Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
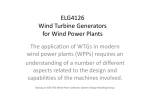
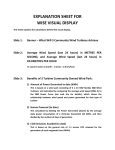
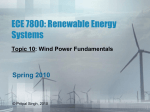
1 Advancements in the Harvesting and Utilization of Wind Energy K.V. Vidyanandan, Member, IEEE Abstract—Growing pollution concerns, depleting natural resources and increasing fuel costs are driving the nations world over to reorganize their energy mix, with more thrust to develop diverse sources of non-polluting, renewable and local energy. Wind, as an energy source, has incredible potential to meet all the above requirements. Wind energy along with equally promising technologies such as solar energy and fuel cells are going to be the possible solutions for our quest for an environmental friendly energy future. However, wind energy is a technology of variable output, with very little controllability and despatchability, which needs to be integrated into a highly dynamic electric system. This paper is an attempt to present an overview of major wind energy conversion methods, some of the challenges that required to be addressed for integrating this advanced technology with the existing power system. Index Terms - droop, frequency control, inertia, wind turbine. I. INTRODUCTION W IND energy has a number of advantages compared to traditional energy sources. Unlike fossil fuels which are not uniformly distributed and whose combustion that contributes to pollution and global warning (a major issue plaguing the planet), wind is a more distributed, clean, inexhaustible, and zero fuel cost energy source. Besides, it does not require water either as an energy carrier or as a coolant. Wind energy got the boost in 1973 when the oil crisis increased the price of oil based electricity. Wind energy conversion (WEC) technology has evolved considerably during the last two decades in terms of increasing power capacity and rotor diameter, as shown in Fig. 1. Large capacity wind turbines, typically 4-5 MW and above, is usually of offshore type, whereas small and medium capacity wind machines are of onshore or offshore. Fig. 1. Evolution of horizontal axis wind turbine sizes. Increased reliance on wind energy will have many positive impacts: a) on environment (due to reduced pollution by way of reduced fossil fuel consumption), b) energy security and stability in electricity price (being a K. V. Vidyanandan is a Senior Faculty Member with the Power Management Institute, NTPC Ltd., NOIDA, Uttar Pradesh, India (e- mail: [email protected]). local energy source, prices are not subject to fuel volatility), c) local economics (creates new income source and jobs for local population), and d) water savings (wind systems uses almost no water in the energy conversion process). A typical 1 MW wind turbine in an average location will annually displace nearly 2,000 tonnes of CO2. Assuming a life span of 20 years, a typical wind turbine on average takes only two to three months to recover all the energy spent to build and operate it. Compared to many other power generation methods, WEC systems need higher initial capital costs (generation capacity and transmission system), but has reduced O&M costs as the fuel cost is zero. However the technical challenges associated with this new technology is much more complex than the matured technologies. The advances in various fields of engineering such as turbine blade material, blade aerodynamics, electric machines, power electronics, and control system have made wind energy the fastest growing and one of the most promising and establishing energy technologies of the present time. Due to better conversion efficiency, reliability, reducing capital costs, and exponential yearly growth rate, wind energy is becoming increasingly competitive with other power generation options. Wind results due to the uneven heating of the earth’s land, water and atmosphere, which cause air to move over the surface. The energy available in wind is the kinetic energy of large masses of moving air. Wind turbines (WTs) extract energy from the wind by using aerodynamically shaped blades, which produce a lift force along the length of the blade. This force produces the torque on the turbine shaft, which in turn drives the electric generator. Wind turbines are generally grouped together into a wind farm, and generate bulk electric power. Electricity from these wind farms is fed into the utility power grid and distributed to the customers, just like any conventional power plant. The aim of this article is to provide an overview of major wind energy conversion methods, generator configurations, control methods and issues associated in the integration of wind energy with the electric network. The rest of the paper is organized as follows: an overview of various wind energy technologies are discussed in Section II, integration of wind energy with power system is presented in Section III, and the conclusions are presented in Section IV. II. OVERVIEW OF WIND ENERGY CONVERSION SYSTEMS According to the orientation of the axis of rotation with respect to the wind direction, wind turbines are classified into two categories: a) Vertical-axis wind turbines (VAWT) and b) Horizontal-axis wind turbines (HAWT). In VAWTs, the blades circle around a vertical axis and its rotor has the shape of an egg beater. This type of WTGs was used in the past because of certain structural advantages. However, most modern wind turbines use horizontal-axis design. 