spatial frequency channels to
“compete” with each other. A more detailed investigation of this principle would be
desirable, but is left for future work.
Figure 5.8 shows the extended model, which also displays the different activity
values of the spatial frequency channels depending on the present frequencies in the
Figure 5.8: Architecture of a GCAL model with neurons selective for orientation and
spatial frequency. Compared to the orientation-only model, a second and third spatial
frequency channel with each one LGN On and one LGN Off sheet is introduced. Blue
cones between the spatial frequency channels show connections due to gain control.
The size of these connections has to be investigated further, as discussed in section
7.2.
5.7. Color preference
55
input image.
As input patterns, (gray-scale) natural image patches from the McGill dataset (Olmos and Kingdom, 2004) shown in figure 5.10 are used. This has the advantage over
Gaussian input patterns in that different spatial frequencies are inherent to natural images, whereas they would need to be synthesized for Gaussian patterns. This is still
work in progress, see section 7.2.4 for further discussion.
5.7
Color preference
In comparison to Bednar et al. (2005), a new color model by Ball (2014) (improved
and updated to work with the most recent version of Topographica by Spigler (2014))
is used. Separate retina sheets for each color are replaced by a single retina sheet, with
the possibility to access different color channels. This further reduces the number of
retina sheets, as now just like in biology just one sheet per eye is needed. Each color
channel within the retina can be seen as one type of cone cells.
Following the opponent-process theory (Hurvich and Jameson, 1957), four pairs of
sheets at the LGN level modeling the following opponent channels are present: redgreen, green-red, blue-yellow and black-white (also known as luminance). For the
red-green pair, the center of the receptive field is connected to the red channel and
the surround is connected to the green channel. For the green-red pair, the center and
surround are inter-converted. The blue-yellow pair is a special case, as it is modeled
spatially co-extensive as proposed in Dacey (2000). Therefore, the receptive fields in
the center from the blue channel and the surround which is connected to the red and
green channels are equally wide. The luminosity pair receives input from all color
channels, in the center as well as the surround. The LGN On sheets receive excitation
in the center and inhibition in the surround and vice versa for the LGN Off sheets. A
visualization can be found in figure 5.11.
The model was built in a way that also a dichromatic simulation is feasible, however this is not shown here. In contrast to the ocular dominance and spatial frequency simulations, gain control is not used for color selective channels (red-green,
green-red and blue-yellow) due to the lack of gain control in the color sensitive parvo
cells (Solomon and Lennie, 2005; Pitkow and Meister, 2012). Therefore, gain control
is only used for the luminosity sheets.
As for the spatial frequency simulation, natural images from the McGill dataset
are used as input patterns (see figure 5.10). The ratio between strengths of LGN color
56
Chapter 5. Methods
versus luminosity channel connections to V1 has been chosen as 0.1, i.e. the strength of
the connections from luminosity sheets to V1 is much higher compared to the strength
of color connections.
Figure 5.9: Architecture of a GCAL model with neurons selective for orientation and
color. Compared to the orientation-only model, color-selective LGN sheets are introduced. Here, “RedGreenBlue” stands for luminosity, as the luminosity channel gets
input from all three cone types, here modeled within a single retina. “RedGreen” sheets
are wired internally to get their center input from the red cones, and surround input
from the green cones. For the “GreenRed” sheets, this is interchanged. The “BlueRedGreen” sheets get their center input from the blue cones, and their surround input from
both, red and green cones. These sheets are modeled spatially co-extensive, i.e. the
receptive fields of center and surround are of equal size. Please accept apologies that
the pattern on the retina sheet is drawn in gray-scale rather than color.
5.8
Color and ocular preference
In comparison to the color preference simulation above, a second eye with exactly
the same setup as the first eye is introduced. This then also requires four more pairs of
5.8. Color and ocular preference
57
Figure 5.10: Example natural image input pattern
Figure 5.11: Visualization of receptive fields in color simulations. Here, Long (L) stands
for the red cone type, Medium (M) for the green cone type and Short (S) for the blue
cone type. Long/Medium/Short are labels according to the wavelengths the cones are
responsive to. Figure reprinted from Paula (2007).
opponent channels at the LGN level for the second eye. Otherwise, the model structure
is the same, as can be seen by comparing figures 5.9 and 5.12.
In comparison to the previous all maps model (see 3.3.3), the input patterns between the eyes actually differ in their brightness/value in the HSV color space rather
than subtracting the same constant from the R, G, B values which results in a changed
58
Chapter 5. Methods
hue value.
The implementation is as follows: each pixel i is read from the image file, resulting
in the RGB values ri , gi , bi . Then, these values are converted into the HSV color space,
resulting in values hi , si and vi . As for the pure ocular dominance simulation, a variable
ε = 0.7 is introduced describing the brightness difference between the eyes. Here, the
random variable ξ takes values between (−1 + ε)/2.0 and (1 − ε)/2.0. Then, the HSV
values for the left and right eye are calculated as follows:
hi,le f t = hi,right = hi
si,le f t = si,right = si
vi,le f t = vi + ξ
vi,right = vi − ξ
Converting these HSV values back to RGB leads to image pairs where one of the
patterns has a higher brightness than the other, while still having the same hue for each
pixel. Note that in some cases a cropping is necessary, where the values vi,le f t and
vi,right above 1.0 are cropped to 1.0. A sample image pair is shown in figure 5.13.
Figure 5.12: Architecture of a GCAL model with neurons selective for orientation, ocular dominance and color. Compared to the color model, a second retina sheet and
corresponding LGN sheets are introduced. Furthermore, lateral connections between
the luminosity sheets are added.
5.9
Combined model
Here, it is shown how the individual models presented above are combined to build a
unified model with neurons selective for the following feature dimensions: positional
5.9. Combined model
59
Figure 5.13: Example of natural image patterns in the case of a two-retina simulation.
There, one can see clear brightness differences between the left and right input images.
However, the corresponding hue values in the two images are the same.
preference, orientation, eye of origin, phase disparity, direction, color and spatial frequency. In order to build a unified model, the concepts of all individual models have to
be combined. Furthermore, the input patterns which are presented to the model have
to cover all input dimensions so that feature preferences of neurons in V1 emerge.
The basic GCAL model with one retina sheet, one pair of sheets at the LGN level
and one sheet representing V1 is extended as follows: To model color, the one pair of
LGN On/Off sheets is replaced by four opponent channels as described in section 5.7.
Extending this model to also include spatial frequency is possible by introducing υ −
1 = 2 spatial frequency sheets, as the first spatial frequency channel is implied by the
luminosity sheets. As the input, colored natural images are used, which do not need
any adjustments at this stage as color and spatial frequency are both inherent.
By mirroring this pathway, i.e. introducing a second retina sheet and building
the same structure of LGN sheets for this sheet, the ocular dominance and disparity
dimensions are covered. Unfortunately, there is no color calibrated stereo dataset, and
therefore disparity has to be synthesized as described in section 5.3. Also, brightness
differences are introduced (see section 5.2).
Introducing temporal delays from every single LGN sheet to V1 results in a preference for motion. As in section 5.5, n = 4 projections per sheet with increasing delays
are used. The motion of the image patches is synthesized.
Figure 5.14 is visualizing the architecture of the all maps model. In total, there are
60
Chapter 5. Methods
27 sheets, two of them on the retina level, 24 LGN sheets and the V1 sheet. These
are connected by in total 158 projections, thereof 60 from the retina sheets to the LGN
sheets (including one projections per cone per color selective sheet), 72 gain control
connections at the LGN level, 26 connections from the LGN sheets to V1, as well as
the two lateral projections within V1. The input for the combined model for both retina
sheets at different times is shown in figure 5.15.
