Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
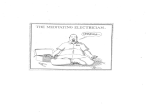
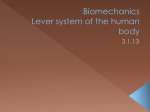
www.EngageEngineering.org Using Everyday Examples in Engineering (E3) Biomechanics and Hand Weights J. Kadlowec and S. Farrell Rowan University Objectives 1. Introduction to arm as a third class lever 2. Determine force in the bicep muscle when statically holding a weight 3. Investigate the difference in forces when holding the weight in various positions Introduction As humans move, lift, walk and run many or their muscle and bone systems of the body act as levers. There are three classes of levers as shown in Figure 1. Figure 1: Classes of Levers [1] The third class lever is the most common in the body, but less common for certain engineering applications. To show why this is, suppose the doorknob on a door was located close to the hinges of the door. More force would be required to open the door this way, than when the doorknob is located further from the hinge. Torque is the product of a lever arm (the distance between the locations of the force and hinge) and the applied force. When the lever arm is small (i.e. the doorknob is close to the hinge), a large force is needed to open the door. Conversely, when the lever arm is large (i.e. the doorknob is far from the hinge), a smaller force will open the door. While the mechanical advantage is less than one, this arrangement as a third class lever allows small amounts of muscle contraction to cause larger and faster motion of the extremities. This material is based upon work supported by the National Science Foundation (NSF) under Grant No. 083306. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of NSF. 1 Muscles group generally occurs in pairs. One group produces motion in one direction around a joint, and the other group produces motion in the opposite direction. As shown in Figure 1, rotation of the forearm around the elbow joint is a good illustration of this concept. While the triceps rotates forearm away from the upper arm (extension), the biceps rotates the forearm in the direction toward the upper arm (flexion). Try this on yourself while feeling the action of upper arm muscles with your other hand. As you perform this experiment, you will take measurements of lengths. You will then use engineering principles of statics to determine the force in your bicep in order to hold a weight. Statics You will perform a static analysis of your forearm when holding a weight in two positions. The first position is when your arm is parallel to the floor, then second is when your arm is at a 45degree angle relative to the floor. You will determine the force in the bicep muscle when holding the weight in these positions. Sum of the moments equals zero for static equilibrium (1) Figure 2: Key Graphic for the Experiement (adapted from [1]) 2 Experimental plan: Determine how much weight your arm can hold at 90 degrees compared to flexed at another angle. Start with static equilibrium, the force of your bicep muscles (F1) pulling up on your lower arm times the distance (d1) from your elbow to the bicep muscle is equal to the downward force of the weight (F2) in your arm can hold with your arm times the length (d2) from your elbow to the location of the weight. Mathematically, this equation is given by F1 d1 = F 2 d2 (2) Step 1. Hold the weight in your hand with your arm flexed at 90 degrees as in Figure 2. Placing your arm on a desk or table will help. Using the tape measure, determine the length in inches the length of your forearm from the humerus (back of the elbow) and including part of the palm of your hand to where you are holding the dumbbell weight: d2 = ___________ (inches) Step 2. The insertion point of the bicep muscle is the place where the bicep muscle attaches to the forearm. Approximate the distance from the humerus (back of the elbow) to location of bicep insertion point on the forearm as 1/8 of the forearm length. d1 = ___________ (inches) Step 3. Determine F2, which is just the weight of a dumbbell weight (for example 5 pounds). Step 4. Solve Eqn. 2 to determine the upward force on your bicep, F1. F1 = _________________ = __________. Step 5. Holding the weight, bend your arm to an angle like the picture shown: Photo Credit: “Bicep Curl” by sportsandsocial, available under a Creative Commons Attribution 2.0 Generic License Does the weight feel lighter or heavier? _____________________ 3 Step 6. Now, calculate how much weight you could lift with the same force your arm applied in the first set of weight lifting, say the 5 pounds (F1 from Step 4). To keep things simple, the good news is that you already have the values of F1 and d1, because these have not changed from the first part of the experiment. To calculate the new value of d2, measure from the end of your elbow to the point on the desk directly below the weight. (d2 should be much smaller than in the first trial). d2 = ___________ (inches) Step 7. Calculate F2 (how much weight you could hold with the same effort) F1 d1 = F 2 d2 And again, we must rearrange the equation algebraically to solve for the unknown: F2 = =____________ = __________ This value is how much more weight you could hold at the new angle compared to 5 pounds with your arm at 90 degrees, parallel to the floor. References [1] Cameron J, Skofronick J and Grant R., Physics of the Body, 2nd Edition, Medical Physics Publishing, Madison, WI, 1999 Acknowledgements: National Science Foundation (NSF 0087683). Students Bob Erney, Joshua Forman, Amanda Simermeyer, and Dhruvkumar Vyas © 2011 J. Kadlowec and S. Farrell. All rights reserved. Copies may be downloaded from www.EngageEngineering.org. This material may be reproduced for educational purposes. 4