Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electric machine wikipedia , lookup
Switched-mode power supply wikipedia , lookup
History of electric power transmission wikipedia , lookup
Three-phase electric power wikipedia , lookup
Electrification wikipedia , lookup
Alternating current wikipedia , lookup
Mains electricity wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Voltage optimisation wikipedia , lookup
Rectiverter wikipedia , lookup
Electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
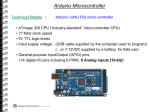
3. Mobile Robot Overview Mobile robots are made up of a number of functional components as illustrated in the diagram below. These include, a control system, sensors, a power system, usually some type of communications and a drive systems for platform movement and object manipulation. The specific design of these components is affected by the intended use of the robot. In our case we will be working with a small general-purpose robot supporting a basic set of operations, which we will modify for specific applications. One of the first issues to be resolved in the design/selection of a robot is the choice of platform. 3.1 Platform Configurations There are a wide variety of mobile robot platform confiurations available, depending on the intended purpose, functional requirements and cost limitations. Engineering decisions are also affected by the availability and current state of the art of various technologies. Scienfiic or technical breakthroughs in any pertinent area can have a dramatic effect on the overall design. For example consider the emergence of solar powered unmanned arial vechcles (UAVs) such as NASA's Helios (part of the Pathfinder Program) as a result of improvements in the efficiency of solar-voltaic cell technology. Tracked Wheeled Legged Winged The simplest mobile robot platform for smooth terrain is the wheeled vehicle and the simplest (and most maneuverable) wheeled platform is the differential-drive. In addition, this configuration expends less energy for turning than a tracked vechicle. SPaRC-1 Differential Drive Pivot Steering - A simple version of pivot steering is shown below. The red spots indicate fixed pivot points fastened to the platform body or frame. When the darker gray rod is moved from side to side the wheels are turned about the fixed pivots. This steering produces a situation in which one or both of the wheels must slip against the ground as the platform turns. This is because both wheels are turned through the same angle but the radius of curvature for the wheel on the inside of the turn should be less than the radius of curvature for the outer wheel. A more sophisticated pivot steering that provides the proper compenstion for the two wheels is called Ackerman steering. This is rather complicated to implement and is not typically used on toy cars or small robot platforms. In any case the rear drive wheels will also have to slip unless a rear-end differenetial gear is provided. Servo Steering - A Third alternative for wheeled platforms is to separate the drive and steering functions by using a drive wheel as in pivot steering and a servo steering mechanism as shown on the right. In this case, the steering wheel is a caster whose direction is controlled with a servo. This servo steering wheel could be placed in the front of or the back of a threewheeled configuration. Legged Robots - A more complex but popular means of locomotion is walking. There are two categories of walking platforms: static walking and dynamic walking. In static walking the platform is stable at all times. (That is, the center of gravity is always inside the region defined by the points of contact with the ground.) In dynamic walking the balance of the robot depends on the timing and placement of the legs and feet. If the robot were to stop a some point in the walking it would tip over. (This is because the center of gravity falls outside the region defined by the points of contact with the ground). We will limit our designs to static walking for now. A typical leg must provide for two different directions of movement. The leg must be able to lift the foot and it must be able to propel the platform in some direction. A simple two-servo implementation of a leg is shown below. Side View Top View A common walking robot design uses six legs and therefore12 servos. Although there are applications that benefit from insect-like walking robots, there is an issue of power consuption when using so many servos. Keep in mind that servos under load consume power even when they are stationary. 3.2 Drive Motors and Actuators The choice of drive motors is one of the most important decisions in the design of a mobile robot. For hobby robots we typically take what we can get by scavanging motors from surplus equipment such as floppy drives, computer printers or discarded VCRs. When we use surplus motors we usually do not have access to the motor specifications so we must guestimate the torque generated by the motor and its power requirements. Hopefully we will at least know the voltage required. There are three common types of motors available: standard DC motors, servos, and stepper motors. DC Motors - Small DC motors can be obtained from hobby shops, scavanged from motorized toys or purchased from surplus electronics stores. Many of the motors found in discarded computer equipment are stepper motors. You can distinguish a stepper motor from a regular DC motor by the number of wires. Stepper motors have between four and eight wires while DC motor have only two. Also stepper motor shafts do not turn smoothly but have a "bumpy" feel as they are rotated by hand. We will