5.10
Summary
Starting with the basic GCAL model, this chapter first introduced the required changes
to this model to cover the other feature dimensions individually. Changes made are the
extension of the model by more sheets, the extension by more projections, as well as
the alteration of the input patterns to cover the required features, and in most of the
cases, a combination of these.
Then, the ocular dominance and color model have been merged to show the combination of two previously separate models. In this particular case, the four opponent
channels were duplicated, whereas the duplication is wired to the second retina sheet
introduced by the ocularity model. One could also think of it the other way around.
Starting with the ocularity model, the previously two pairs of LGN sheets were replaced by four opponent channels. This clarifies that there is no “order” of dimensions,
and any subset of dimensions can be modeled.
At the end of the chapter, a unified model resulting in selectivity for all known spatial dimensions in the primary visual cortex was presented. This is still a very complex
model, however following the proposals in Bednar (2012) is much more comprehensible than the previous attempt to build an all maps model in Gerasymova (2009).
In the next chapter, the resulting maps of these models are shown and discussed.
single LGN sheet to V1 model selectiveness for motion.
input let neurons in V1 become selective for a range of spatial frequencies. Temporal delays introduced by multiple projections from every
sensitive LGN sheets allow the development of a hue map. Furthermore, LGN channels which are responsive to different frequencies in the
quency and color. Separate pathways for the left and right eye allow neurons to become selective for ocularity as well as disparity. Color
Figure 5.14: Architecture of a unified GCAL model with neurons selective for orientation, ocular dominance, disparity, direction, spatial fre-
5.10. Summary
61
62
Chapter 5. Methods
Figure 5.15: Example natural image patterns for the combined model. The brightness
of the pattern varies between the eyes. Furthermore, in this example the pattern is
slightly offset to the right in the right retina. Also, the pattern is swept over time, here in
south-east direction.
Chapter 6
Results
In the previous chapter, a variety of models accounting for different cortical maps were
introduced. Here, the resulting maps are investigated, and for the models combining
feature preferences the interplay between the maps is discussed. They are also compared to the maps found in animals, as reviewed in chapter 2.
For each model, the orientation map after 20000 training iterations is shown, including an indication of pinwheels which were found. Furthermore, the Fourier power
spectrum is shown, which visualizes how frequently orientation patches repeat. Biological maps usually have ring-shaped Fourier spectra (Blasdel, 1992a,b). The integral
of the power spectrum over the radius is shown in the bottom-right corner of these
plots. A red line indicates the estimated radius of the isotropic ring (Stevens et al.,
2013).
The maps are measured by presenting sine gratings with varying features to the
retina. For example, to measure orientation, sine gratings with varying orientation,
phase and position are used. The phase and position parameters have to be varied so
that at least one appropriate pattern has been presented for each neuron. The orientation preference is then calculated by forming a vector for each measured orientation,
whereas the vector angle corresponds to the measured orientation and the vector length
corresponds to the highest activity of this neuron for this orientation. Then, the sum of
these vectors is calculated, which again results in a vector. The angle of this vector is
the resulting orientation preference.
Furthermore, the length of the resulting vector corresponds to the selectivity of
neurons, which reveals the ratio of the responses to the preferred vs non-preferred orientation. A highly selective neuron responds much stronger to the preferred orientation
than to others. For weakly selective neurons, the difference of the activity values for
63
64
Chapter 6. Results
preferred vs non-preferred orientations is smaller.
Here, a series of separate maps is measured. For example, the direction preference
is measured independently of the color preference, and so forth. In case of all but the
phase disparity map, the corresponding feature as well as the orientation of the sine
grating is varied. For the phase disparity map, the orientation of the sine grating is
vertical to measure horizontal disparity. It would be desirable to measure maps as a
cross product of all features, however this would be very expensive in terms of the time
needed.
6.1
Orientation preference
In this section, the resulting orientation map of the basic GCAL model is briefly discussed. For the interested reader, an extensive evaluation of this model can be found
in Stevens et al. (2013).
The orientation preference of the orientation map in figure 6.1 varies smoothly
across the cortex. As in animals, typical characteristics such as pinwheels, saddles and
fractures can be observed. The results are qualitatively the same as in the published
GCAL model (Stevens et al., 2013), and an exact replicate can be created if desired
(not shown here).
(a) Orientation preference map with overlaid pin-
(b) Fourier power spectrum of the
wheels. The histogram to the right shows how the ori-
orientation map, which is ring-
entation preference is distributed, here all orientations
shaped and therefore indicating a
are represented nearly uniformly.
high quality map.
Figure 6.1: Orientation map for the basic GCAL model
6.2. Ocular preference
6.2
65
Ocular preference
Introducing a second retina and presenting patterns which vary in brightness between
the retina results in ocularity maps as shown in figures 6.2 and 6.3. The orientation
map is slightly altered, but still of a high quality comparable to those of animals.
The majority of neurons are selective for one eye or the other, and there are only
relatively few binocular neurons. As in animals, most neurons lie in the center of
ocular dominance stripes. Some pinwheel neurons are duplicated, i.e. there are several
neurons with low orientation selectivity, surrounded by other neurons of all different
orientation preferences, very close to each other. These duplications occur almost
always near ocular dominance boundaries, which are featured by a low selectivity
for ocularity. Therefore, these neurons have a low selectivity for both: orientation and
ocular dominance. It would be interesting to investigate the properties of these neurons
further.
(a) Orientation preference map with overlaid pinwheels
(b) Fourier power spectrum of the
and contours visualizing the ocular dominance bound-
orientation map. The spectrum is
aries. The ocular dominance boundaries tend to cross
still ring-shaped, however when in-
iso-orientation patches orthogonally, as found in ani-
specting the histogram one can see
mals. However, some other boundaries seem to fol-
that there is a second peak at the
low fractures. Some pinwheels are duplicated, and
left, indicating that there are some
these interestingly lie at ocular dominance boundaries.
pinwheels which are very close to-
Therefore, these pinwheel neurons not only have a
gether. Therefore, the quality of the
weak selectivity for orientation, but also a weak selec-
orientation map slightly decreased
tivity for ocular dominance.
compared to the orientation-only
simulation.
Figure 6.2: Orientation map with overlaid ocular dominance boundaries
66
Chapter 6. Results
(a) Ocular preference map. One can see two
(b) Ocular selectivity map.
When com-
peaks, one at very low values and another
paring with the ocular preference map, it
one at very high values. This indicates that
emerges that neurons which are weakly se-
most neurons have a preference for one eye
lective (dark areas) do not have a preference
or the other.
for input from a certain eye.
Figure 6.3: Ocular dominance preference and selectivity
Figure 6.4: Ocular preference map of a LISSOM model for comparison. See also figure
2.3 for an ocular preference of a macaque monkey. Figure reprinted from Miikkulainen
et al. (2005)
6.3. Disparity preference
6.3
67
Disparity preference
A model driven by input patterns which have a position offset between the eyes does
not lead to realistic ocular preference maps, as shown in figure 6.5. The ocular dominance boundaries are very irregular. The same figure shows that the orientation map is
altered considerably. Iso-orientation areas are stripy rather than patchy, which results
in a non ring-shaped power spectrum.
The disparity map itself indicates that most neurons are not selective for disparity.