2 Except for the rotor, all other systems are the same in both designs, with some changes in their placement [1]-[2]. Typical arrangement of vertical axis and horizontal axis wind turbine generators is shown in Fig. 2. In order to limit the size and thereby cost of magnetics, electric generators are generally of high speed type, and therefore, turbine speed of 20-30 rpm will not be compatible for direct connection with generators. A gearbox is thus required to interface the high speed generator shaft with the low speed turbine shaft. The gearbox ratio depends on the number of magnetic poles and the type of generator. Fig. 3. a) Aerodynamic characteristics of wind turbine and b) Rotational speed range of high capacity wind turbine. a. Vertical axis WT b. Horizontal axis WT Fig. 2. Arrangement of vertical axis & horizontal axis WTs Due to the variations in the wind speed, the frequency of electric power generated will not be at the nominal frequency of 50/60 Hz. Hence, a frequency converter and a step-up transformer are used for interfacing the WTG with the power network. Fig. 4 shows various stages involved in the conversion of energy from the wind resource to electricity [3]. The mechanical power (Pm) extracted from the wind by a wind turbine is calculated as 1 (1) ρ AU w3 CP (λ , β ) 2 where, ρ = Air density, A = Rotor sweep area, Uw= Wind speed, = Blade pitch angle, Cp = Performance coefficient, and = Tip speed ratio. An analysis of the above equation reveals the following: in order to obtain a higher wind power, (a) it requires a higher wind speed, (b) a longer blade length for realizing a larger sweep area and (c) a higher air density. Because the wind power output is proportional to the cubic power of the mean wind speed, a small variation in wind speed can result in a large change in wind power. Energy in the wind depends on the density of the air as kinetic energy of a moving body is proportional to its mass (mass=volume*density). Air density is a function of altitude, temperature, pressure and humidity. Deviations in these parameters can vary the air density up to ±10%. Increase in ambient temperature reduces air density; at higher altitudes the reduced atmospheric pressure also reduces air density. The outcome of these effects will be a reduced power output from the wind turbine for the same wind speed. Rotor sweep area is a function of the turbine blade radius. A modern offshore wind turbine with 150 m diameter will have a rotor sweep area of nearly 18,000 m2. Since the sweep area is proportional to the square of the rotor radius, doubling the rotor diameter will increase the power output by four times, for the same wind speed. The tip speed ratio, which is the ratio between blade tip speed and wind speed, is limited to 80 - 100 m/s so that as turbines get bigger, their rotational speed reduces such that large turbines rotate slowly at around 20-30 rpm. Typical wind turbine aerodynamic power output as a function of rotational speed for different wind speeds is shown in Fig. 3a and the turbine rotor speed is shown in Fig. 3b. Pm = Fig. 4. Stages in the wind to electricity conversion process. In certain latest designs, direct drive generators without gearbox is also available. By using large diameter generators with multiple poles, like the ones used in hydro generators, a gearless drive arrangement is possible. This has reliability advantages since gearbox is the weakest link in the wind energy conversion chain. Yet, this type is presently not very popular because of very high cost since high performance permanent magnet material is virtually indigenous to China. Wind turbines are usually designed to start rotating at a cut-in wind speed of around 3-5 m/s. WTGs produce the rated power output at wind speeds around 13-14 m/s. In order to avoid damage to turbine, generator and converter, WTGs are taken out of service during high wind speeds of more than 25 m/s. This wind speed is known as the cut-out wind speed. The operating regions of a WTG as a function of wind speed are shown in Fig. 5. Fig. 5. Operating range of a WT as function of wind speed. 3 All energy in the wind cannot be harvested by the turbine blades due to a phenomenon known as rotor wake. The wake or shadow effect occurs because the air immediately behind the turbine blades moves very slowly due to lack of energy. After some distance behind the blades, as the less energetic wind stream mixes with the surrounding air, it regains some speed and moves faster. However, the almost dead air behind the turbine will prevent the free flow of fresh air and thus limits the energy captured by the blades. Theoretical limit of aerodynamic efficiency (Cp) is 59.26%, known as the Betz limit, which is comparable with the Carnot efficiency in thermodynamics. Modern WTs have Cp between 35-45%. During high wind speeds, it is necessary to limit the aerodynamic power developed by the turbine blades to avoid rotor over speeding and over loading of electric machine and the power electronics converters. There are three methods used for controlling the wind turbine power output during high wind speeds, these are: stall control, pitch control and active stall control. Stall control is used in small capacity WTGs, in which the turbine blades are designed in such a way that flow separation and thereby turbulence is created on the sides of the blade when the wind speed exceeds some specific value. The main drawback of this method is that at low wind speeds, the energy conversion efficiency will be low and at high wind speeds, increased vibrations. Pitch control uses separate actuators by which the turbine blades are pitched slightly out of the wind to reduce the aerodynamic efficiency and the power generated. The blades will be pitched back again once the wind speed drops. Pitch control is commonly used in variable speed WTGs. Active stall