discuss stepper motors in detail in a later section. Assuming you know the proper voltage for your DC motor you can test it by applying the source voltage to the two wires. Note the direction of rotation and speed, then reverse the polarity of the applied voltage. Verify that the motor turns in the opposite direction. Most DC motors turn much too fast to be useful in robotics applications. You will probably need to slow down the rate of rotation through a reducing gear box. You will save much time and trouble by finding DC motors with reducing gear boxes already attached. You will probably want a shaft rotation rate between 60 and 180 RPM. The primary problem to be solved is how to control the motors with a computer or other digital interface. You cannot simply connect your motor to the output pins of your processor since most motor voltage and current requirements exceed the limits of the standard digital output. One common method for controlling DC motors is through the use of an H-bridge circuit. In the circuit shown above, the motor can be powered with either polarity. Setting one of the control lines to high activates two of the transistors allowing +V to be applied to one side of the motor while grounding the other side. The polarity reverses when the other control line is brought high. The diodes are included to limit any noise spikes from the motor reaching the processor connected to the control lines. By circuit design or by careful programming you must be sure not to let both control lines be set high at the same time. To make the motor turn more slowly, you can send a pulsed signal to one of the control lines. The percentage of time that the signal is high sets the speed of the motor. The greater the percentage of time the signal is high the faster the speed of the motor. It is important to realize that you should not attempt to control the speed of a DC motor by reducing the supply voltage. This will result in a larger percentage of the power being dissipated as heat in the motor windings. Servos - Another common drive mechanism for robots is the servo motor or just servo. This device is made up of a small electric motor, gear box, and associated circuitry to control the motor. A servo has three lines: power, ground and signal. Some external source is used to apply a PWM (pulse width modulated) voltage to the signal line. To control the servo a square wave pulse must be applied to the signal line at least every 20 mS (up to 5mS period is OK). The width of the pulse should be between 1.0 mS and 2.0 mS. The output shaft of the servo (usually connected to a lever arm or wheel) will move to some position between -90 degrees and +90 degrees from the center point. As long as a particular PWM signal is applied the servo will hold at a specific location. Servos can be hacked to turn continuously in either direction. The necessary modifications vary with servo manufacturer and some servos are much easier to hack than others. You should understand that hacking a servo precludes your returning it in case it quits working. In addition, servos (especially inexpensive ones) are not designed for long term continuous use. Many use plastic gear boxes with no bearings and the electronics may overheat if run for long periods. Servos can be upgraded with bearing kits but the cost quickly exceeds that of standard DC motors with gear boxes and the necessary circuitry (H-bridge) for driving them. Stepper Motors - Stepper motors can be found in computer floppy disks (the seek head motor) and computer printers. These motors differ from regular motors in the manner in which they are powered. In order to make a stepper motor rotate you must apply a sequence of volatages to its input coils. A bipolar stepper motor has two drive coils and therefore four wires. The diagram below shows the order in which the supply voltage must be applied to create rotation. For clockwise rotation you must apply the voltage levels (white low, blue high) in the order phase 1,2,3,4. For counterclockwise rotation apply the voltages in reverse order. Most of the stepper motors found in surplus computer equipment are unipolar stepper motors. Unipolar stepper motors have four drive coils (essentially two bipolar stepper motors combined). Sometimes the common wires connected to the supply +V are brought out of the motor case as separate wires. In other designs they come out in common pairs. For this reason unipolar steper motors can have between five and eight wires. Although the process is somewhat complicated you can determine which wires are which by measuring the resistance between pair of wires and applying the supply voltage to test the relative positions of the drive shaft. Once the coils have been identified you will be able to drive the stepper motor by applying the supply voltage as shown in the diagram below. As shown in the circuit above we can control the application of the supply voltage using TTL compatible signals at Phase 1 through Phase 4 control lines. The NPN transistors (2N3055) can be used to drive the stepper motors used in floppy disks. There is a limit to the speed of a stepper motor. You will need to experiment to find this limit. An interesting difference between DC motors and stepper motors is that the torque of a stepper motor is highest at slower speeds while the torque of DC motors increases with speed. 