There are small areas of highly selective neurons, and it seems that there is a clear
organization of disparity preference in these areas, just like in animals. That most
neurons are not selective for disparity could explain the relatively few experimental
findings about disparity maps in animals.
(a) Orientation preference map with overlaid pin-
(b) Fourier power spectrum of the
wheels and contours visualizing the ocular dominance
orientation map. The spectrum in-
boundaries.
dicates that iso-orientation patches
The ocular dominance boundaries
are very irregular, originating from the low ocular
run vertically.
selectivity as printed in figure 6.6.
shaped spectrum elucidates that
patches tend to run vertically.
Iso-orientation
Usually, a ring-
from any one point, the same orientation preference on average will
occur again at a distance regardless of the direction.
Figure 6.5: Orientation map with overlaid ocular dominance boundaries for a disparity
simulation
68
Chapter 6. Results
(a) Disparity preference and selectivity map.
(b) Ocular selectivity map.
Compared to
Most neurons are not selective for disparity,
the simulation with brightness differences, it
and it seems there is a clear organization of
emerges that most neurons are not selective
neurons within areas which are selective for
for ocularity. This leads to irregular ocular
disparity.
dominance boundaries, as these are originating mostly from noise rather than actual
ocular preferences.
Figure 6.6: Disparity preference and selectivity + ocular selectivity for a disparity simulation
6.4
Ocular and disparity preference
For this simulation, Gaussian patterns with brightness differences as well as position
offsets between the eyes were used as training inputs. As for the ocular-only simulation, biologically realistic orientation maps and ocular dominance maps emerge. The
ocular dominance boundaries tend to cross orientation patches at a right angle. Again,
some duplicate pinwheels near ocular dominance boundaries are present. The disparity map looks qualitatively very similar to the one in the disparity-only simulation.
The histogram records a clear preference for disparities around 180 degrees, which is
reasonable as the position offset is always on the horizontal axis.
6.4. Ocular and disparity preference
69
(a) Orientation preference map with overlaid pinwheels
(b) Fourier power spectrum of the
and contours visualizing the ocular dominance bound-
orientation map. Compared to the
aries. Qualitatively, this map looks very similar to the
spectrum of the disparity-only sim-
ocularity-only simulation (see figure 6.2), except that
ulation, the spectrum is clearly ring-
there are now more ocular dominance boundaries that
shaped, indicating a higher qual-
follow orientation borders. Please also see this fig-
ity orientation map, similar to those
ure for discussion. Compared to figure 6.5, the ocular
found in animals.
dominance boundaries are of regular shape.
Figure 6.7: Orientation map with overlaid ocular dominance boundaries for a brightness
difference+disparity simulation
(a) Disparity preference and selectivity map.
(b) Ocular selectivity map. Most neurons are
As in the disparity-only simulation, most neu-
highly selective for one eye. This again il-
rons are not selective for disparity. Here, one
lustrates that brightness differences are driv-
area with especially high disparity selectivity
ing the development of ocularity maps, rather
is obvious.
than disparity in the input.
Figure 6.8: Disparity preference and selectivity + ocular selectivity for a disparity simulation
70
Chapter 6. Results
6.5
Direction preference
This section presents the resulting maps of the model in which temporal delays from
the LGN sheets to V1 are introduced. As discussed in 5.5, these are especially of
interest as this is a novel way of modeling motion selectiveness.
Figure 6.9 shows the resulting orientation map. Compared to the basic GCAL
model, the map quality decreased, as there are several areas with a cumulation of
nearby pinwheel neurons. The two dark points in the center of the Fourier plot make
also reveal the same fact, and there is no clear peak in the Fourier histogram.
The produced direction map is shown in figure 6.12. There, one can see that most
neurons are selective for the direction orthogonal to their orientation preference. Furthermore, there are areas where two direction patches are included in one orientation
patch. The connection fields of a highly selective neuron are shown in figure 6.10.
(a) Orientation preference map with overlaid pin-
(b) Fourier power spectrum of the
wheels. One can observe areas with a cumulation of
orientation map.
nearby pinwheel neurons, which are a sign of lower
tral dark points again indicate an
map quality.
accumulation of nearby pinwheels.
The two cen-
However, there is still an isotropic
ring visible.
Figure 6.9: Orientation map for the motion simulation
6.5. Direction preference
71
(a) Connection fields of the projections
(b) Corresponding connection fields of the
from the LGN Off sheet to V1
LGN On sheet to V1
Figure 6.10: Example connection fields of an direction selective neuron. The leftmost
projections are for time lag 0, and the time lag is increasing to the right. Here, the
neuron is selective for a pattern which is in the bottom left of the connection field at time
t = 0, and then moving upwards and slightly to the right. Please mind that the majority
of neurons does not have such a clear indication of direction preference.
Figure 6.11: Direction preference map. Brighter areas show higher selectiveness for
direction. The direction map looks similar to an orientation map, however with smaller
patches. This is because orientation is the larger scale organization in this simulation.
By increasing the speed of the input patterns, it is theoretically possible that direction
becomes the large scale organization (Miikkulainen et al., 2005), however this is contradicting the experimental findings and not shown here.
72
Chapter 6. Results
Figure 6.12: Orientation map overlaid with arrows showing the preferred direction.
Darker arrows correspond to higher selectivity and vice versa. The color key for orientation preference at the bottom of the figure allows better investigation of the orthogonality
between orientation and direction maps. As in animals, some orientation patches contain two direction patches of opposite direction preference. This overlaid map looks
similar to an overlaid map in a LISSOM simulation with multiple lagged LGN sheets
(figure 5.23 in Miikkulainen et al. (2005)).
6.6. Color preference
6.6
73
Color preference
The resulting maps of a model using the new color model with a single retina sheet are
presented here. Compared to the color map in Bednar et al. (2005), color is the largest
scale organization, resulting in preferences of a certain color for nearly all neurons
rather than clearly separate color blobs. In the previous model, color selective neurons
had only a weak orientation selectivity. Here, all neurons are approximately equally
orientation selective (see figure 6.14).
Please accept apologies that in this simulation there is a clear peak for reddish/yellowish colors, this is due to the weighting of the cone types. The color+ocular dominance preference shows a simulation with a better weighting, resulting in a wider range
of color preferences.
(a) Orientation preference map with overlaid pin-
(b) Fourier power spectrum of the
wheels. Compared to the basic GCAL model, the ori-
orientation map, for comparison
entation map is slightly distorted, but still of a high
with the basic GCAL model.
quality.
Figure 6.13: Orientation map for the color simulation
74
Chapter 6. Results
(a) Overlaid preference+selectivity map for
(b) Overlaid preference+selectivity map for
orientation.
Brighter areas correspond to
color. It emerges that all neurons are se-
higher selectiveness. In comparison to pre-
lective for color, and it seems that color is
vious models, all neurons are approximately
the largest-scale map organization. This is
equally selective for orientation, i.e. there are
in contrast to earlier studies, where only rela-
no weakly selective areas for orientation due
tively few neurons were color selective orga-
to highly color selective blobs.
nized in color blobs.
Figure 6.14: Overlaid preference+selectivity maps for orientation and color in a color
simulation
6.7
Color and ocular preference
Here, the resulting maps of a combined model for color and ocular preference are
presented. These are an important milestone, as the previous implementation in Topographica based on LISSOM did not produce realistic maps for this feature combination,
as discussed in section 5.8.
The orientation map is not altered considerably compared to the individual models.
The ring shaped Fourier spectrum indicates a high quality orientation map (not shown
here).
