Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Math 7350
Geometry of Manifolds
Dr. Vaughn Climenhaga, PGH 651A
Spring 2015
Selected HW solutions
HW 1, #1. (Lee, Problem 1-4). Locally finite covers
Let M be a topological manifold, and let U be an open cover of M .
(a) Suppose each set in U intersects only finitely many others. Show
that U is locally finite – that is, every point of M has a neighbourhood that intersects at most finitely many of the sets in U.
Solution. Given x ∈ M , there is U ∈ U such that x ∈ U ,
because U covers M . Now U is a neighbourhood of x, and by
the hypothesis, U intersects only finitely many of the sets in U.
Thus U is locally finite.
(b) Give an example showing that the converse may be false.
Solution. Take any infinite but locally finite cover U (for example, U = {(n − 1, n + 1) | n ∈ Z} with M = R), and define
a new cover V = U ∪ {M }. Then V is still locally finite but it
has a set (M ) that intersects infinitely other cover elements.
(c) Show that the converse is true if the elements of U are precompact (have compact closures).
Solution. Suppose U is locally finite. Thus for every x ∈ M
there is a neighbourhood Vx such that Vx intersects only finitely
many of the sets in U. Let U ∈ U be precompact. Then U is
compact and is covered by the open sets Vx , so it is covered by
finitely many of them, say Vx1 , . . . , Vxn . Any element of U that
intersects U must intersect one of the Vxi . Since each of these
only intersects finitely many elements of U, the same is true of
U , and hence of U .
Math 7350
Selected HW solutions
Page 2 of 30
HW 1, #2. (Lee, Problem 1-6). Distinct smooth structures
Let M be a nonempty topological manifold of dimension n ≥ 1. If M
has a smooth structure, show that it has uncountably many distinct
ones. [Hint: first show that for any s > 0, Fs (x) = |x|s−1 x defines a
homeomorphism from the unit ball in Rn to itself, which is a diffeomorphism if and only if s = 1.]
Solution. First we prove the hint. Given x ∈ Rn \ 0 write x̂ = x/|x|
for the normalisation of x. Note that given s > 0 and x ∈ Bn (the unit
ball in Rn ) we have
Fs (x) = |x|s x̂,
so in particular |Fs (x)| < 1 whenever |x| < 1, and we have Fs (Bn ) ⊂ Bn .
Moreover, given s, t > 0 we have
Fs ◦ Ft (x) = Fs (|x|t x̂) = |x|st x̂ = Fst (x).
In particular, Fs ◦ F1/s is the identity, so Fs is a bijection from Bn
P
to itself. Note that x 7→ |x|s = ( i (xi )2 )s/2 is a continuous function
Bn → R (as a composition of continuous functions), and x 7→ x̂ is
continuous on Bn \ 0, so Fs is continuous (in fact smooth) on Bn \ 0.
Moreover, Fs (x) → 0 as x → 0, so Fs is continuous on Bn . Its inverse
F1/s is continuous as well, so Fs is a homeomorphism. If s 6= 1 then Fs
is a diffeomorphism (the identity). If s < 1 then Fs is not differentiable
at 0. If s > 1 then Fs−1 = F1/s is not C 1 at 0. Thus Fs is not a
diffeomorphism for any s 6= 1.
Now we use the hint to prove the result. Let A be any smooth atlas
on M . Fix p ∈ M and (U, ϕ) ∈ A such that p ∈ U . Since ϕ(U ) ⊂
Rn is open there is r > 0 such that B(ϕ(p), r) ⊂ ϕ(U ). Let V =
ϕ−1 (B(ϕ(p), r)) ⊂ U , and define ψ : U → Rn by
ψ(q) = (ϕ(q) − ϕ(p))/r.
Note that ψ(p) = 0 and ψ(V ) = Bn . Let A∗ = A ∪ {(V, ψ)} and
note that A∗ is smooth because every transition map involving (V, ψ)
is the composition of a linear map and a transition map involving ϕ.
Given (W, θ) ∈ A∗ , let W 0 = W \ {p} and θ0 = θ|0W . Let A0 be the
atlas obtained from A∗ by replacing every (W, θ) (except (V, ψ)) with
(W 0 , θ0 ); this is again a smooth atlas.
Math 7350
Selected HW solutions
Page 3 of 30
Given s > 0, let As be the atlas obtained from A0 by replacing (V, ψ)
with (V, Fs ◦ ψ). Note that this is an atlas because Fs is a homeomorphism from Bn = ψ(V ) to itself. It is a smooth atlas because every
transition map is the composition of Fs (away from 0) with a transition
map from A0 . Thus it defines a unique smooth structure. Finally, if
As and At define the same smooth structure, then the transition map
between (V, Fs ◦ ψ) and (V, Ft ◦ ψ) must be a diffeomorphism. This
transition map is given by
(Fs ◦ ψ) ◦ (Ft ◦ ψ)−1 = Fs ◦ Ft−1 = Fs/t ,
so it is a diffeomorphism if and only if s = t. Thus the smooth structures induced by As are distinct for s > 0, so there are uncountably
many distinct smooth structures on M .
HW 1, #4. (Lee, Problem 1-9). Complex projective n-space
Complex projective n-space, denoted by CP n , is the set of all 1-dimensional
complex-linear subspaces of Cn+1 , with the quotient topology inherited
from the natural projection π : Cn+1 \ {0} → CP n . Show that CP n is
a compact 2n-dimensional topological manifold, and show how to give
it a smooth structure analogous to the one we constructed for RP n .
Note that we identify Cn+1 with R2n+2 via the correspondence
(x1 + iy 1 , . . . , xn+1 + iy n+1 ) ↔ (x1 , y 1 , . . . , xn+1 , y n+1 ).
Solution. Given 1 ≤ j ≤ n + 1, let Ũj = {(z 1 , . . . , z n+1 ) ∈ Cn+1 | z j 6=
0}. Define a map ϕ̃j : Ũj → Cn by
1
z j−1 z j+1
z n+1
z
1
n+1
ϕ̃j (z , . . . , z ) =
,..., j , j ,..., j
.
zj
z
z
z
Then ϕ̃j is continuous and is constant on fibres of π, so there is a
unique continuous map ϕj : Uj := π(Ũj ) → Cn such that the following
Math 7350
Selected HW solutions
Page 4 of 30
diagram commutes.
Cn+1 \ 0
⊃
π
Ũj
π
CP
n
⊃
ϕ̃j
/
n
C
?
ϕj
Uj
Moreover, ϕj is a bijection since its inverse is given by (w1 , . . . , wn ) 7→
[w1 , . . . , wj−1 , 1, wj+1 , . . . , wn ], and ϕ−1
is continuous since it is the
j
composition of continuous maps. Thus ϕj is a homeomorphism, and
since we identify Cn with R2n , we have shown that CP n is locally Euclidean.
To show CP n is a topological manifold it remains to show that it is
second countable and Hausdorff. The first of these follows since it is
a quotient of a second countable space. For Hausdorff, note that if
[z1 ], [z2 ] ∈ Uj for some j, then they can be separated by disjoint open
sets since the same is true of ϕj (z1 ), ϕj (z2 ) ∈ Cn . So we consider the
case where there is no Uj containing both [z1 ] and [z2 ]. Given j 6= k let
Aj,k = {[z] | |z j | > |z k |} ⊂ CP n ; this is open since its preimage under
π is open in Cn+1 \ 0. By the assumption on z1 , z2 there are j 6= k
such that [z1 ] ∈ Uj and [z2 ] ∈ Uk , but z1j = z2k = 0. Thus z1 ∈ Aj,k and
z2 ∈ Ak,j . Clearly Aj,k ∩ Ak,j = ∅ so this suffices.
We have shown that CP n is a topological manifold of dimension 2n.
