Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
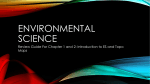
http://www.cs.ndsu.nodak.edu/~datasurg Contact Person: Dr. William Perrizo Department of Computer Science North Dakota State University 258 A10 IACC Building 1301 12 th Ave North Fargo, ND 58102, USA Voice: +1 701 231 7248 Fax: +1 701 231 8255 Email: [email protected] http://www.cs.ndsu.nodak.edu/~perrizo SMART-TV: AN EFFICIENT AND SCALABLE NEAREST NEIGHBORS BASED CLASSIFIER Contents Introduction 2 Problem Statement 2 P-tree Vertical Data Structure 3 Vertical Set Squared Distance 3 Graph of Total Variations 5 Proposed Algorithm 5 Performance Results 10 Summary 12 Reference 12 1200 1000 800 600 400 200 60 50 40 40 30 20 20 0 10 Introduction Recent advances in computer power, network, information storage, and multimedia have lead to a proliferation of stored data in various domains like bioinformatics, image analysis, World Wide Web, networking, banking, and retailing. This explosive growth of data has opened the need for developing efficient and scalable data mining techniques that can extract valuable and interesting information from large volume of data. Classification is one of the data mining functionality that involves predicting the class label of newly encountered objects using feature attributes of a set of preclassified objects. The predictive pattern from the classification result can be used to understand the existing objects in the database and to understand how new objects are grouped. The main goal of classification is to determine the data membership of the unclassified objects. 0 Problem Statement K-nearest neighbor (KNN) classifier is one of the methods used for classification. KNN classifier is the most commonly used neighborhood classification due to its simplicity and good performance. The classifier does not build a model in advance like decision tree induction, Neural Network, and Support Vector Machine. Instead, it invests all the effort for classification until a new object arrives, and thus, the classification decision is made locally based on the features of the new objects. For each new object, KNN classifier searches for the most similar objects in the training set and assigns a class label to the new object based on the plurality of category of the k-nearest neighbors. The notion of similarity or closeness between the training objects and the unclassified object is determined using a distance measure, e.g. Euclidian distance. KNN classifier has shown good performance on various datasets. However, when the training set is very large, i.e. millions of objects, a brute force search to find the k-nearest neighbors will increase the classification time significantly. Such approach will not scale to very large datasets. Most of the state-of-the-art classification algorithms use the traditional horizontal row based structuring to represent the data. The use of traditional horizontal record based and sequential scan-based approach are known to scale poorly to very large data repositories. Jim Gray from Microsoft in his talk at SIGMOD 2004 conference [3] emphasized that 2 vertical column based structuring as opposed to horizontal row based structuring is a good alternative to speed up query process and ensure scalability. P-tree Vertical Data Structure Vertical data representation represents and processes the data differently from horizontal data representation. In vertical data representation, the data is structured column-bycolumn and processed horizontally through logical operation like AND or OR, while in horizontal data representation, the data is structured row-by-row and processed vertically through scanning or using some indexes. P-tree vertical data structure is one choice of vertical data representation [6]. P-tree is a lossless, compressed, and data-mining ready data structure. P-tree is lossless because the vertical bit-wise partitioning guarantees that the original data values can be retained completely. P-tree is compressed because when the segments of bit sequences are either pure-1 or pure-0, they can be represented in a single bit. P-tree is data-mining ready because it addresses the curse of cardinality or the curse of scalability, one of the major issues in data mining. P-tree vertical data structure has been intensively exploited in various domains and data mining algorithms, ranging from classification [1][2][4], clustering [5], association rule mining [7], and outlier analysis [8]. In September 2005, Ptree technology was patented in the United States by North Dakota State University, patent number 6,941,303. Vertical Set Squared Distance Let R(A1, A2, …, Ad) be a relation in d-dimensional space. A numerical value v of attribute Ai can be written in