As for the color only model, the color map is the largest scale organization. Here,
there is a wider range of color preference, due to a different weighting of the cone
types. Also, the color map in figure 6.15 looks “sharper” which is due to a higher density of neurons compared to the color-only simulation. Again, please accept apologies
for this.
The ocular dominance boundaries look more patchy compared to the stripy boundaries in the individual ocular dominance model. This might be due to the interplay of
the ocular dominance and color map. As in animals, most pinwheels lie in the center
of ocular dominance patches.
6.8. Spatial frequency preference
75
(a) Orientation preference map with overlaid
(b) Overlaid color preference+selectivity
pinwheels and contours visualizing the oc-
map. Compared to the color-only simulation,
ular dominance boundaries. As in the in-
a wider range of colors is covered (see
dividual ocular dominance simulation, ocu-
histograms). Also, the map looks “sharper”
lar dominance boundaries tend to cross iso-
which is due to a higher cortical density in
orientation patches orthogonally, but not all
this simulation.
of them.
Again, some pinwheels are du-
plicated, however in this simulation not at
the ocular dominance boundaries. The ocular dominance boundaries are more patchy
compared to the stripy boundaries in the individual simulation.
Figure 6.15: Orientation and color maps with overlaid ocular dominance boundaries for
a color+ocular dominance simulation
6.8
Spatial frequency preference
Extending the basic GCAL model with spatial frequency channels allows neurons in
V1 to become selective for various spatial frequencies. As with most of the other
presented features, the orientation map in figure 6.16 is slightly distorted. The spatial
frequency map in figure 6.17 reveals that neurons become selective for a range of
different spatial frequencies. In this simulation, the range is quite small, however if a
fourth spatial frequency sheet is added, the range for which neurons become selective
gets wider. The connection fields of neurons in V1 show that almost all neurons have
higher weights for the spatial frequency channel selective for high frequencies in the
input compared to the other spatial frequency channels selective for lower frequencies
in the input. This is contrary to the previous implementation in LISSOM (Palmer,
2009), where some neurons became selective for the one channel while other neurons
76
Chapter 6. Results
(a) Orientation preference map with overlaid pin-
(b) Fourier power spectrum of the
wheels. The orientation map is slightly distorted, with
orientation map. The isotropic ring
some duplicated pinwheels. As with the other cortical
is clearly visible, however some pix-
maps where this occurs, this might be due to the inter-
els within the ring indicate distor-
play of the maps.
tions.
Figure 6.16: Orientation map for the spatial frequency simulation
became selective for others.
6.9
Combined model
Running the combined model is a difficult undertaking, as there are dozens of parameters which can be varied, and the computational resources required are enormous. On
a 24 core Intel Xeon X5650 with 24 gigabyte RAM, simulating the combined model
for 15000 training iterations and subsequent map measurement takes approximately
20 hours. At the time of writing, no parameter set was found which allowed the measurement of maps. This is likely due to activation values which are on average either
too high or too low. Then, the neurons in V1 do not organize into maps, and the measurement of map fails. Possible ways to resolve this issue are discussed in the next
chapter.
6.9. Combined model
(a)
Overlaid
77
preference+selectivity
map
(b) Spatial frequency selectivity map. Most
One can see that
neurons are somewhat selective for spa-
the preference in spatial frequency varies,
tial frequency. Some smaller areas appear
however the histogram shows that the range
with a high spatial frequency selectiveness,
is quite narrow.
whereas these prefer very high or very low
for spatial frequency.
spatial frequencies (see overlaid map on the
left).
(c) Overlaid preference+selectivity map for spatial frequency for a simulation with four spatial
frequency channels. In comparison to the simulation with three channels (see figure above),
a wider range of spatial frequencies is covered. Accept apologies that the colors do not match
between the two figures, instead please compare the histograms so that the differences
become visible.
Figure 6.17: Spatial frequency map
Chapter 7
Discussion and Future Work
Building an all maps model of the primary visual cortex is a difficult undertaking.
There are many scientific decisions which need to be made, for example, which sheets
to connect laterally for gain control. Furthermore, there are many parameters which
influence the resulting maps. Here, a discussion of the results of the previous chapter
is presented. Then, future research ideas are given. The chapter ends with suggestions
for improvements of Topographica, which would allow further investigation of the
complex interplay of several maps.
7.1
Discussion of the results
In this section, the results of the individual simulations are discussed further. Starting
with the basic GCAL model which can account for orientation preference, the other
cortical maps which emerge in individual models are investigated. Then, suggestions to
resolve the issue of not being able to measure maps in the all maps model are presented.
7.1.1
Orientation preference
In the simulation with the basic GCAL model, the high quality orientation maps could
be reproduced qualitatively. In fact, an exact replicate of the published GCAL model (Stevens
et al., 2013) can be created if desired. This is important seeing that the new class-based
way of defining the model is used. Although considerably simplifying the model definition and exploration, the instantiated models still have the same properties as with
the traditional way of defining models.
79
80
7.1.2
Chapter 7. Discussion and Future Work
Ocular dominance preference
When adding a second retina sheet to the simulation, and changing the input patterns
so they vary in their brightness between the retinas, biologically realistic ocular dominance maps emerge. Pinwheels are usually found in the center of ocular dominance
stripes. Some duplicated pinwheels, which indicate small areas of low orientation
selectiveness, occur near ocular dominance boundaries. The resulting maps are comparable to those in Miikkulainen et al. (2005).
7.1.3
Disparity preference
As found in previous studies, position offsets cannot account for ocular dominance
stripes in simulations using LISSOM/GCAL (Miikkulainen et al., 2005). All neurons
are binocular, i.e. not preferring input from one eye over the other. The disparity map
shows small areas of high disparity selectiveness, which could explain why so far no
large-scale disparity map was measured in animals (Kara and Boyd, 2009).
7.1.4
Ocular and disparity preference
Using inputs which have varying brightness and a position offset between eyes, biologically realistic ocular dominance and disparity maps emerge. The ocular dominance
stripes tend to cross iso-orientation patches orthogonally. In this simulation, there is a
clear peak for disparities around 180 degrees, which reflects the input statistics because
the position offset of the patterns is in x direction.
7.1.5
Direction preference
The direction map emerging of the new motion model with multiple time delayed
projections from the LGN sheets to V1 shows biologically realistic features. As in
animals, most neurons are selective for the direction orthogonal to their orientation
preference. Also, one iso-orientation patch often includes two smaller iso-direction
patches with opposite preference for direction. This demonstrates that multiple lagged
projections from the LGN level to V1 can account for biologically realistic direction
maps. Future work could investigate which parameters could improve the orientation
map quality. Here, the learning rate of the afferent connections to neurons in V1 was
decreased, as there are more incoming connections. One could also argue that the
7.1. Discussion of the results
81
strength of these afferent connection should be decreased because of the same argument.
7.1.6
Color preference
The parameters of the color model in use need further investigation. Previous models
have shown a clear separation of color blobs and orientation selective regions. With
the new color model, there are no separate areas anymore. Even if the ratio of the input
of color channels and luminosity channels to V1 is decreased, color is still the largest
scale organization. Increasing the strength of the luminosity channel leads to less color
selective neurons at an equally large scale. This might be due to the homeostasis
process in V1 of GCAL (Ball, 2014).
7.1.7
Color and ocular dominance preference
The combination of the ocular dominance model with the color model is one of the
many combinations one can model. It was shown that brightness differences introduced to natural images by converting them into HSV space and changing the value of
pixels result in similar results to the individual models. Furthermore, a better choice
of the cone scaling led to a hue map which shows a wider range of color preferences.