To show that it is compact we let S 2n+1 ⊂ Cn+1 be the unit sphere in
R2n+2 (with the natural identification between R2n+2 andP
Cn+1 ), and
define τ : Cn+1 → S 2n+1 by τ (z) = z/|z|, where |z| = ( j |z j |2 )1/2 .
Writing π̂ for the restriction of π to S 2n+1 , we see that π = π̂ ◦ τ . In
particular, CP n is a quotient space of S 2n+1 via the map τ̂ . Because
S 2n+1 is compact, it follows that CP n is as well.
Finally, we check that A = {(Uj , ϕj ) | j = 1, . . . , n + 1} is a smooth
n
atlas on CP n . If j < k, the transition map ϕk ◦ ϕ−1
j : ϕj (Uj ∩ Uk ) → C
is given by
1
n
1
k−1
ϕk ◦ ϕ−1
, 1, wk+1 , . . . , wn ]
j (w , . . . , w ) = ϕk [w , . . . , w
1
wj−1 wj+1
wk−1 1 wk+1
wn+1
w
=
,..., j , j ,..., j , j, j ,..., j
.
wj
w
w
w
w
w
w
Math 7350
Selected HW solutions
Page 5 of 30
Thus every (complex) coordinate function of ϕk ◦ ϕ−1
is of the form
j
w`
j
j
j
w 7→ wj for some `. Writing w = x + iy , we see that
w`
x` + iy `
(x` + iy ` )(xj − iy j )
x` xj + y ` y j + i(y ` xj − y j x` )
=
=
=
,
wj
xj + iy j
(xj )2 + (y j )2
(xj )2 + (y j )2
so every (real) coordinate function of ϕk ◦ ϕ−1
j is of the form
x` xj + y ` y j
(x, y) 7→ j 2
(x ) + (y j )2
y ` xj − y j x`
or (x, y) 7→ j 2
(x ) + (y j )2
for some `. These are smooth as long as (xj , y j ) 6= (0, 0), which holds
2n
on ϕj (Uj ), so ϕk ◦ ϕ−1
j is smooth as a map on R .
HW 2, # 1. More on Grassmanians
Let V be a n-dimensional real vector space and recall that given an
integer 1 ≤ k ≤ n, Gk (V ) is the Grassman manifold whose elements
are all the k-dimensional subspaces of V .
(a) We have seen that Gk (V ) is a smooth manifold for each k. Prove
that it is compact.
Solution. Fix a basis for V , so we work with Gk (Rn ). Each S ∈
Gk (Rn ) is determined by a set of k orthonormal vectors in Rn .
Writing these as columns of an n×k matrix gives A ∈ Mn×k (R)
with At A = Ik . Let X be the set of such matrices. Then X is
a closed and bounded subset of Rnk , hence X is compact. Let
π : X → Gk (Rn ) be the map that assigns to each A ∈ X the
subspace spanned by its columns. Then π is surjective.
We claim that π is continuous. To this end we look at its
coordinate representation. Recall that a chart for Gk (Rn ) is
given by fixing a decomposition Rn = P ⊕ Q, where dim P = k,
and using the bijection between UQ = {S ∈ Gk (Rn ) | S ∩ Q =
{0}} and the set of linear functions from P to Q. Let RP
be projection onto P along Q, and RQ the projection onto Q
along P . Then the linear map L : P → Q associated to π(A) ∈
Gk (Rn ) is uniquely determined by the condition that L(RP v) =
RQ v for every column v of the matrix A. Now it is easy to
Math 7350
Selected HW solutions
Page 6 of 30
see that varying A continuously means varying the columns
v continuously, which in turn varies the map L continuously.
Thus π is continuous.
(b) Prove that Gk (V ) and Gn−k (V ) are diffeomorphic.
Solution. Fix an inner product on V and let F : Gk (V ) →
Gn−k (V ) be the map that takes a subspace S to its orthogonal
complement S ⊥ . Clearly F is a bijection, we claim that it is
smooth. (This is enough since its inverse is of the same form.)
To this end, let V = P ⊕Q be an orthogonal decomposition of
V and let UQ be as above. Note that if S ∈ UQ then V = Q⊕S,
so we have V = Q⊥ ⊕ S ⊥ , hence F (S) = S ⊥ ∈ UQ⊥ . Thus we
write F in local coordinates given by the charts UQ , UQ⊥ .
Let L : P → Q be linear and let S ∈ Gk (V ) be its graph.
We want to find F̂ (L) : P ⊥ → Q⊥ . Given v ∈ P ⊥ , the image
F̂ (L)(v) ∈ Q⊥ is determined by the condition that v + F̂ (L)v ∈
S ⊥ ; that is,
hv + F̂ (L)v, w + Lwi = 0 for all w ∈ P.
Expanding the inner product gives
hv, wi + hv, Lwi + hF̂ (L)v, wi + hF̂ (L)v, Lwi = 0.
The first term always vanishes because v ∈ P ⊥ and w ∈ P .
Similarly for the last term (with Q⊥ and Q). Thus we have
hF̂ (L)v, wi = −hv, Lwi
for all v ∈ P ⊥ and w ∈ P . This means that once we fix bases,
F̂ (L) is represented by the matrix −At , where A is the matrix
representing L. Thus F̂ maps A to −At and is smooth.
HW 2, # 3. (Lee, Problem 2-9). Let p be a non-zero polynomial in one
variable with complex coefficients. Show that there is a unique continuous map p̃ : CP 1 → CP 1 such that the following diagram commutes,
Math 7350
Selected HW solutions
Page 7 of 30
where G is as in the previous problem.
C
/
G
p
CP 1
C
G
/
p̃
CP 1
Show that the map p̃ is smooth. Is it a diffeomorphism?
Solution. Recall that G(z) = [z, 1] = {(w1 , w2 ) ∈ C2 | w1 = zw2 }. In
order for the diagram to commute, we must have
p̃([z, 1]) = p̃(G(z)) = G(p(z)) = [p(z), 1]
1
w
for all z ∈ C. Whenever w2 6= 0 we have [w1 , w2 ] = [ w
2 , 1] and so
1 w
p̃([w1 , w2 ]) = p
,1 .
w2
This defines p̃ on CP 1 \ {[1, 0]}. Note that p̃ is smooth on this set
because its coordinate representation is p, which is a polynomial and
hence analytic.
In order to extend p̃ to all of CP 1 , we need to use a chart containing
[1, 0]. Such a chart is given by the inverse of the map F : C → CP 1
defined by F (z) = [1, z].
To find the coordinate representation of p̃ with respect to the chart
F −1 , we write p(z) = a0 + a1 z + · · · + an z n for some a0 , . . . , an ∈ C,
and observe that given z ∈ C \ {0} for which p(1/z) 6= 0, we have
1
−1
−1
−1
F ◦ p̃ ◦ F (z) = F (p̃([1, z])) = F
p
,1
z
1
= 1/p(1/z) =
−1
a0 + a1 z + · · · + an z −n
zn
=
.
a0 z n + a1 z n−1 + · · · + an
If p(z) ≡ a0 is a constant polynomial, then we have p̃([0, 1]) = [a0 , 1],
otherwise we have p̃([0, 1]) = [0, 1]. In the first case p̃ is a constant
function and therefore smooth. In the second, there is a neighbourhood
Math 7350
Selected HW solutions
Page 8 of 30
U ⊂ C of 0 such that p(1/z) 6= 0 for all z ∈ U \ {0}, and in particular,
the formula above shows that p̃ is smooth on this neighbourhood, hence
smooth on CP 1 . Note that p̃ is a diffeomorphism if and only if p has
degree 1 (and the linear coefficient is non-zero); for all other p, tha map
p itself is already non-injective.
HW 2, # 5. Tori as quotients by lattices
Let v, w ∈ R2 be independent (hence a basis), and let Λ = vZ + wZ =
{av + bw | a, b ∈ Z}. We say that Λ ⊂ R2 is a lattice. The lattice Λ
induces an equivalence relation on R2 by putting x ∼ y iff x − y ∈ Λ.