controlled WTGs also use pitchable blades. At low wind speeds, active stall turbines will operate like pitch controlled turbines. At high wind speeds, they will pitch the blades in the opposite direction than the normal pitching direction and force the blades into stall. This allows maintaining the constant rated power at all high wind speeds till the cut-off speed. The main disadvantage of the pitch control and the active stall control is the extra complexity and added cost. Based on the speed of rotation, WEC systems can be can be broadly classified into three categories: a) fixed speed, b) limited variable speed, and c) variable speed WTGs. In fixed speed WTGs the electric generator is usually of cage rotor type induction generators, which are directly connected to the grid through a transformer as shown in Fig. 6. Since the rotational speed of cage induction machine (CIG) is limited to a narrow range governed by the generator slip (2%), these types of generators are called fixed-speed wind turbines. Fig. 6. Fixed speed induction generator based wind energy conversion system. The main advantages of CIG are: they are robust, cheap and need low maintenance. However, due to fixed speed operation, any fluctuation in the wind speed will lead to torque fluctuation, which in turn will be reflected as power fluctuation. Besides, the constant speed operation also results in reduced energy conversion efficiency. Since reactive power needed by the CIG is drawn from its stator terminal, these machines cannot support grid voltage control. To meet the reactive power requirements, usually, capacitors are connected across the stator terminals and this may lead to overvoltage in islanding condition. For harvesting optimum energy from the wind, variable speed WTGs is the preferred choice. As reported, the energy capture in variable speed WTs can be 8-15% more than fixed speed WTs in some specific sites with specific technology. Variable speed WTs use power electronic controllers in the generator for regulating the rotor speed. Besides better conversion efficiency, variable speed WTGs have many other advantages such as improved power quality, reduced stresses on the mechanical components, acoustic noise reduction and possibility to control active and reactive power independently. There are many configurations of variable speed WTGs discussed in the literature, ranging from limited speed control of 10% to full speed limit. The limited variable speed (LVS) WEC system is the simplest and cheapest among all the variable speed WTG technologies. LVS-WEC system uses a wound rotor induction generator; with its stator winding is directly connected to the grid whereas the rotor winding is connected to a variable resistance through a power electronic converter. Speed control in the range of 1-1.1 pu is achieved by controlling the rotor resistance. The range of speed control in this method is limited to a low value as the increased speed deviation from the synchronous speed results in increased slip power extracted from the rotor, which is dissipated in the external resistance, causing a reduction in efficiency. The configuration of limited variable speed WTG is shown in Fig. 7 Fig. 7. Limited variable speed wind energy conversion system. For wider speed range and thereby achieving optimum energy conversion efficiency, the electric machines typically used in variable speed WTs are the Doubly-Fed Induction Generator (DFIG) and the multi-pole Permanent Magnet Synchronous Generator (PMSG). The term doubly-fed means both stator and rotor windings actively participate in the electromechanical energy conversion process. Due to variable speed operation, the power output of variable speed WTGs will not be at the nominal frequency of 50/60 Hz. Therefore, they require power electronic converters for interfacing the electric machine with the power system. DFIGs use partial scale power electronic 4 converters in their rotor circuit, while PMSGs use full scale power electronic converters in their stator circuit for grid connection. In case of DFIG, the rotor power output at slip frequency is converted to line frequency power using the back-to-back converter. When the generator speed is below synchronous speed, power is fed into the rotor circuit from the grid and if the rotor speed is above synchronous speed, rotor power is fed in to the system. By regulating the rotor power flow and its direction, the speed of DFIG-WTGs can be controlled in the range of 0.67 pu-1.33 pu. Because of the full scale converters, speed control range of PMSG is much higher than partial scale converter based DFIGs. Since only a small fraction of the generated power flows through the DFIG rotor circuit, the converter required in these types is only 20-30% of the full capacity. Performance of the full-scale converter based PMSGs is far better compared to partial-scale converter based DFIGWTGs over the entire speed range. However, full scale converter based systems are more costly and have higher losses in the power electronics, since all the generated power has to pass through the power converters. The arrangement of the DFIG based WEC system is shown in Fig. 8 and the PMSG based WEC system is shown in Fig. 9. output, if the machine were running at its rated (maximum) power during the entire 8760 hours of the year. The annual capacity factor of a wind farm typically ranges from 20-40% [4]. This does not mean that a wind farm will only generate power for 20-40% of the year. Wind turbines customarily generate useful power for 70-85% of the year, but not necessarily at their full capacity. A term generally used to represent the percentage of load