This points out how small changes in the parameter space can have a quite considerable
effect on the resulting maps.
7.1.8
Spatial frequency preference
The spatial frequency simulation has shown that neurons become selective for a range
of spatial frequencies. However, compared to the previous work in Palmer (2009), the
range is much smaller. This is due to the selectiveness of all neurons for one out of the
three spatial frequency channels. The existing variety in frequency preferences emerge
only because of a slightly higher weight to the other two spatial frequency channels of
some neurons.
7.1.9
Combined model
The combined model covering all known spatial maps has dozens of parameters to
control. Some of them are related to the input pattern generation, such as the speed
82
Chapter 7. Discussion and Future Work
for the sweeping of patterns or the weight of the individual color channels. Other parameters can control the architecture of the model, for example the amount of spatial
frequency channels or how many projections with temporal delays should be present
for modeling motion. Yet others are controlling the strengths and weights for the projections between the sheets. It is expected that tweaking these parameters is necessary
so that the all maps model results in useful maps.
In the trials to run the all maps model, it was not possible to generate any maps
at all. This is likely due to an on average too high or too low activation of neurons
in V1, which then in turn do not respond appropriately to the measurement patterns.
Therefore, a parameter search over different strengths from the retina sheets to the
LGN sheets, as well as for the strengths from the LGN sheets to V1, is recommended.
The two parameters should be changed independently of each other.
It is expected that once a suitable parameter set is found, the all maps model will
result in maps for all feature dimensions. However, in this project a parameter search
was not possible due to the high computational resources which are needed; one simulation with 15000 training iterations takes about 20 hours on a fairly fast machine. It
appears that using a cluster is unavoidable to run multiple simulations.
The resulting maps are likely to be distorted compared to the individual models, as
a high degree of interdependence is expected. However, such maps will reveal open
issues with the GCAL model, and in turn can provide hints where improvements might
be necessary.
7.1.10
Summary
The resulting maps of the individual models have shown for the first time that GCAL
can account for all known cortical maps in separate simulations. Previously, this was
shown for LISSOM, the predecessor of GCAL. Building an all maps model is still
an open issue, which is complex because of the interplay of all the different features
and their corresponding model properties as well as the vast number of parameters.
Compared to the previous LISSOM all maps model, it was shown that the combination
of color maps and ocular dominance maps can be successfully established.
7.2. Future work scientifically
7.2
83
Future work scientifically
In this section, a variety of possible future research topics is presented. These are only
a small subset of the many topics that can still be investigated using computational
models of the visual cortex, with a focus on topics which require nearly all/all maps to
be simulated simultaneously.
7.2.1
Interdependence of maps
A combined model of all known cortical maps allows the examination of various previous proposals. The investigation of the interdependence of various feature maps could
be driven further by creating more models with various feature combinations. The
ocular dominance+color model is a step in the right direction, but the full product of
all feature combinations should be simulated, to see in detail which dimension affects
which other dimension. The proposal of a very clear and significant interdependence
of maps in Yu et al. (2005) could be validated using this technique.
7.2.2
Uniform coverage
One research goal is to understand the functionality of cortical maps. It has been suggested that cortical maps might be optimized for completeness and continuity, which
are competing principles (see section 3.4). An investigation of completeness and continuity of an all maps model is desirable, and could give an answer to the controversial
question whether cortical maps are optimized for uniform coverage.
7.2.3
Relative order of map development
Also, by varying inputs within a single simulation, one could test whether the relative
order of map development corresponds to different map properties, as suggested in
Goodhill and Cimponeriu (2000). As a starting point, two models of the same structure
as for an ocular dominance simulation could be created. Then, in one of the models
the first 10000 simulations are run with patterns of equal brightness but varying orientation. After 10000 iterations, brightness differences are supplemented. In this model,
the orientation map develops before the ocular dominance map. For the second model,
this procedure could be reverted, by showing Gaussians of only one orientation but
varying brightness in the first 10000 iterations.
84
Chapter 7. Discussion and Future Work
7.2.4
Gaussian stimuli for color and spatial frequency
For the color model, it would be desirable to be able to use colorized Gaussian inputs.
These could be controlled in detail by the modeler, which is not the case at all for
natural images. So far, there has been no way found to imitate the complex relationship
between foreground and background found in natural images. In natural images, hue
usually changes slowly, and often brightness changes without changes in the hue value.
A starting point could be a Gaussian pattern of a random hue, set on a background of
the same hue, but different brightness. However, a tentative draft of such a pattern did
not lead to a meaningful color map so far.
Similarly, randomly varying the size of Gaussian patterns to simulate varying spatial frequency (as described in section 4.1) did not lead to a meaningful spatial frequency map. Compared to colorized Gaussian inputs, resolving this issue should not
be as hard.
7.2.5
Lateral connections between spatial frequency channels
Also related to models including spatial frequency are the extents of the lateral connection between spatial frequency channels. Usually, the extent of the lateral connection
is (approximately) as large as the receptive field of a neuron in the corresponding LGN
sheet. However, the sizes of the receptive fields depends on the spatial frequency channel. Therefore, when connecting sheets across spatial frequency channels, it is not clear
whether the size of the lateral connection should be as large as the receptive field of the
incoming sheet, or the outgoing sheet. One could also imagine some ratio of incoming
to outgoing channel. Each extend is expected to lead to different characteristics, which
need to be discovered in future research.
7.3
Future work for Topographica
Topographica is a powerful simulator for computational modeling neural maps, and
includes many helpful and advanced functions. However, there are still some open
issues, especially when multiple maps are investigated. Here, some suggestions for
future functions which would improve Topographica are presented.
7.3. Future work for Topographica
7.3.1
85
Improved visualization
From a software point of view, the extension of the library “dataviews” which is used
by Topographica to be able to overlay different cortical maps is desirable for better visualization of the interplay of maps. Thus far, it is only possible to overlay boundaries
and points on a map, as done when overlaying the ocular dominance boundaries on the
orientation map, and additionally inserting points indicating pinwheel neurons. One
could imagine arrows as in the orientation map overlaid by direction arrows, which
was done manually for this thesis. The length could not only have varying brightness
to visualize selectiveness, but also varying length. This would allow more dimensions
to be visualized within a single graphic.
The same library could also be extended in a way that the angles of crossings
between the maps could be easily calculated. This would allow comparison to other
models and experiments with animals where this property is often stated. This is more
reliable than a visual inspection, and one could use them as statistical measurement to
investigate the interdependence of maps.
7.3.2
Stereo camera input streams
The investigation of models which are created using a stereo camera as the input source
is another interesting research idea. A stereo camera could provide input similar to
those of natural images, but successive images could potentially account for motion.
The input could be used directly, but possibly one wishes to introduce brightness differences so a model with realistic ocular dominance maps could emerge.
7.3.3
Component based submodels
Another important improvement would be changing the class-based submodels system to be component based rather than inheritance based, as discussed in section 4.4.
This will be necessary to build models which include higher visual areas and feedback
connections between the cortical areas.
Chapter 8
Conclusions
Neurons in the primary visual cortex of mammals show preferences for a variety of
features, such as orientation and ocular dominance. These preferences can be visualized in cortical maps, where a regular organization of the neurons becomes visible.
For example, nearby neurons in V1 have preferences for similar orientations. There
is evidence that the map structure depends on the input characteristics, and therefore
each feature results in a distinct map.