3.3 Control System The computational aspects of robotics are emphasized in this course. For this reason we have selected a microprocessor that provides a memory space large enough to hold significant programs while supporting a large number of I/O control lines. The BasicX-24 includes 32K Bytes of memory for BASIC source code while providing 16 I/O lines. The BasicX-24 also supports a serial communications port (COM1) with speeds from 2400 baud to 460.8K baud and 300 baud to 19,200 baud on any of its 16 I/O pins (COM3). The processor includes floating point math, an on-chip clock/calendar, and on-chip multitasking. The developer board provided in the BasicX24 Kit provides connections and cabling for serial or parallel PC interfacing. The EEPROM is programmed/reprogrammed directly from a PC without the need for an addtional PROM Programmer. Introduction to BasicX-24 - In order to become familiar with the BasicX24 processor and its version of the BASIC language we will write and complile a few simple programs on the host PC, then transfer and run them on the BX-24. Assuming you are starting with the BX-24 Kit you will first need to install the BX-24 IDE on a host PC. Please refer to the BX-24 Application Note titled, Getting Started for more details. In order to write BX-24 programs you will need a PC with the following characteristics and supporting OS, Although BasicX is a stand-alone processor, software development requires a PC that meets the following minimum requirements: 1) MS Windows 95/98/NT 2) Pentium or higher processor 3) 16MB RAM, 32MB recommended 4) 10MB free hard disk space 5) CD-ROM drive 6) Available COM port (You must connect to COM 2 on Gateway Machines, since their COM 1 port is too noisy). As stated in the Application Note the BX-24 defaults to COM 1. If you are using a Gateway machine as your host PC you will need to select another COM port such as COM 2 and hope for the best. For several years, Gateway has produced PCs with COM ports so noisy as to be essentially useless. Their official response is that the problem that the peripheral device must be causing the problem, however serial port devices that work fine on every other type of PC do not work on Gateways. The COM 2 port is marginally usable on the Gateways we have tested with the BX-24 so good luck. The steps for connecting the BX-24 to the PC are listed in the Application Note as, 1) Connect DB-9 cable to unused PC COM port 2) Connect DB-9 cable to BX-24 COM port 3) Connect the wall transformer to the BX-24 4) The factory-loaded program starts blinking LEDs on BX-24 Please note that the factory-load program may no longer be in the BX-24 memory so step 4 may vary according to what has been previously loaded on your BX-24. This step installs the BasicX Downloader and Editor/Compiler on your computer. It is important to close all open programs before running Setup. If sharing violations still occur, press Ignore and continue Setup. Setup will prompt you to replace system files before continuing the installation. Examples assume D: as CD-ROM drive -- substitute appropriate drive letter for your system. 1) Close all running Windows programs 2) Remove any previous BasicX Installations (Start, Settings, Control Panel, Add/Remove Programs, BasicX, Add/Remove) 3) Insert BasicX CD into CD-ROM Drive (D: for example) 4) BasicX CD_SETUP screen automatically appears if autorun enabled If not, Run CD_SETUP.EXE: Start, Run, D:\CD_SETUP.EXE, OK 5) Choose "Install BasicX Development Software" from menu 6) Choose "Install BasicX" 7) Follow prompts for Installing BasicX to computer a) If prompted, replace some system files and restart Windows After restart, proceed from Step 1 again b) If prompted, keep newer files and replace older files c) If prompted, Ignore sharing violations and continue setup Hello World Program - HelloWorld is a simple BasicX program that uses built-in queue and serial port functions to write to the BasicX Status Window. The program first opens two queues to be used as data buffers for the serial port. Then it opens the port and attaches the two queues to the port. Finally, it enters a loop in which the string "Hello, world" is transmitted repeatedly, followed by carriage return/linefeed. A call to the built-in Delay procedure inserts a one second delay after each string. Follow the steps below as provided by the Application Note to build and implement your first BX-24 BASIC program: 1) Start BasicX Program: Start, Programs, BasicX, BasicX Express... 2) Options menu -- verify that BX-24 is checked. 3) Download Port -- open the COM port. 4) Monitor Port -- open the same port as in step (3) above. 5) Editor button -- press. 6) The Open - Project File dialog box will pop up. Type HelloWorld as a filename. Program will ask if you want to create a new file -- hit Yes. This boilerplate code is automatically created in the editor window: Sub Main() End Sub 7) Project - Chip menu. Verify all boxes in the "IN" columns are checked (this means all input pins are initialized as input-tristate). Click on OK. 8) Enter the following code into the Edit Window (or cut and paste): Sub Main() Do Debug.Print "Hello, world" Call Delay(1.0) Loop End Sub 9) Hit F5 to compile and run. Say "Yes" when compiler asks to save changes. 10) "Hello, world" will print on screen until stopped by reset button a) If not working, verify connections and port addresses and retry. b) If still not working, supply 5 VDC to 12 VDC power directly to BasicX power terminals and retry. c) Try the Download Port - Rescue menu choice, then download the program again. The output of the BX-24 statement Debug.Print "Hello, world" is sent back to the host PC and will be displayed in the IDE window. Once you have successfully executed this HelloWorld program, write another program of your own and test it on the BX-24. Once you have become familiar with the BX-24 IDE begin reviewing the BX-24 Language Reference Manual and the System Library to learn the features of the BX-24 BASIC langauge.