b bits binary representation to be: vib1 vi 0 0 2 j b 1 j vij , where vij can either be 0 or 1 Now, let x be a vector in d-dimensional space. The binary representation of x in b bits can be written as: x ( x1(b1) x10 , x2(b1) x20 , , xd (b1) xd 0 ) Let X be a set of vectors in R or X be the relation R itself, xX, and a be the input vector. The total variation of X about a, denoted as TV(X, a), measures the cumulative squared separation of the vectors in X about a, which can be computed quickly and scalably using the Vertical Set Squared Distance (VSSD) formula, derived as follows: d 2 TV ( X , a) ( X a) ( X a) x a x a xi ai xX xX i 1 d d d xi2 2 xi ai ai2 xX i 1 i 1 i 1 3 d d d x 2 xi ai ai2 xX i 1 2 i xX i 1 xX i 1 T1 2T2 T3 d T1 0 2 j xij i 1 j b 1 d xi2 xX i 1 2 xX d 0 0 2 j k xij xik i 1 j b1 k b1 xX Let PX be a P-tree mask of set X that can quickly identify data points in X. PX is a bit pattern containing 1s and 0s, where bit 1 indicates that a point at that bit position belongs to X, while 0 indicates otherwise. Using this mask, the above equation can be simplified x by substituting xX ij xik with COUNT ( PX Pij Pik ) , where COUNT is the aggregate operation that counts bit 1 in a given pattern and Pij is the P-tree at ith dimension and jth bit position. Thus, T1 can be simplified to be: 0 0 j k T1 2 COUNT ( PX Pij Pik ) i 1 j b1 k b1 d Similarly for terms T2 and T3, we get: T2 d 0 0 d xi ai ai 2 j xij ai 2 j COUNT ( PX Pij ) x X i 1 i 1 j b1 xX i 1 j b1 d d T3 ai COUNT ( PX ) ai2 xX i 1 2 d i 1 Therefore: d 0 0 TV ( X , a) ( X a) ( X a) 2 j k COUNT ( PX Pij Pik ) i 1 j b 1 k b 1 d 2 ai i 1 0 2 j b 1 j COUNT ( PX Pij ) d COUNT ( PX ) ai2 i 1 Let us consider X as the relation R itself. In this case, the mask PX can be removed since all objects now belong to R. The formula then can be rewritten as: 4 d 0 0 0 j k TV ( X , a) 2 COUNT ( Pij Pik ) 2 ai 2 j COUNT ( Pij ) i 1 j b 1 k b 1 i 1 j b 1 d d | X | a i 1 (7) 2 i where |X| is the cardinality of R. Furthermore, note that the COUNT operations are independent from a (the input value). For classification problem where X is the training set (or the relation R itself), this independency allows us to pre-compute the count values in advance, retain them, and use them repeatedly when computing total variations. The reusability of count values expedites the computation of total variation significantly. Graph of Total Variations Let us consider equally distributed data objects in a 2-dimensional space. The plot of the total variations of each object is illustrated in the following figure. The graph of the total variations is always minimized at the mean. 1200 1000 800 600 400 200 60 50 40 40 30 20 20 0 10 0 Figure 1. The hyper-parabolic graph of total variations. Proposed Algorithm The proposed algorithm finds the candidates of neighbors by forming a total variation contour around the total variation of the unclassified object. The objects within the contour are considered as the superset of nearest neighbors. These objects are identified efficiently using P-tree range query algorithm without the need to scan the total variation values. The proposed algorithm further prunes the neighbors set by means of dimensional 5 projections. After pruning, the k-nearest neighbors are searched from the set, and then, let them vote to determine the class label of the unclassified object. The algorithm consists of two phases: preprocessing and classifying. In the preprocessing phase, all steps are conducted only once, while in the classifying phase, the steps are repeated for every new unclassified object. Let R(A1,…,An, C) be a training space and X(A1,…,An) = R[A1,…,An] be the features subspace. TV(X, a) is the total variation of X about a, and let f (a) TV ( X , a) TV ( X , ) . Recall that: d 0 0 d d TV ( X , a) 2 j k COUNT ( Pij Pik ) 2 ai xi | X | ai2 i 1 j b 1 k b 1 i 1 xX i 1 d d 0 0 j k 2 COUNT ( Pij Pik ) 2 | X | ai i | X | ai2 i 1 j b 1 k b 1 i 1 i 1 d d d 0 0 j k 2 COUNT ( Pij Pik ) | X | 2 ai i ai2 i 1 j b 1 k b 1 i 1 i 1 d Since f (a) TV ( X , a) TV ( X , ) , we get: d d d d 2 | X | 2 ai i ai | X | 2 i i i2 i 1 i 1 i 1 i 1 d d | X | 2 ai i i i ai2 i2 i 1 i 1 d d d | X | ai2 2 i ai i2 i 1 i 1 i 1 | X | a 2 Letting g (a) ln( f (a)) ln X ln a ith dimension, the gradient of g at a = 2 and taking the first derivate of g(a) fixing at 2(a ) i g . Note that the gradient = 0 if (a) 2 a d a and only if a= and the gradient length depends only on the length of a - . Thus, the isobars are hyper-circles. The shape of the graph is a funnel as shown in Figure 2. 6 a Figure 2. The shape of graph g(a). Preprocessing Phase: 1. Obtain the count values needed for computing the total variation and store them. The complexity of this operation is O(db), where d is the number of dimensions and b is the bit width. 