It is thought that cortical maps emerge due to the fact that a high dimensional input
space is mapped on a two dimensional set of neurons. Then, an interdependence of
all feature preferences seems unavoidable. One highly controversial suggestion is that
cortical maps are organized for uniform coverage, i.e. there is a trade-off between
continuity and completeness (Swindale et al., 2000).
In general, the function of cortical maps is still an open subject. It was found that
there is no orientation map in rats, although neurons were found to be highly selective
for orientation (Ohki et al., 2005). Also, it is unclear whether there are cortical maps
in higher visual areas, where the presentation of more complex visual inputs is needed
in order to get reliable responses of neurons.
In this thesis, three families of models resulting in biologically realistic cortical
maps have been reviewed. Nearly all of them model only a limited, small subset of
features, with the exception of Gerasymova (2009), where the predecessor of GCAL
was used to implement an all maps model. However, the combination of color and
ocular dominance was known not to work, and the resulting spatial frequency map was
not of a high quality either. More importantly, the model by Gerasymova (2009) is
highly inflexible and difficult to use.
In this thesis, a superior way of defining models was presented, where it is more
87
88
Chapter 8. Conclusions
obvious how large amounts of sheets and projections can be defined, especially for
complex models such as the combined all maps model. Rather than manually connecting sheets with deeply nested loops, match conditions were introduced allowing the
fully automatic wiring up of sheets. Furthermore, the inspection of model properties
was improved significantly, and is now possible before the (time and memory consuming) model instantiation. At the time of writing, several other users had already
migrated to this new system, illustrating a considerable improvement in the software
design.
The basic GCAL model with neurons selective for orientation was rebuilt using the
novel way of defining models. Then, a series of models with feature preferences for
orientation and one of the other input dimensions was presented. There, it emerged
that the principles of GCAL can account for all other feature maps. A novel way of
modeling motion using temporal delays from the LGN sheets to V1 was used, and it
was shown that this results in direction maps similar to previous proposals and animal
studies.
Following this, a model which accounts for orientation, color and ocular dominance
preference was described, showing how multiple models can be joined to build a more
complex model. This feature combination was chosen because it was known not to
work in the previous attempt of building an all maps model. The combined model
resulted in a set of cortical maps comparable to those of animals.
The idea of combining models was taken further and a model which in principle
can account for all cortical maps simultaneously was drafted. However, the complexity
of this model and the corresponding parameters which have to be carefully tuned did
not allow the running of this model in a way that it results in cortical maps at this point
of time.
In summary, this thesis resulted in major improvements of the modeling software
Topographica, allowing modelers to focus on scientific questions rather than implementing code. The pattern coordinator allows the use of predefined input patterns, and
the class-based submodels system improves the work-flow in various ways. A novel
way of modeling motion with temporal delays from LGN sheets to V1 was defined,
which is biologically plausible, in contrast to the previous implementation in Topographica with multiple lagged retina sheets. An all maps model was proposed, but the
time-consuming investigation of the complex interplay of parameters prohibited using
this model to produce cortical maps. This is not thought to be a failure of the underlying principles of GCAL, but an issue in finding a parameter set which drives the
activation of neurons in V1 in a suitable way. Investigating the influence of parameters
on this complex model is expected to become a research project on its own.
Bibliography
Ackman, J. B. and Crair, M. C. (2014). Role of emergent neural activity in visual map
development. Current Opinion in Neurobiology, 24(1):166–75.
Adler, F. H., Kaufman, P. L., Levin, L. A., and Alm, A. (2011). Adler’s Physiology of
the Eye. Elsevier Health Sciences.
Ball, C. E. (2014). Modeling the development of primate color vision. Manuscript in
preparation, The University of Edinburgh.
Barlow, H. B., Blakemore, C., and Pettigrew, J. D. (1967). The neural mechanism of
binocular depth discrimination. The Journal of Physiology, 193(2):327–42.
Bear, M. F., Connors, B., and Paradiso, M. (2006). Neuroscience: Exploring the Brain.
Lippincott Williams & Wilkins, 3rd edition.
Bednar, J. A. (2009). Topographica: building and analyzing map-level simulations
from Python, C/C++, MATLAB, NEST, or NEURON components. Frontiers in
Neuroinformatics, 3:8.
Bednar, J. A. (2012). Building a Mechanistic Model of the Development and Function
of the Primary Visual Cortex. Journal of Physiology, 106:194–211.
Bednar, J. A. and Miikkulainen, R. (2006). Joint Maps for Orientation, Eye, and
Direction Preference in a Self-Organizing Model of V1. Neurocomputing, 69:1272–
1276.
Bednar, J. A., Paula, J. B. D., and Miikkulainen, R. (2005). Self-organization of color
opponent receptive fields and laterally connected orientation maps. Neurocomputing, 65–66:69–76.
Blasdel, G. G. (1992a). Differential Imaging of Ocular Dominance and Orientation
Selectivity in Monkey Striate Cortex. The Journal of Neuroscience, 12(8):3115–38.
89
90
Bibliography
Blasdel, G. G. (1992b). Orientation Selectivity, Preference, and Continuity in Monkey
Striate Cortex. The Journal of Neuroscience, 12(8):3139–3161.
Blasdel, G. G., Obermayer, K., and Kiorpes, L. (1995). Organization of Ocular Dominance and Orientation Columns in the Striate Cortex of Neonatal Macaque Monkeys. Visual Neuroscience, 12(3):589–603.
Blasdel, G. G. and Salama, G. (1986). Voltage-sensitive dyes reveal a modular organization in monkey striate cortex. Nature, 321(6070):579–85.
Bosking, W. H., Zhang, Y., Schofield, B. R., and Fitzpatrick, D. (1997). Orientation
Selectivity and the Arrangement of Horizontal Connections in Tree Shrew Striate
Cortex. The Journal of Neuroscience, 17(6):2112–2127.
Burger, T. and Lang, E. W. (1999). An Incremental Hebbian Learning Model of the
Primary Visual Cortex with Lateral Plasticity and Real Input Patterns. Zeitschrift für
Naturforschung C — A Journal of Biosciences, 54:128–140.
Burger, T. and Lang, E. W. (2001). Self-Organization of Local Cortical Circuits and
Cortical Orientation Maps: A Nonlinear Hebbian Model of the Visual Cortex with
Adaptive Lateral Couplings. Zeitschrift für Naturforschung C — A Journal of Biosciences, 56:464–478.
Carreira-Perpiñán, M. a. and Goodhill, G. J. (2002). Are Visual Cortex Maps Optimized for Coverage? Neural Computation, 14(7):1545–60.
Carreira-Perpiñán, M. A., Lister, R. J., and Goodhill, G. J. (2005). A Computational
Model for the Development of Multiple Maps in Primary Visual Cortex. Cerebral
Cortex, 15(8):1222–1233.
Catania, K. C., Lyon, D. C., Mock, O. B., and Kaas, J. H. (1999). Cortical organization
in shrews: evidence from five species. The Journal of Comparative Neurology,
410(1):55–72.
Connolly, M. and Van Essen, D. (1984). The Representation of the Visual Field in
Parvicellular and Magnocellular Layers of the Lateral Geniculate Nucleus in the
Macaque Monkey. The Journal of Comparative Neurology, 226(4):544–64.
Crair, M. C., Gillespie, D. C., and Stryker, M. P. (1998). The Role of Visual Experience
in the Development of Columns in Cat Visual Cortex. Science, 279:566–570.
Bibliography
91
Crair, M. C., Ruthazer, E. S., Gillespie, D. C., and Stryker, M. P. (1997). Relationship
between the Ocular Dominance and Orientation Maps in Visual Cortex of Monocularly Deprived Cats. Neuron, 19(2):307–18.