Let MΛ = R2 /Λ be the topological space obtained as the quotient of
R2 by this equivalence relation.
(a) Fix a lattice Λ and let π : R2 → MΛ be the quotient map. Given
p ∈ R2 and r ∈ (0, 12 ), let Ûpr = Br (p) ⊂ R2 , and show that π|Ûpr
is a bijection onto its image Upr ⊂ MΛ . Let ϕrp = π|−1
: Upr → Ûpr .
Û r
p
Show that the collection A = {(Upr , ϕrp ) | p ∈ R2 , 0 < r < 21 }
satisfies the conditions of the smooth manifold chart lemma, so
MΛ is a smooth manifold with smooth structure generated by
this atlas.
Solution. As observed in class, the condition r < 1/2 needs to
be replaced by r < r0 , where r0 depends on Λ.
Let r0 be such that x ∈ Λ \ {0} implies kxk > 2r0 . Then
given r ∈ (0, r0 ) and p ∈ R2 , we observe that x, y ∈ Br (p)
implies that kx − yk ≤ 2r0 , and hence by the definition of r0 ,
we have x − y ∈
/ Λ, so x 6∼ y. This implies that π(x) 6= π(y), so
π|Ûpr is 1-1.
Now we check the conditions of the smooth manifold chart
lemma. We just showed that ϕrp is a bijection between Upr and
the open set Br (p) ⊂ R2 , which verifies (i). For (ii), first observe
that Upr = Upr0 for all p0 ∼ p. Given Upr and Uqs , let x ∈ Λ be such
s
that kp − (q + x)k is minimised. Then Upr ∩ Uqs = Upr ∩ Uq+x
=
r
r
s
π(Br (p) ∩ Bs (q + x)). We get ϕp (Up ∩ Uq ) = Br (p) ∩ Bs (q + x)
Math 7350
Selected HW solutions
Page 9 of 30
and ϕsq (Upr ∩ Uqs ) = Br (p − x) ∩ Bs (q), both of which are open
in R2 .
Condition (iii) follows because the transition map ϕrp ◦ (ϕsq )−1
is a translation by x, where x is as in the previous paragraph.
Condition (iv) follows by choosing p to have rational coefficients
and r to be rational. Condition (v) follows since given any
distinct points [p], [q] ∈ M/Λ, we can choose r such that Br (p0 )∩
Br (q 0 ) = ∅ for all p0 ∼ p and q 0 ∼ q.
(b) Let Λ1 and Λ2 be any two lattices in R2 , and show that MΛ1
and MΛ2 are diffeomorphic (when equipped with the smooth
structure from the previous part). Hint: Start by finding a
smooth map F : R2 → R2 such that F (Λ1 ) = Λ2 .
Solution. Let Λ1 be generated by v, w ∈ R2 and Λ2 be generated by x, y ∈ R2 . Let F : R2 → R2 be the linear map taking
v 7→ x and w 7→ y. Then F is smooth and F (Λ1 ) = Λ2 . Note
that F is invertible and F −1 is also linear.
Given p ∈ R2 we have p + Λ1 ∈ R2 /Λ1 , and we define
F̃ : R2 /Λ1 → R2 /Λ2 by
F̃ (p + Λ1 ) = F (p) + Λ2 .
This is well-defined because F is linear and F (Λ1 ) = Λ2 . It is
bijective because we can define its inverse by
F̃ −1 (q + Λ2 ) = F −1 (q) + Λ1 .
It only remains to show that both F̃ and F̃ −1 are smooth. With
r ∈ (0, r0 ) as in the previous part, we can write the coordinate
representation F̂ relative to (Upr , ϕrp ) and (UFr (p) , ϕrF (p) ), where
the first chart is in R2 /Λ1 , and the second in R2 /Λ2 . We get
F̂ (p) = ϕrF (p) ◦ F̃ ◦ (ϕrp )−1 (p) = ϕrF (p) (F̃ (p + Λ1 ))
= ϕrF (p) (F (p) + Λ2 ) = F (p),
that is, the coordinate representation of F̃ is the original linear
map F , which is smooth. The same argument shows that F̃ −1
is smooth, so F̃ is a diffeomorphism.
Math 7350
Selected HW solutions
Page 10 of 30
(c) Let Λ = Z2 be the lattice generated by the standard basis
vectors, and show that MΛ is diffeomorphic to the torus T2 =
S 1 × S 1 with its standard smooth structure.
Solution. Define a map p : R2 → T2 by p(x, y) = (e2πix , e2πiy ).
Then (x0 , y 0 ) ∈ (x, y) + Λ implies that p(x0 , y 0 ) = p(x, y), and so
p passes to a map p̃ : MΛ → T2 . Moreover, p̃ is a bijection, as
we observed in the proof that T2 is homeomorphic to the square
with opposite edges identified.
We must show that p̃ and its inverse are smooth. S 1 is covered
by four charts, each of which is the intersection of S 1 with a halfplane, and the corresponding coordinate maps are z 7→ Re(z)
and z 7→ Im(z). Direct products of these charts give 16 charts
that cover T2 , all with the same form of coordinate maps. Thus
the coordinate representations of p̃ have the form p̂(x, y) =
(cos 2πx, cos 2πy), and similarly with one or both cos replaced
by sin. All these functions are smooth, and the coordinate
representations of p̃−1 are the inverse trig functions on their
appropriate domains, which are also smooth.
HW 3, #1. Tangent space of a product manifold Let M1 , . . . , Mk
be smooth manifolds, and for each j, let πj : M1 × · · · × Mk → Mj
be the projection onto the Mj factor. Prove that for any point p =
(p1 , . . . , pk ) ∈ M1 × · · · × Mk , the map
α : Tp (M1 × · · · × Mk ) → Tp1 M1 ⊕ · · · ⊕ Tpk Mk
v 7→ (d(π1 )p (v), . . . , d(πk )p (v))
is an isomorphism.
Solution. The map α is a direct sum
Q of the linear
L maps d(πi )p , hence
it
is
linear.
Moreover,
because
T
(
M
)
and
Tpi Mi have dimension
p
i
P
ni , in order to show that α is an isomorphism it suffices to show
that it is onto. (This turns out to be easier than showing 1-1.)
Math 7350
Selected HW solutions
Page 11 of 30
L
Q
We prove surjectivity by exhibiting a linear
map
β
:
T
M
→
T
(
Mi )
p
i
p
i
L
such that Q
α ◦ β is the identity on
Tpi Mi . Given pi ∈ Mi , let
τj : Mj → i Mi be given by
τj (x) = (p1 , . . . pj−1 , x, pj+1 , . . . pk ).
Define β by β(v1 , . . . , vk ) = d(τ1 )p1 (v1 ) + · · · + d(τk )pk (vk ). Then β is
linear since each d(τi )pi is linear, and moreover we have
M
α ◦ β(v1 , . . . , vk ) =
d(πj )p (β(v1 , . . . , vk ))
j
=
MX
=
MX
j
j
i
i
d(πj )p ◦ d(τi )pi (vi )
d(πj ◦ τi )pi (vi ) =
M
vj ,
j
where the last equality uses the fact that πj ◦ τi is the identity if i = j
and a constant function otherwise. Thus α ◦ β = IdLi Tpi Mi .
We remark that there is also the following alternate solution that uses
local coordinates.
LetQ(Ui , ϕi ) be charts for Mi around pi . Then
Q
U =
Ui and ϕ =
ϕi gives a chart for M around p. Writing
ni
1
xi , . . . , xi : Ui → R for the coordinate functions of ϕi , we see that the
coordinate functions of ϕ are
x̃11 , . . . , x̃n1 1 , x̃12 , . . . , x̃n2 2 , . . . , x̃1k , . . . , x̃nk k ,
where x̃ji = xji ◦πi (note that we
Qmust compose with πi to get a function
U → R.) Thus a basis for Tp ( Mi ) is given by
∂ .