2. Compute g (x ) , x X and create derived P-trees of these values. The complexity of this computation is O(n) since the computation is done for all objects in X. Classifying Phase: The following steps are performed to classify each unclassified object. 1. Determine vector (a - ), where a is the unclassified object and is the vector mean of the feature space X. 2. Given an epsilon ( > 0), determine two vectors located in the lower and upper side of a by moving unit inward toward along vector (a - ) and moving unit outward away from a. Let b and c be the two vectors in lower and upper side of a respectively, then vector b and c can be determined as follows: b 1 a (a ) c 1 a (a ) 7 3. Calculate g(b) and g(c) such that g(b) g(a) g(c) and determine the interval [g(b), g(c)] that creates a total variation contour. The neighborhood mask within the interval can be created efficiently using P-tree range query algorithm without the need for scanning the total variation values. The mask is a bit pattern containing 1s and 0s, where bit 1 indicates that the object belongs to the neighborhood, while 0 indicates otherwise. The objects within the pre-image of this contour in the original feature space are the candidates of neighbors ( neighborhood of a, Nbrhd(a, )). g g(c) g(b) Y X -contour b ac Figure 3. The pre-image of the contour of interval [g(b), g(c)] creates a Nbrhd(a, ). 4. Prune the neighborhood using the dimensional projections. For each dimension, a dimensional projection contour is created around the unclassified object. The width of the contour is specified using the same epsilon previously used to determined vector p and q. It is important to note that because the training set is already converted into Ptrees vertical structure, no additional derived P-trees are needed to conduct the projection. The P-trees of each dimension can be used directly with no extra cost. A parameter, called MS (manageable size of candidate set), is needed for the pruning. This parameter specifies the upper bound of neighbors in the candidate set such that if the manageable size of neighbors is reached, the pruning process will be terminated, and the number of neighbors in the candidate set is considered small enough to be scanned to search for the k-nearest neighbors. The pruning technique consists of two major steps. First, it obtains the count of neighbors in the candidate set in each dimension. The rationale is to maintain the neighbors that are predominant (close to the unclassified object) in most dimensions so that when the Euclidian distance is measured (step 5 of the classifying phase), they 8 are the true closest neighbors. The process of obtaining the count starts from the first dimension. The dimensional projection contour around the unclassified object a is formed and the mask of this contour is created. The contour mask is then AND-ed with the mask of the pre-image of total variation contour (the candidate set), and the count is obtained. Note that at this point, no neighbors are pruned, only the count is obtained. The process continues for all dimensions, and at the end of the process, the counts are sorted in descending order. The second step of the pruning is to intersect the dimensional projection contour with the pre-image of total variation contour. The intersection starts based on the order of the count. The dimension with the highest count is intersected first, followed by the dimension with the second most count, and so forth. In each intersection, the number of neighbors in the pre-image of total variation contour (candidate set) is updated. In the implementation perspective, this intersection is simply ANDing the mask of total variation contour with the mask of the dimensional projection contour. The process continues until a manageable size of neighbors is reached or all dimensional projection contours have been intersected with the pre-image of total variation contour. g g(c) g(b ) Y -contour b ac X Projection on X dimension Projection on Y dimension Figure 4. Pruning the contour using dimensional projections. 5. Find the k-nearest neighbors from the remaining neighbors by measuring the d Euclidian distance x Nbrhd(a, ), d 2 ( x, a) = (x i 1 i ai ) 2 . 