Crick, F. H. C. and Asanuma, C. (1986). Certain Aspects of the Anatomy and Physiology of the Cerebral Cortex. In McClelland, J. L., Rumelhart, D. E., and PDP
Research Group, C., editors, Parallel Distributed Processing, pages 333–371. MIT
Press, Cambridge, MA, USA.
Dacey, D. M. (2000). Parallel Pathways for Spectral Coding in Primate Retina. Annual
Review of Neuroscience, 23:743–775.
Denk, W., Strickler, J. H., and Webb, W. W. (1990). Two-Photon Laser Scanning
Fluorescence Microscopy. Science, 248(4951):73–76.
Espinoza, S. G. and Thomas, H. C. (1983). Retinotopic organization of striate and
extrastriate visual cortex in the hooded rat. Brain Research, 272(1):137–44.
Famiglietti, E. and Kolb, H. (1976). Structural basis for ON-and OFF-center responses
in retinal ganglion cells. Science, 194(4261):193–195.
Földiák, P. (2002). Sparse coding in the primate cortex. In Arbib, M. A., editor, The
Handbook of Brain Theory and Neural Networks, pages 1064–1068. MIT Press, 2nd
edition.
Gerasymova, K. (2009). Computational Model of All Known Feature Maps in the
Primary Visual Cortex. Student research project, Humboldt-Universität zu Berlin,
Germany.
Gilbert, C. D., Hirsch, J. A., and Wiesel, T. N. (1990). Lateral Interactions in Visual
Cortex. In The Brain, volume LV of Cold Spring Harbor Symposia on Quantitative
Biology, pages 663–677, Cold Spring Harbor, NY. Cold Spring Harbor Laboratory
Press.
Goodhill, G. J. (2007). Contributions of Theoretical Modeling to the Understanding of
Neural Map Development. Neuron, 56(2):301–311.
Goodhill, G. J. and Cimponeriu, A. (2000). Analysis of the Elastic Net Model Applied to the Formation of Ocular Dominance and Orientation Columns. Network:
Computation in Neural Systems, 11:153–168.
92
Bibliography
Hebb, D. O. (1949). The Organization of Behavior: A Neuropsychological Theory.
Wiley, Hoboken, NJ.
Holmes, G. (1918). Disturbances of Visual Orientation. British Journal of Ophthalmology, 2(9):449–468.
Horton, J. C. and Hocking, D. R. (1996). An Adult-like Pattern of Ocular Dominance
Columns in Striate Cortex of Newborn Monkeys Prior to Visual Experience. The
Journal of Neuroscience, 16(5):1791–1807.
Hubel, D. H. and Wiesel, T. N. (1959). Receptive fields of single neurones in the cat’s
striate cortex. The Journal of Physiology, 148:574–591.
Hubel, D. H. and Wiesel, T. N. (1968). Receptive Fields and Functional Architecture
of Monkey Striate Cortex. The Journal of Physiology, 195:215–243.
Hubel, D. H., Wiesel, T. N., and LeVay, S. (1977). Plasticity of Ocular Dominance
Columns in Monkey Striate Cortex. Philosophical Transactions of the Royal Society
of London. Series B, Biological Sciences, 278:377–409.
Huberman, A. D., Speer, C. M., and Chapman, B. (2006). Spontaneous Retinal Activity Mediates Development of Ocular Dominance Columns and Binocular Receptive
Fields in V1. Neuron, 52(2):247–254.
Hurvich, L. M. and Jameson, D. (1957). An opponent-process theory of color vision.
Psychological Review, 64(6, Pt.1):384–404.
Hyvärinen, A. and Hoyer, P. O. (2001). A Two-Layer Sparse Coding Model Learns
Simple and Complex Cell Receptive Fields and Topography From Natural Images.
Vision Research, 41(18):2413–2423.
Hyvärinen, A., Hurri, J., and Hoyer, P. O. (2009). Natural Image Statistics: A Probabilistic Approach to Early Computational Vision. Springer Publishing Company,
Incorporated, 1st edition.
Issa, N. P., Trepel, C., and Stryker, M. P. (2001). Spatial Frequency Maps in Cat Visual
Cortex. The Journal of Neuroscience, 20:8504–8514.
Joblove, G. H. and Greenberg, D. (1978). Color spaces for computer graphics. ACM
SIGGRAPH Computer Graphics, 12(3):20–25.
Bibliography
93
Kaas, J. (2001). The organization of sensory cortex. Current Opinion in Neurobiology,
11(4):498–504.
Kara, P. and Boyd, J. D. (2009). A micro-architecture for binocular disparity and ocular
dominance in visual cortex. Nature, 458(7238):627–31.
Kneisel, Y. (2013). Feasibility of Random Wiring in Primate Colour Vision. Masters
thesis, The University of Edinburgh, UK.
Kohonen, T. (1982). Self-Organized Formation of Topologically Correct Feature
Maps. Biological Cybernetics, 43:59–69.
Kohonen, T. (1990). The Self-Organizing Map. Proceedings of the IEEE, 78(9):1464–
1480.
Kohonen, T. (2001). Self-Organizing Maps. Springer, Berlin, 3rd edition.
Landisman, C. E. and Ts’o, D. Y. (2002). Color Processing in Macaque Striate Cortex:
Relationships to Ocular Dominance, Cytochrome Oxidase, and Orientation. Journal
of Neurophysiology, 87(6):3126–3137.
Liu, W., Tao, D., Cheng, J., and Tang, Y. (2014). Multiview Hessian discriminative
sparse coding for image annotation. Computer Vision and Image Understanding,
118:50–60.
Löwel, S., Bischof, H.-J. J., Leutenecker, B., and Singer, W. (1988). Topographic
relations between ocular dominance and orientation columns in the cat striate cortex.
Experimental Brain Research, 71(1):33–46.
Miikkulainen, R., Bednar, J. A., Choe, Y., and Sirosh, J. (2005). Computational Maps
in the Visual Cortex. Springer-Verlag.
Milner, A. D. and Goodale, M. A. (1998). The Visual Brain in Action. Number 27.
Oxford University Press, USA.
Mishkin, M., Ungerleider, L. G., and Macko, K. A. (1983). Object vision and spatial
vision: two cortical pathways. Trends in Neurosciences, 6:414–417.
Müller, T., Stetter, M., Hubener, M., Sengpiel, F., Bonhoeffer, T., Gödecke, I., Chapman, B., Löwel, S., and Obermayer, K. (2000). An Analysis of Orientation and
Ocular Dominance Patterns in the Visual Cortex of Cats and Ferrets. Neural Computation, 12(11):2573–2595.
94
Bibliography
Nauhaus, I., Nielsen, K. J., Disney, A. a., and Callaway, E. M. (2012). Orthogonal
micro-organization of orientation and spatial frequency in primate primary visual
cortex. Nature neuroscience, 15(12):1683–90.
Ohki, K., Chung, S., Ch’ng, Y. H., Kara, P., and Reid, R. C. (2005). Functional imaging
with cellular resolution reveals precise micro-architecture in visual cortex. Nature,
433(7026):597–603.
Olmos, A. and Kingdom, F. A. A. (2004). A biologically inspired algorithm for the
recovery of shading and reflectance images. Perception, 33(12):1463–73.
Olshausen, B. a. and Field, D. J. (2004). Sparse coding of sensory inputs. Current
Opinion in Neurobiology, 14(4):481–7.