∂ x̃ji p i,j
To show that α is an isomorphism it suffices to show that
∂ ∂
d(π` )p
=
if ` = i and 0 otherwise,
j
∂ x̃i p
∂xji
Q
L
since then α takes the basis for Tp ( Mi ) to a basis for
Tpi Mi . We
compute d(π` )p ( ∂∂x̃j |p ) by observing that for any f ∈ C ∞ (M` ), we have
i
d(π` )p
∂ ∂ ∂ĝ
(f ) =
(f ◦ π` ) =
(p̂),
j
j
∂ x̃i p
∂ x̃i p
∂xji
Math 7350
Selected HW solutions
Page 12 of 30
where g = f ◦ P
π` ∈ C ∞ (M ) and ĝ = g ◦ ϕ−1 ∈ C ∞ (Û ). (Recall that
Û = ϕ(U ) ⊂ R ni .) But we also have
∂ĝ
∂(f ◦ π` ◦ ϕ−1 )
∂(f ◦ ϕ−1
` ◦ π̂` )
(p̂) =
(p̂)
j (p̂) =
j
∂xi
∂xi
∂xji
P
where π̂` : R ni → Rn` is projection onto the n` coordinates corresponding to xj` for j = 1, . . . , n` . The final quantity is equal to 0 if
` 6= i, and ∂x∂ j |pi (f ) if ` = i. This proves that α maps a basis for
i
Q
L
Tp ( Mi ) onto a basis for
Tpi Mi , hence it is an isomorphism.
HW 3, # 2. (Lee, Problem 3-4). A trivial tangent bundle
Show that T S 1 is diffeomorphic to S 1 × R.
Remark: You may find it interesting to consider whether or not the
same is true for S 2 . Be warned that we do not yet have the machinery
in this course to answer this question.
Solution. First recall that for any smooth manifold MF
, if (U, ϕ) is a
chart on M then (Ũ , ϕ̃) is a chart on T M , where Ũ = p∈U Tp U and
ϕ̃ : Ũ → Û × Rn is given by ϕ̃(v) = (π(v), v 1 , . . . , v n ), where v j = v(xj )
so that v = v j ∂x∂ j |π(v) . (π : T M → M is the canonical submersion.)
The maps ϕ̃ : Ũ → Û × Rn and ϕ × Id : U × Rn → Û × Rn are both
diffeomorphisms, thus GU : Ũ → U × Rn given by GU = (ϕ−1 × Id) ◦ ϕ̃
is a diffeomorphism.
In light of the previous paragraph, it is natural to try to define a
diffeomorphism G : T M → M × Rn by fixing a smooth atlas A on M
and then for each (U, ϕ) ∈ A, putting G(v) = GU (v) for v ∈ Ũ . The
problem is that in general we have no reason to expect that GU |U ∩V =
GV |U ∩V when (U, ϕ) and (V, ψ) are two overlapping charts in A.
Math 7350
Selected HW solutions
Page 13 of 30
Writing τ : U × Rn → U for projection to the first part of the ordered
pair, we see that τ (GU (v)) = π(v) for every v ∈ Ũ , which does not
depend on U . So the compatibility problems we may encounter have
to do with the coordinates that different charts induce on the tangent
spaces.
The special thing about M = S 1 is that we can choose charts where
these coordinates all agree. With S 1 ⊂ C as the unit circle, let U =
S 1 \ {−1} and let ϕ : U → (−π, π) be defined by the condition that
ϕ−1 (x) = eix . Similarly, let V = S 1 \ {1} and let ψ : V → (0, 2π) be
defined by ψ −1 (x) = eix . Let GU : Ũ → U × R and GV : Ṽ → V × R
be as described above. (It is an easy exercise to check that ϕ, ψ are
compatible with the usual smooth structure on S 1 .)
∂
Note that given p ∈ U , every v ∈ Tp S 1 can be expressed as v = v 1 ∂x
,
1
1
1
where v = v(x) ∈ R. Thus GU (v) = (p, v ) ∈ U ×R ⊂ S ×R. Writing
∂
x̃ for the coordinate function relative to V , we similarly have v = ṽ 1 ∂x
for v ∈ Tp S 1 when p ∈ V . The key is that the transition map between
U and V is given by
(
x
x ∈ (0, π),
x̃(x) =
x + 2π x ∈ (−π, 0).
Thus for every p ∈ U ∩ V and v ∈ Tp S 1 , we have v(x) = v(x̃), hence
v 1 = ṽ 1 . In particular, GU = GV on Ũ ∩ Ṽ , so this gives a well-defined
bijection G : T S 1 → S 1 × R. Note that the coordinate representations
of G are the maps (ϕ × Id) ◦ GU ◦ ϕ̃−1 , but each of these is just the
identity map on Û × Rn , and hence is smooth. Similarly, the coordinate representation of G−1 is the identity, hence smooth, so G is a
diffeomorphism.
HW 3, # 4. Quotient manifolds
Let G be a group and E a smooth manifold. A left action of G on E
is a map G × E → E, often written as (g, p) 7→ g.p, that satisfies
g1 .(g2 .p) = (g1 g2 ).p for all g1 , g2 ∈ G, p ∈ E,
e.p = p for all p ∈ E.
Math 7350
Selected HW solutions
Page 14 of 30
Suppose we are given a left action of G on E such that for every g ∈ G,
the map p 7→ g.p is a smooth map from E to itself. This induces an
equivalence relation on E by putting x ∼ y iff there is g ∈ G such that
g.x = y.
We say that the action is “free and proper” (see p.548–549 of Lee) if
the following are true:
(i) for every x ∈ E there is a neighbourhood U of x such that
g.U ∩ U = ∅ for every g 6= e;
(ii) for every x, y ∈ E with x 6∼ y there are neighbourhoods U of x
and V of y such that g.U ∩ V = ∅ for every g ∈ G.
Write M = E/G for the quotient space of E by the relation ∼.
(a) Prove that if the action is free and proper, then M is a topological manifold.
(b) Let π : E → M be the quotient map. Show that π is a covering
map. (This means that for every
F x ∈ M there is a neighbourhood U 3 x such that π −1 (U ) = α∈A Vα for some disjoint open
sets Vα ⊂ E such that π|Vα : Vα → U is a homeomorphism.)
(c) Prove that if E is a smooth manifold, then M has a unique
smooth structure such that π is a smooth covering map. (“Smooth
covering map” means that ‘homeomorphism’ is replaced by ‘diffeomorphism’ in the definition of covering map.)
Solution. To show that M is a topological manifold, we first observe
that quotients of second countable spaces are themselves second countable, so it suffices to check Hausdorff and locally Euclidean.
The Hausdorff property will follow from (ii) in a moment; first we
show that π is an open map. SIndeed, given any U ⊂ E we have
π(U ) = π(G.U ), where G.U = g∈U g.U . Note that for every g ∈ G,
the map p 7→ g.p is invertible with inverse q 7→ g −1 .q, hence p 7→ g.p is
Math 7350
Selected HW solutions
Page 15 of 30
a diffeomorphism from E to itself; thus if U is open, then g.U is open
for every g ∈ G, so G.U is also open. Because G.U is saturated with
respect to π, it follows from the definition of the quotient topology that
π(U ) = π(G.U ) is open for every open U ⊂ E, so π is an open map.
Now given [x] 6= [y] ∈ M , where x, y ∈ E and we write [x] = G.x =
{g.x | g ∈ G} for the equivalence class of x, then we have x 6∼ y
and so by (ii) there are neighbourhoods U 3 x and V 3 y such that
g.U ∩ V = ∅ for every g ∈ G. Since π is an open map, the sets
[U ] = π(U ) and [V ] = π(V ) are open in M ; since [x] ∈ [U ] and
[y] ∈ [V ], to check Hausdorff it suffices to show that [U ] ∩ [V ] = ∅.