6. Let the k nearest neighbors vote using a weighted vote. 9 Experimental Results The experiments were conducted on an Intel Pentium 4 CPU 2.6 GHz machine with 3.8GB RAM, running Red Hat Linux version 2.4.20-8smp. Datasets Some of the datasets were taken from the Machine Learning repository at (http://www.ics.uci.edu/~mlearn/MLRepository.html). RSI dataset: This dataset is a set of aerial photographs from the Best Management Plot (BMP) of Oakes Irrigation Test Area (OITA) near Oakes, North Dakota, taken in 1998. The images contain three bands: red, green, and blue. Each band has values in the range of 0 and 255, which in binary can be represented using 8 bits. The corresponding synchronized data for soil moisture, soil nitrate, and crop yield were also used, and the crop yield was selected as the class attribute. Combining all the bands and synchronized data, a dataset with 6 dimensions (five feature attributes and one class attribute) was obtained. To simulate different classes, the crop yield was divided into four different categories: low yield having intensity between 0 and 63, medium low yield having intensity between 64 and 127, medium high yield having intensity between 128 and 191, and high yield having intensity between 192 and 255. Three synthetic datasets were generated to study the scalability and running time of the proposed algorithm. The cardinality of these datasets is varied from 32 to 96 million. KDDCUP 1999 dataset: This dataset is the network intrusion dataset used in KDDCUP 1999. The dataset contains more than 4.8 million samples from the TCP dump. Each sample identifies a type of network intrusion such as Normal, IP Sweep, Neptune, Port Sweep, Satan, and Smurf. Wisconsin Diagnostic Breast Cancer (WDBC): This dataset contains 569 diagnosed breast cancers with 30 real-valued features. The task is to predict two types of diagnoses as either Benign (B) or Malignant (M). OPTICS dataset: OPTICS dataset has eight different classes. The dataset contains 8,000 points in 2-dimensional space. Iris dataset: This is the Iris plants dataset, created by R.A. Fisher. The task is to classify iris plants into one of three iris plants varieties: Iris Setosa, Iris Versicolor, and Iris Virginica. Iris dataset contains 150 samples in a 4-dimensional space. 10 900 SMART-TV w/ P-Tree SMART-TV w/ Scan P-KNN with HOBit KNN Classification Time (Seconds/Sample) 800 700 600 500 400 300 200 100 0 0 32000000 64000000 Dataset Cardinality 96000000 Note: SMART-TV with scan uses a scanning approach to determine the superset of neighbors in the total variation contour. It is showed just for comparison. Figure 5. Trend of classification time on RSI dataset. Classification Time (Seconds/Sample) 300 250 200 Smart-TV with P-tree Smart-TV with Scan 150 P-KNN HOBBIT KNN 100 50 0 KDDCUP Dataset Figure 6. Classification time on KDDCUP dataset. 11 Table 1. Classification accuracy comparison on various datasets. Dataset KDDCUP OPTICS IRIS WDBC SMART-TV with P-tree 0.93 0.99 0.97 0.94 Classification Accuracy P-KNN P-KNN HOBBIT EIN 0.91 0.99 0.99 0.89 0.96 0.39 0.96 KNN 0.93 0.99 0.96 0.97 Summary SMART-TV is an efficient and scalable nearest neighbor based classification algorithm that employs P-tree vertical data structure. From the experimental results, we conclude that in terms of speed and scalability, SMART-TV is comparable to the other vertical nearest neighbor algorithms. In terms of classification accuracy, SMART-TV is comparable to that of KNN classifier. Reference [1] T. Abidin and W. Perrizo, “SMART-TV: A Fast and Scalable Nearest Neighbor Based Classifier for Data Mining,” Proceedings of the 21st ACM Symposium on Applied Computing (SAC-06), Dixon, France, April 23-27, 2006. [2] T. Abidin, A. Dong, H. Li, and W. Perrizo, “Efficient Image Classification on Vertically Decomposed Data,” Proceedings of the 1st IEEE International Workshop on Multimedia Databases and Data Management (MDDM-06), Atlanta, Georgia, April 8, 2006. [3] J. Gray, “The Next Database Revolution,” Proceedings of the 10th ACM SIGMOD, pp. 1-4, Paris, 2004. [4] M. Khan, Q. Ding, and W. Perrizo, “K-nearest Neighbor Classification on Spatial Data Stream Using P-trees,” Proceedings of the Pacific-Asia Conference on Knowledge Discovery and Data Mining, pp. 517-528, Taipei, Taiwan, May 2002. [5] A. Perera, T. Abidin, M. Serazi, G. Hamer, and W. Perrizo, “Vertical Set Squared Distance Based Clustering without Prior Knowledge of K,” Proceedings of the 14th International Conference on Intelligent and Adaptive Systems and Software Engineering (IASSE-05), pp. 72-77, Toronto, Canada, July 20-22, 2005. [6] W. Perrizo, “Peano Count Tree Technology Lab Notes,” Technical Report NDSU-CS-TR-01-1, North Dakota State University, Computer Science Department. http://www.cs.ndsu.nodak.edu/~perrizo/classes/785/pct.html, 2001. 12 [7] I. Rahal, D. Ren, and W. Perrizo, “A Scalable Vertical Model for Mining Association Rules,” Journal of Information & Knowledge Management (JIKM), Vol.3, No. 4, pp. 317-329, 2004. [8] D. Ren, B. Wang, and W. Perrizo, “RDF: A Density-Based Outlier Detection Method using Vertical Data Representation,” Proceedings of the 4th IEEE International Conference on Data Mining (ICDM-04), pp. 503-506, Nov 1-4, 2004. 13