Palmer, C. M. (2009). Topographic and Laminar Models for the Development and Organisation of Spatial Frequency and Orientation in V1. PhD thesis, The University
of Edinburgh.
Paula, J. B. D. (2007). Modeling the self-organization of color selectivity in the visual
cortex. PhD thesis, The University of Texas at Austin.
Pitkow, X. and Meister, M. (2012). Decorrelation and efficient coding by retinal ganglion cells. Nature neuroscience, 15(4):628–35.
Poggio, G. F. and Fischer, B. (1977). Binocular Interaction and Depth Sensitivity in
Striate and Prestriate Cortex of Behaving Rhesus Monkey. Journal of Neurophysiology, 40(6):1392–405.
Rao, S. C., Toth, L. J., and Sur, M. (1997). Optically Imaged Maps of Orientation Preference in Primary Visual Cortex of Cats and Ferrets. The Journal of Comparative
Neurology, 387(3):358–370.
Reh, T. A. and Constantine-Paton, M. (1985). Eye-specific Segregation Requires Neural Activity in Three-Eyed Rana pipiens. The Journal of Neuroscience, 5(5):1132–
43.
Ribot, J., Aushana, Y., Bui-Quoc, E., and Milleret, C. (2013). Organization and Origin
of Spatial Frequency Maps in Cat Visual Cortex. The Journal of Neuroscience,
33(33):13326–43.
Bibliography
95
Ritter, H. (1991). Asymptotic Level Density for a Class of Vector Quantization Processes. IEEE Transactions on Neural Networks, 2:173–175.
Rochester, N., Holland, J. H., Haibt, L. H., and Duda, W. L. (1956). Tests on a Cell
Assembly Theory of the Action of the Brain, Using a Large Digital Computer. IRE
Transactions on Information Theory, 2:80–93.
Rolls, E. T. and Tovee, M. J. (1995). Sparseness of the Neuronal Representation
of Stimuli in the Primate Temporal Visual Cortex. Journal of Neurophysiology,
73(2):713–26.
Saul, A. B. and Humphrey, A. L. (1990). Spatial and Temporal Response Properties of Lagged and Nonlagged Cells in Cat Lateral Geniculate Nucleus. Journal of
Neurophysiology, 64(1):206–24.
Schein, S. J. (1988). Anatomy of macaque fovea and spatial densities of neurons in
foveal representation. The Journal of Comparative Neurology, 269(4):479–505.
Sharma, J., Angelucci, A., and Sur, M. (2000). Induction of Visual Orientation Modules in Auditory Cortex. Nature, 404:841–847.
Shatz, C. J. and Stryker, M. P. (1978). Ocular Dominance in Layer IV of the Cat’s
Visual Cortex and the Effects of Monocular Deprivation. The Journal of Physiology,
281:267–283.
Sirosh, J., Miikkulainen, R., and Bednar, J. A. (1996). Self-Organization of Orientation
Maps, Lateral Connections, and Dynamic Receptive Fields in the Primary Visual
Cortex. In Sirosh, J., Miikkulainen, R., and Choe, Y., editors, Lateral Interactions in
the Cortex: Structure and Function. The UTCS Neural Networks Research Group,
Austin, TX.
Sirovich, L. and Uglesich, R. (2004). The organization of orientation and spatial frequency in primary visual cortex. Proceedings of the National Academy of Sciences
of the United States of America, 101(48):16941–6.
Solomon, S. G. and Lennie, P. (2005). Chromatic Gain Controls in Visual Cortical
Neurons. The Journal of Neuroscience, 25(19):4779–92.
Spigler, G. (2014). Neural modelling of the McCollough Effect in color vision. Masters
thesis (in print), The University of Edinburgh.
96
Bibliography
Stevens, J.-L. R., Law, J. S., Antolik, J., and Bednar, J. A. (2013). Mechanisms for Stable, Robust, and Adaptive Development of Orientation Maps in the Primary Visual
Cortex. The Journal of Neuroscience, 33:15747–15766.
Swindale, N. V. (2000). How Many Maps are there in Visual Cortex? Cerebral Cortex,
10(7):633–43.
Swindale, N. V. (2004). How different feature spaces may be represented in cortical
maps. Network: Computation in Neural Systems, 15(4):217–242.
Swindale, N. V. (2006). Cerebral Cortex: The Singular Precision of Visual Cortex
Maps. Current Biology, 16(23):R991–R994.
Swindale, N. V., D, S., A, G., T, B., and M, H. (2002). Reply to Carreira-Perpiñán and
Goodhill. Neural Computation, 14(9):2053–2056.
Swindale, N. V., Shoham, D., Grinvald, A., Bonhoeffer, T., and Hubener, M. (2000).
Visual Cortex Maps Are Optimized for Uniform Coverage. Nature neuroscience,
3(8):822–826.
Tani, T., Ribot, J., O’Hashi, K., and Tanaka, S. (2012). Parallel development of orientation maps and spatial frequency selectivity in cat visual cortex. The European
Journal of Neuroscience, 35(1):44–55.
Tessier-Lavigne, M. and Goodman, C. S. (1996). The Molecular Biology of Axon
Guidance. Science, 274(5290):1123–1133.
Tusa, R. J. and Palmer, L. a. (1980). Retinotopic Organization of Areas 20 and 21 in
the Cat. The Journal of Comparative Neurology, 193(1):147–64.
Tusa, R. J., Palmer, L. a., and Rosenquist, a. C. (1978). The Retinotopic Organization of area 17 (Striate Cortex) in the Cat. The Journal of Comparative Neurology,
177(2):213–35.
Udin, S. B. and Fawcett, J. W. (1988). Formation of topographic maps. Annual Review
of Neuroscience, 11:289–327.
Van Essen, D. C., Newsome, W. T., and Maunsell, J. H. (1984). The visual field
representation in striate cortex of the macaque monkey: Asymmetries, anisotropies,
and individual variability. Vision Research, 24(5):429–448.
Bibliography
97
van Ooyen, A. (2011). Using theoretical models to analyse neural development. Nature
reviews. Neuroscience, 12(6):311–26.
Wässle, H., Grünert, U., Chun, M. H., and Boycott, B. B. (1995). The Rod Pathway of
the Macaque Monkey Retina: Identification of AII-Amacrine Cells with Antibodies
Against Calretinin. The Journal of Comparative Neurology, 361(3):537–51.
Weliky, M., Bosking, W. H., and Fitzpatrick, D. (1996). A Systematic Map of Direction
Preference in Primary Visual Cortex. Nature, 379:725–728.
White, L. E. and Fitzpatrick, D. (2007). Vision and Cortical Map Development. Neuron, 56(2):327–38.
Xiao, Y. (2014). Hierarchy of Hue Maps in the Primate Visual Cortex. Journal of
Ophthalmic & Vision Research, 9(1):144–7.
Xiao, Y., Casti, A., Xiao, J., and Kaplan, E. (2007). Hue Maps in Primate Striate
Cortex. Neuroimage, 35(2):771–786.
Xiao, Y., Wang, Y., and Felleman, D. J. (2003). A spatially organized representation
of color in macaque cortical area V2. Nature, 421:535–539.
Yu, H., Farley, B. J., Jin, D. Z., and Sur, M. (2005). The Coordinated Mapping of
Visual Space and Response Features in Visual Cortex. Neuron, 47(2):267–280.
Zhang, S., Yao, H., Sun, X., and Lu, X. (2013). Sparse coding based visual tracking:
Review and experimental comparison. Pattern Recognition, 46(7):1772–1788.