Suppose [z] ∈ [U ] ∩ [V ]. Then there are g, h ∈ G such that g.z ∈ U
and h.z ∈ V . But then h−1 g.z ∈ h−1 g.U ∩ V , contradicting our choice
of U, V . This shows that M is Hausdorff.
To show that M is locally Euclidean, we start by proving that π is
a covering map. Given any [x] ∈ M , by (i) there is a neighbourhood
US
3 x such that g.U ∩U = ∅ for every g 6= e. Note that [US
] = π(G.U ) =
π( g∈G g.U ) and that G.U is saturated, so π −1 [U ] = g∈G g.U . To
show that U is evenly covered it suffices to show that the union is
disjoint and that π|g.U is a homeomorphism onto its image for every g.
First we observe that if z ∈ g.U ∩ h.U for some g 6= h ∈ G, then
h−1 z ∈ h−1 g.U ∩ U , but h−1 g 6= e, contradicting (i). Thus the union
is disjoint. Moreover, if π(y) = π(z) for some y, z ∈ g.U , then there is
h ∈ G such that z = h.y, hence z ∈ hg.U ∩ g.U , so g −1 z ∈ g −1 hg.U ∩ U ,
so g −1 hg = e, so h = e. In particular, π|g.U is 1-1. Since π is continuous
and open, this shows that πg.U is a homeomorphism onto its image, thus
U is evenly covered.
Now we use the fact that π is a covering map to show that M is a
topological manifold. Given [x] ∈ M , let U 3 x be a neighbourhood as
above, so that π|U is a homeomorphism from U ⊂ E to [U ] = π(U ) ⊂
M . Because E is a topological manifold, there is a neighbourhood
V 3 x and a homeomorphism ϕ : V → V̂ ⊂ Rn . Thus ϕ̃ := ϕ ◦ π|−1
U is
a homeomorphism from [V ] ∩ [U ] to an open subset of Rn . This shows
that M is locally Euclidean, hence a topological manifold (we already
showed Hausdorff and second countable).
Math 7350
Selected HW solutions
Page 16 of 30
Finally, we show that there is a unique smooth structure on M such
that π is a smooth covering map. Observe that if there is such a smooth
structure, then because each chart ϕ on E is a diffeomorphism onto its
image, each of the maps ϕ ◦ π|−1
U from the previous paragraph is also a
diffeomorphism onto its image, so any smooth structure on M with π
a smooth covering map must be compatible with the atlas defined in
the previous paragraph. It only remains to show that the charts from
this atlas are all smoothly compatible with each other, so that we have
existence of such a smooth structure.
Let ([U ], ϕ̃) and ([V ], ψ̃) be any two such charts on M . That is,
[U ], [V ] ⊂ M are evenly covered, with U, V ⊂ E open; moreover,
n
ϕ̃ = ϕ ◦ π|−1
U for a smooth chart ϕ : U → R , and similarly for ψ̃.
Note that we may assume without loss of generality that π|U ∩V maps
U ∩ V homeomorphically to [U ] ∩ [V ] (a priori we may have U ∩ V = ∅
even when [U ]∩[V ] 6= ∅, but we can replace V with g.V for some g ∈ G
to get the desired property).
−1
−1
Now we have ψ̃ ◦ ϕ̃−1 = (ψ ◦ π|−1
U ∩V ) ◦ (π|U ∩V ◦ ϕ ) = ψ ◦ ϕ , which is
smooth since ϕ, ψ come from a smooth atlas for E. This shows that the
atlas we defined on M is smooth, thus M has a smooth structure such
that π is a smooth covering map. We showed above that this structure
is uniquely determined by the smooth structure on E.
HW 4, # 1. Let S, S̃ be compact surfaces without boundary, and
suppose that ρ : S̃ → S is a covering map with degree n. Prove that
χ(S̃) = nχ(S).
You may use without proof the following result: Given any open cover
U of a surface S, there is a triangulation T of S such that every triangle
in T is completely contained in some element U ∈ U.
Math 7350
Selected HW solutions
Page 17 of 30
Solution. Because ρ is a covering map of degree n, every point x ∈ S
has a neighbourhood Ux 3 x such that ρ−1 (Ux ) is a disjoint union of
open sets Vx1 , . . . , Vxn ⊂ S̃ with the property that ρ|Vxi is a homeomorphism from Vxi to Ux .
Let U = {Ux | x ∈ S}. By the result stated in the problem, there is a
triangulation T of S such that every triangle is completely contained
in some Ux .
Formally we defined T as a collection of triangles in R2 together with
an equivalence relation on the edges, such that the quotient space is
the surface S. We may think of the triangles as being subsets of S (we
identify a triangle with its image under the quotient map), and we will
do this from now on; indeed, this is implicit in the formulation of the
result in the previous paragraph (every triangle is completely contained
in some Ux ).
Let T be a triangle in T , and let x be such that T ⊂ Ux . Then ρ−1 (T )
is a disjoint union of n triangles in S̃. Denote the collection of all such
triangles in S̃ by T̃ . Note that the intersection of any two triangles
T1 , T2 ∈ T̃ is of the form ρ|−1
(ρ(T1 ) ∩ ρ(T2 )); since ρ(T1 ) and ρ(T2 )
Vxi
are triangles in T and ρ|Vxi is a homeomorphism Vxi → Ux , we see that
T1 ∩ T2 is a union of vertices and edges. Thus T̃ is a triangulation of
S̃.
We showed above that the number of faces in T̃ is n times the number
of faces in T . The same is true for vertices and edges, because each
edge and each vertex in T is contained in some Ux , which is evenly
covered by ρ. Thus we have
χ(S̃) = #faces in T̃ − #edges in T̃ + #vertices in T̃
= n(#faces in T ) − n(#edges in T ) + n(#vertices in T )
= nχ(S).
Math 7350
Selected HW solutions
Page 18 of 30
HW 4, # 2. Let Sk be the sphere with k handles. Give a necessary
and sufficient condition on k, ` ∈ N for the existence of a covering map
ρ : Sk → S` .
Hint: Use the previous problem to determine a natural necessary condition. Then given k, ` satisfying this condition, describe a particular
realization of Sk as a surface in R3 that is symmetric under rotation
by 2π/(k − 1) around the z-axis. Then for a suitable value of n, rotation by 2π/n around the z-axis will induce an equivalence relation on
Sk , whose quotient space is S` , and whose quotient map is the desired
covering map ρ.
Solution. From the previous problem we know that if there is a covering map Sk → S` then χ(Sk ) = nχ(S` ) for some n ∈ N. Recall from
lecture that χ(Sk ) = 2 − 2k, so if a covering map exists then we have
2 − 2k = n(2 − 2`), or in other words,
k−1
∈ N.
`−1
We claim that this necessary condition is also sufficient. It suffices to
check the case when ` 6= k, since every surface covers itself (by the
identity map). Note that if k = 0 or 1 then the condition can only be
satisfied for ` = k. Thus it suffices to consider the case when k > 1.
n=
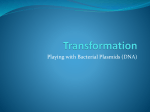
Consider the realization of Sk in R3 sketched in the figure (for k = 5),
where we start with the torus (S1 ) as a surface of revolution and then
add the remaining k − 1 handles evenly spaced around the outside of
the torus. We attach the handles symmetrically so that the surface is
symmetric under rotation around the z-axis by 2π/(k − 1).
Math 7350
Selected HW solutions
Page 19 of 30
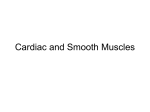
Now let n = k−1
and let G be the finite cyclic group with n elements.
`−1
Let G act on Sk by rotation; that is, if g is a generator for g then
g m acts by rotation by 2πm/n around the z-axis. Note that this is a
diffeomorphism from Sk to itself and that this gives a smooth group
action that is free and proper; a typical orbit of the action is shown
below. The figure also shows how a fundamental domain for the quotient Sk /G can be selected; cut Sk into a ‘wedge’ of angle 2π/n, and
then glue the two boundary circles together to get S` .
Note that because the quotient map is by a free and proper group
action, we know from the previous assignment that it is a smooth
covering map.
HW 4, # 3. Consider the function f (x, y) = sin(4πx) cos(6πy) on the
torus T2 = R2 /Z2 .
(a) Prove that this is a Morse function (every critical point is nondegenerate) and calculate the number of minima, saddles, and
maxima.
(b) Describe the evolution of the sublevel sets f −1 ((−∞), c)) as c
varies from the lowest minimum value to the highest maximum
value.
Math 7350
Selected HW solutions
Page 20 of 30
Solution. A straightforward computation shows that
∂f
= 4π cos(4πx) cos(6πy),
∂x
∂f
= −6π sin(4πx) sin(6πy),
∂y
and since cos t, sin t never vanish simultaneously, we see that (x, y) ∈ R2
is a critical point of f : R2 → R if and only if one of the following two
conditions holds:
cos(4πx) = sin(6πy) = 0,
sin(4πx) = cos(6πy) = 0.
The first condition is satisfied iff x = (2n + 1)/8 and y = m/6 for some
n, m ∈ Z; the second is satisfied iff x = n/4 and y = (2m + 1)/12 for
some n, m ∈ Z.
Note that each critical point on the torus corresponds to a critical point
in [0, 1)2 (since this is a fundamental domain for the torus), and so the
set of critical points is A ∪ B, where
A = { 81 , 38 , 85 , 87 } × {0, 16 , 13 , 12 , 23 , 56 },
1 3 5 7 9 11
, 12 , 12 , 12 , 12 , 12 }.
B = {0, 41 , 21 , 34 } × { 12
Another computation gives
∂ 2f
= −16π 2 sin(4πx) cos(6πy),
∂x2
∂ 2f
= −24π 2 cos(4πx) sin(6πy),
∂x∂y
∂ 2f
= −36π 2 sin(4πx) cos(6πy),
∂y 2
so the Hessian determinant is
2
2
2
2
2
576π sin (4πx) cos (6πy) − cos (4πx) sin (6πy) .
If (x, y) ∈ A then the second term in brackets vanishes, and the first is
positive, so the determinant is positive; thus every critical point in A
is non-degenerate and is either a maximum or a minimum. Similarly,
if (x, y) ∈ B then the first term vanishes and the second is positive,
so the determinant is negative; thus every critical point in B is nondegenerate and is a saddle.
Math 7350
Selected HW solutions
Page 21 of 30
We have shown that f is a Morse function and that it has 24 saddles,
and 24 other critical points that are either minima or maxima (the
points in A). Note that if (x, y) ∈ A then each of sin(4πx) and cos(6πy)
is either ±1, so f (x, y) is either ±1; there are 12 elements of A with
f = −1, which are minima, and 12 with f = 1, which are maxima.
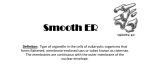
Now we consider the sublevel sets Sc = f −1 ((−∞, c)). For c < 1 this is
empty; for c ∈ (−1, 0) it is the union of 12 disjoint discs (geometrically
these are ellipses). As c increases the discs grow, until at c = 0 they
become rectangles which touch at the corners; these corners are the 24
saddle points. For c ∈ (0, 1) the sublevel set is a torus with 12 discs
removed, and these discs are filled in as c increases past 1, so that
Sc = T2 for c > 1. These sublevel sets are shown in the figure.
c = − 32
c = − 13
c=0
c=
1
3
c=
2
3
Notice that because there is more than one saddle with f = 0, passing
from c = −ε to c = ε does not correspond to gluing on a single pair of
pants; rather, it corresponds to gluing on some kind of very complicated
set of pants with lots of legs. More precisely, a regular pair of pants is
the sphere with 3 discs removed. The “very complicated set of pants
with lots of legs” that we encounter here (that is, Sε \ S−ε ) is a torus
with 24 discs removed.
HW 5, #2. Lee, Problem 4-4. Let γ : R → T2 be the curve given by
γ(t) = (e2πit , e2πiαt ), where α is any irrational number. Use Lemma
4.21 to show that the image set γ(R) is dense in T2 .
Math 7350
Selected HW solutions
Page 22 of 30
Solution. Given ε > 0, Lemma 4.21 guarantees the existence of m, n ∈
Z such that |mα − n| < ε. Let β = mα − n and note that
e2πimα = e2πi(mα−n) = e2πiβ .
Given any open set V ⊂ S 1 there is (a, b) ⊂ R such that
{e2πix | x ∈ (a, b)} ⊂ V.
Taking ε = b − a and letting m, n, β be as above, we have |β| < ε and
it follows that there is k ∈ Z such that kβ ∈ (a, b). In particular, we
have
e2πikmα = e2πikβ ∈ V.
Now we turn our attention to the curve γ : R → T2 . Recall that {U ×V |
U, V ⊂ S 1 are open} is a basis for the topology on T2 . In particular,
given any open U, V ⊂ S 1 we can choose s ∈ R such that e2πis ∈ U
and then use the above argument to find k ∈ Z such that
e2πikmα ∈ e−2πisα V = {e−2πisα z | z ∈ V }.
Then e2πi(s+km)α ∈ V , and we note that e2πikm = 1, so
γ(s + km) = (e2πi(s+km) , e2πi(s+km)α ) = (e2πis , e2πisα e2πikmα ) ∈ U × V.
This holds for arbitrary U, V , so γ(R) is dense in T2 .
HW 6, #1. Lee, Problem 5-4. Let β : (−π, π) → R2 be the smooth
curve given by β(t) = (sin 2t, sin t). (See Example 4.19.) Show that
the image of this curve is not an embedded submanifold of R2 . Be
careful: this is not the same as showing that β is not an embedding!
Solution. Let S be the image of the curve. Let U be a small nbhd of 0
in R2 , so S ∩ U is open in S (with the subspace topology). Whenever U
is small enough, (S ∩U )\0 has four connected components. Thus S ∩U
cannot be homeomorphic to any open ball in Rn , because an open ball
with a point removed has two connected components if n = 1, and only
one otherwise. Thus S with the subspace topology is not a topological
mfd.
Math 7350
Selected HW solutions
Page 23 of 30
HW 6, #4. Lee, Problem 5-18(a). Suppose M is a smooth manifold
and S ⊂ M is a smooth submanifold. Show that S is embedded if and
only if every f ∈ C ∞ (S) has a smooth extension to a neighbourhood
of S in M .
Solution. (⇒). Suppose S is embedded; we prove every f ∈ C ∞ (S)
can be extended to F ∈ C ∞ (U ) for some open U ⊃ S. Since S is
embedded it satisfies the local k-slice condition, so given any p ∈ S
there is a slice chart (Up , ϕp ) with p ∈ Up . Given f ∈ C ∞ (S) and
p ∈ S, let fp ∈ C ∞ (Up ) be the function whose coordinate representation
relative to (Up , ϕp ) is
fˆp (x1 , . . . , xn ) = fˆ(x1 , . . . , xk ).
S
Note that fp |S∩Up = f |S∩Up . Let U = p Up so that U is an open
submanifold of M . Let {ψp }p∈S be a partition of unity subordinate to
the open cover (Up )p∈S of U . Then the product ψp fp gives a smooth
function supported in Up , which we can take to be defined on U by
setting it equal to zero outside of Up . Define F : U → R by F =
P
the sum is finite at every point,
p∈S ψp fp . Then F is smooth since
P
P
and for all q ∈ S we have F (q) = p ψp (q)fp (q) = p ψp f (q) = f (q).
(⇐). Suppose every f ∈ C ∞ (S) has a smooth extension to a neighbourhood of S in M . We show that S is embedded by verifying the local
k-slice condition. Given p ∈ S there is a nbhd V 3 p in S (with respect
to the topology making S an immersed submfd) such that ι : V → M
is an embedding. (This is a general property of immersions.) In particular, there is a chart U around p in which V ∩ U is a k-slice.
Let f ∈ C ∞ (S) be a bump function supported in V , with f (p) > 0. By
the hypothesis there is an open (in M ) set W ⊃ S and F ∈ C ∞ (W )
such that F |S = f . Because F is continuous, W 0 := {q ∈ W | F (q) >
0} is an open set. Moreover, W 0 ∩ S ⊂ supp(f ) ⊂ V . Restricting the
chart U to U ∩ W 0 , we see that U ∩ W 0 ∩ S ⊂ U ∩ W 0 ∩ V is a k-slice.
Math 7350
Selected HW solutions
Page 24 of 30
HW 6, #5. Lee, Problem 5-20. Show by giving a counterexample that
the conclusion of Proposition 5.37 may be false if S is merely immersed.
That is, give an example of a smooth immersed submanifold S ⊂ M
and p ∈ S for which Tp S does not coincide with {v ∈ Tp M | vf =
0 whenever f ∈ C ∞ (M ) and f |S = 0}.
Solution. Here is one example: let S ⊂ R2 be the ‘figure eight’
from #1 of this homework assignment. Let S̃ be the same set with the
topology and smooth structure corresponding to β̃(t) = (− sin 2t, sin t).
Then T0 S ⊂ R2 is the line spanned by (2, 1), while T0 S̃ is the line
spanned by (−2, 1). Let v, ṽ be the derivations on C ∞ (R2 ) corresponding to directional derivatives in these two directions. Note that both
v, ṽ annihilate any f ∈ C ∞ (R2 ) with f |S = 0, but only one of them
can be contained in T0 S.
Another example is the line with irrational slope on the torus. Let S
be this submanifold and note that Tp S is one-dimensional. But any
smooth function vanishing on S must vanish on T2 since S is dense,
and so vf = 0 for every v ∈ Tp T2 .
HW 7, #1. Lee, Problem 5-6. Suppose M ⊂ Rn is an embedded mdimensional submanifold, and let U M ⊂ T Rn be the set of all unit
tangent vectors to M :
U M := {(x, v) ∈ T Rn | x ∈ M, v ∈ Tx M, |v| = 1}.
It is called the unit tangent bundle of M . Prove that U M is an embedded (2m − 1)-dimensional submanifold of T Rn ≈ Rn × Rn .
Math 7350
Selected HW solutions
Page 25 of 30
Solution. Because M is embedded it satisfies the local m-slice condition: for every x ∈ M there is a chart (U, ϕ) around x with ϕ(U ∩M ) =
{x ∈ ϕ(U ) | xm+1 = · · · = xn = 0}. Let (Ũ , ϕ̃) be the associated chart
for T Rn ≈ Rn × Rn , so Ũ = π −1 (U ), and note that ϕ̃(Ũ ∩ T M ) =
{(x, v) ∈ Rn × Rn | xm+1 = · · · = xn = 0, v m+1 = · · · = v n = 0}, so
T M satisfies the local 2m-slice condition. This shows that T M is a
2m-dimensional embedded submanifold of R2n .
Now
the function f : R2n → R defined by f (x, v) = |v|2 =
Pn consider
i 2
i=1 (v ) . Note that f is smooth, hence f restricts to a smooth function T M → R. Moreover, U M = f −1 (1), so to show that U M is an
embedded submanifold of T M (and hence also of R2n ), it suffices to
show that f |T M has rank 1 at every (x, v) ∈ U M .
To this end, it is enough to produce a curve γ : (−ε, ε) → T M with
γ(0) = (x, v) such that df(x,v) γ 0 (0) 6= 0. Let γ(t) = (x, (1 + t)v), then
df(x,v) γ 0 (0)(Id) = (f ◦ γ)0 (0) = dtd |(1 + t)v|2 |t=0 = 2. This shows that
f |T M has rank 1 at every (x, v) ∈ U M , hence U M is a codimension 1
embedded submanifold of T M , which completes the proof.
HW 7, #3. Lee, Problem 7-1. Show that for any Lie group G, the
multiplication map m : G × G → G is a smooth submersion. Hint: use
local sections
Solution. Given g ∈ G, define a map σg : G → G × G by σg (h) =
(hg −1 , g), so that m ◦ σg (h) = hg −1 g = h. Thus σg is a smooth section
of m. Given any (h, g) ∈ G × G, we have σg (hg) = (hgg −1 , g) = (h, g),
so (h, g) is in the image of the smooth section σg . This shows that m
is a smooth submersion.
Math 7350
Selected HW solutions
Page 26 of 30
HW 7, #5. Lee, Problem 7-11. Considering S 2n+1 as the unit sphere
in Cn+1 , define an action of S 1 on S 2n+1 , called the Hopf action, by
z · (w1 , . . . , wn+1 ) = (zw1 , . . . , zwn+1 ).
Show that this action is smooth and its orbits are disjoint unit circles
in Cn+1 whose union is S 2n+1 .
Solution. Given any z, the map (w1 , . . . , wn+1 ) 7→ (zw1 , . . . , zwn+1 )
is smooth because multiplication is smooth, and the orbits form a partition of S 2n+1 by basic properties of group actions. The only real task
is to show that every orbit is a unit circle. To this end we observe that
given (w1 , . . . , wn+1 ) ∈ S 2n+1 ⊂ Cn+1 , the map F : C → Cn+1 given by
F (z) = (zw1 , . . . , zwn+1 ) is linear and 1-1, so its image is a subspace
of Cn+1 with real dimension 2. The orbit of (w1 , . . . , wn+1 ) is the intersection of that image with S 2n+1 ; that is, it is the intersection of a
plane with S 2n+1 , which is a unit circle.
HW 8, #2. Lee, Problem 8-21. Prove that up to isomorphism, there
are exactly one 1-dimensional Lie algebra and two 2-dimensional Lie
algebras. Show that all three of these algebras are isomorphic to Lie
subalgebras of gl(2, R).
Solution. Let g be a one-dimensional Lie algebra and let q ∈ g be
nonzero. Define a linear map f : g → gl(2, R) by f (cq) = ( 0c 00 ). Note
that [q, q] = −[q, q] = 0 by anti-symmetry and hence [cq, c0 q] = 0 for
all c, c0 ∈ R by bi-linearity. Thus g is abelian and f is a Lie algebra
homomorphism. The image of f is a 1-dimensional subspace of gl(2, R)
in which all matrices commute, hence f is a Lie algebra isomorphism
onto its image ( R0 00 ), so all 1-dimensional Lie algebras are abelian and
are isomorphic to this one.
Math 7350
Selected HW solutions
Page 27 of 30
Now suppose g is a two-dimensional abelian Lie algebra. Let v, w ∈ g
be linearly independent and define f : g → gl(2, R) by f (v) = ( 10 00 )
and f (w) = ( 00 01 ). Let h be the image of f , then h is a two-dimensional
abelian Lie subalgebra of gl(2, R) and f : g → h is a Lie algebra isomorphism. Thus every two-dimensional abelian Lie algebra is isomorphic
to h, the Lie algebra of diagonal matrices in gl(2, R).
Finally, suppose g is a two-dimensional non-abelian Lie algebra. Then
there are v, w ∈ g such that [v, w] 6= 0. As above, this implies that v, w
are linearly independent. Thus they form a basis for g. Let u = [v, w]
and note that one of the sets {u, v} and {u, w} is linearly independent
(otherwise v, w are scalar multiples of each other). Without loss of generality assume u, v are linearly independent, hence a basis. Moreover,
writing u = av + bw we have [u, v] = [av + bw, v] = b[w, v] = −bu.
Let x = −v/b (note that b 6= 0 since g is non-abelian), then [u, x] =
−b−1 [u, v] = u. Define f : g → gl(2, R) by f (u) = ( 00 10 ) and f (v) =
( 00 01 ), and note that [f (u), f (v)] = f (u) = f ([u, v]) so f is a Lie algebra
homomorphism. In particular it is a Lie algebra isomorphism between
g and h := f (g) since f is 1-1. Thus every two-dimensional non-abelian
Lie algebra is isomorphic to h = {( 00 ab ) | a, b ∈ R}.
HW 8, #3. Lee, Problem 8-28. Considering det : GL(n, R) → R∗ as
a Lie group homomorphism, show that its induced Lie algebra homomorphism is Tr : gl(n, R) → R. Hint: see Problem 7-4, which was #4
from the last assignment.
Solution. Recall that gl(n, R) = M (n, R) with the commutator bracket.
This is identified with TIn GL(n, R) by identifying A ∈ gl(n, R) with the
tangent vector at t = 0 to the curve γA (t) = In + tA, which is contained in GL(n, R) for sufficiently small values of t. Then TIn GL(n, R)
is identified with the space of left-invariant vector fields on GL(n, R) by
Math 7350
Selected HW solutions
Page 28 of 30
associating to v ∈ TIn GL(n, R) the left-invariant vector field (v L )X =
d(LX )In (v) it generates (here X ∈ GL(n, R)).
Similarly, the space of left-invariant vector fields on R∗ is identified
with T1 R∗ by associating v ∈ T1 R∗ with (v L )x = d(Lx )In (v). In the
canonical chart on R∗ , where Tx R∗ is identified with R via the basis
∂
, this gives (v L )x = xv for x ∈ R∗ and v ∈ R.
∂x
Up to the identification of left-invariant vector fields with their representatives at the identity, the Lie algebra homomorphism induced
by det is, by definition, the linear map TIn GL(n, R) → T1 R∗ given
by d(det)In . It was shown on the last assignment that d(det)In (A) =
Tr(A). Thus trace is the Lie algebra homomorphism induced by determinant.
HW 9, #1. Let V be a finite-dimensional vector space. Recall that
given two tensors ω ∈ T k V ∗ and η ∈ T ` V ∗ , the tensor product ω ⊗ η ∈
T k+` V ∗ is defined by
ω ⊗ η(v1 , . . . , vk , vk+1 , . . . , vk+` ) = ω(v1 , . . . , vk )η(vk+1 , . . . , vk+` ).
1
1
Let det ∈ T 2 (R2 )∗ be the 2-tensor defined by det(v, w) = det vv2 w
=
w2
1 2
2 1
i
i
1 2
v w −v w , where v = v Ei and w = w Ei . Recall that if (e , e ) is the
standard basis for (R2 )∗ , then det = e1 ⊗ e2 − e2 ⊗ e1 . Determine (with
proof) whether or not there are 1-tensors (covectors) ω, η ∈ T 1 (R2 )∗ =
(R2 )∗ such that det = ω ⊗ η.
Solution. If det = ω ⊗ η then we would have
0 = det(E1 , E1 ) = ω(E1 )η(E1 ),
0 = det(E2 , E2 ) = ω(E2 )η(E2 ).
Since det 6= 0 we have ω 6= 0 and η 6= 0, hence either ω(E1 ) = η(E2 ) = 0
or ω(E2 ) = η(E1 ) = 0. But then we either have det(E1 , E2 ) = 0 or
det(E2 , E1 ) = 0, a contradiction.
Math 7350
Selected HW solutions
Page 29 of 30
HW 9, #2. Let (e1 , e2 , e3 ) be the standard dual basis for (R3 )∗ . Show
that e1 ⊗ e2 ⊗ e3 is not equal to a sum of an alternating tensor and a
symmetric tensor.
Solution. Suppose ω, η ∈ T 3 (R3 )∗ are alternating and symmetric,
respectively. Then since (1, 2, 3) 7→ (2, 3, 1) is an even permutation we
have
ω(E1 , E2 , E3 ) = ω(E2 , E3 , E1 ),
η(E1 , E2 , E3 ) = η(E2 , E3 , E1 ),
and hence the same symmetry holds for ω+η. The result follows observing that (e1 ⊗e2 ⊗e3 )(E1 , E2 , E3 ) = 1 but (e1 ⊗e2 ⊗e3 )(E2 , E3 , E1 ) = 0.
HW 9, #4. Let ω 1 , . . . , ω k be covectors on a finite-dimensional vector
space V .
(a) Lee, Problem 14-1. Show that ω 1 , . . . , ω k are linearly dependent
if and only if ω 1 ∧ · · · ∧ ω k = 0.
Solution. (⇒). Without loss of generality suppose ω 1 =
Pk
i
i=2 ai ω for some ai ∈ R. Then
1
k
ω ∧ ··· ∧ ω =
k
X
i=2
ai ω i ∧ ω 2 ∧ · · · ∧ ω k = 0
because each term has a repeated ω i .
(⇐). Suppose ω 1 , . . . , ω k are linearly independent, then they
extend to a basis ω 1 , . . . , ω n for V ∗ . Let v1 , . . . , vn be the basis for V that is dual to this. (Formally, take the dual basis
Math 7350
Selected HW solutions
Page 30 of 30
for (V ∗ )∗ corresponding to {ω i }, then use the canonical isomorphism between V and (V ∗ )∗ .) Then (ω 1 ∧· · ·∧ω n )(v1 , . . . , vn ) =
1, hence ω 1 ∧ · · · ∧ ω n 6= 0, hence ω 1 ∧ · · · ∧ ω k 6= 0.
(b) Suppose ω 1 , . . . , ω k are linearly independent, and so is the collection of covectors η 1 , . . . , η k ∈ V ∗ . Prove that span(ω 1 , . . . , ω k ) =
span(η 1 , . . . , η k ) if and only if there is some nonzero real number
c such that ω 1 ∧ · · · ∧ ω k = c η 1 ∧ · · · ∧ η k .
Solution. (⇒). Since the spans are the same there are aij ∈ R
such that ω i = aij η j for every i. Then we get
ω 1 ∧ · · · ∧ ω k = (a1j1 η j1 ) ∧ · · · ∧ (akjk η jk ) = AJ η J
where for a multiindex J = (j1 , . . . , jk ) we write AJ = a1j1 · · · akjk
and η J = η j1 ∧ · · · ejk , and the sum is over all multi-indices (not
just increasing ones). Note that the wedge product vanishes
whenever J contains a repeated index, so this is actually a sum
over all permutations, and if J is a permutation of {1, . . . , k}
then the wedge product is a scalar multiple of η 1 ∧ · · · ∧ η k . It
follows that ω 1 ∧ · · · ∧ ω k = cη 1 ∧ · · · ∧ η k for some c ∈ R, and
we observe that c 6= 0 since ω 1 , . . . , ω k are linearly independent
hence the left hand side is not 0, by (a).
(⇐). Suppose c ∈ R\0 is such that ω 1 ∧· · ·∧ω k = cη 1 ∧· · ·∧η k .
Then for every i we have
ω 1 ∧ · · · ∧ ω k ∧ η i = cη 1 ∧ · · · ∧ η k ∧ η i = 0
where the last equality is because η i is repeated. By part (a) we
conclude that {ω 1 , . . . , ω k , η i } is linearly dependent. Since the
ω j are linearly independent this implies that η i ∈ span{ω 1 , . . . , ω k }.
This holds for all i, hence span{η 1 , . . . , η k } ⊂ span{ω 1 , . . . , ω k }.
The reverse inclusion is similar.