demand met by the wind energy in a certain grid, on an annual basis, is the wind energy penetration. The wind (energy) penetration in percentage is defined as: Total wind electricity produced Wind energy penetration = Gross annual electricity demand The percentage share of wind energy in the power system is continuously increasing and many countries are targeting for 20% energy share from wind systems by the year 2030. Though technically this could be feasible, a few European countries like Denmark and Spain have already crossed 10% wind penetration, the issues that need to be addressed for realizing this ambitious task are enormous. In the classical energy conversion methods by using synchronous generators, driven by steam, hydro or gas turbines, both real and reactive power can be independently regulated as all these parameters are controllable. However, such is not the case with the WTGs. The major challenges of wind as an energy resource are largely related to its variable nature of speed and direction, as both these can change by the season, month, day, hour and minute. A typical wind pattern over a small time period is shown in Fig. 11. Fig. 8. DFIG based wind energy conversion system. Fig. 11. Random nature of the wind resource. Fig. 9. PMSG based wind energy conversion system. Of the two most popular WTG technologies (i.e. DFIG and PMSG), DFIG based wind turbines are more commonly used. Fig. 10 shows the conversion efficiencies of various intermediate stages of a typical 1.2 MW DFIG based variable speed wind energy conversion system at nominal operating condition [3]. Fig. 10. Conversion efficiency of various stages of a variable speed WEC system at nominal operating condition. III. INTEGRATION OF WIND ENERGY WITH POWER SYSTEM The annual energy output from a wind farm is usually represented as capacity factor, which denotes the actual annual energy output divided by the theoretical maximum As per the latest grid codes of many countries, wind farms must participate in the system frequency and voltage control functions, exactly like the conventional generating units. In order to participate in frequency control, wind farms must modulate the active power, including primary response and secondary response. In order to participate in voltage control, wind farms must generate or consume reactive power [5]-[7]. Most of the present-day WTGs get disconnected from the network when disturbances like large voltage sags develop in the grid. Once the WTG has been disconnected, it takes some time before the unit is reconnected to the grid. Disconnection of wind turbines during grid disturbances deteriorates the grid stability further and eventually the cascading effects may result in partial system collapse. New grid codes also stipulate that wind turbines to ride through voltage sags. This means that WTGs should support the power system to overcome the ill effects of disturbances in the same way the conventional synchronous machines do. With modern power electronics based controls, it is possible for the WTGs to deliver fault ride through capability, voltage control, and reactive power support to the grid. Few methods such as anti-parallel thyristors in the stator circuit, 5 active crowbar in rotor circuit etc. are being proposed in the literature to enable WTGs to ride through low voltage. Fault ride through capability of a typical wind turbine generator is shown in Fig. 12. Fig. 13. Reduction in the power system inertia with increasing penetration of wind energy. Fig. 12. Typical fault ride through capability of a WTG. Wind energy is often located in remote rural areas and the rural grids are generally weak and prone to voltage sags, faults, and unbalances. These disturbances will cause many problems for induction generators and connected loads. The integration of wind energy systems into the existing power grid depends on a number of factors, both technical and regulatory. The regulatory aspects include the percentage wind energy share, location of common point of coupling, WTG technology, generation mix of electricity in the system, and the size and characteristics of the network in which it is connected. The technical aspects include the effect on the system inertia and the droop [8]-[11]. Conventional synchronous generators possess two key qualities which are extremely essential in controlling the grid frequency. These are: a) system inertia and b) speed droop. Inertia is the property of a body to oppose any change in its motion. Inertia of the power system is proportional to the amount of rotating masses in the system [12]-[14]. It determines the rate of change of frequency following a load event. The larger the system inertia, the less is the frequency rate of change following a power imbalance. The initial turbine governor action immediately following a load event, known as primary control, establishes the active power balance between generation and demand by using proportional control action. This control action, known as droop control, arrests the frequency deviations due to the change in load [15]-[16].The droop parameter in the governor control loop allows multiple units to share common loads. For optimizing the energy conversion efficiency, most of the wind farms use variable speed WTG technologies. In order to prevent the reproduction of wind speed variation as frequency variation in the grid, variable speed WTGs use back-to-back ac-dc-ac power electronic converters for the grid connection. The intermediate dc bus in the converter creates an electrical decoupling between the machine and the grid. Because of this ac-dc-ac decoupling, the wind turbines, though they are very heavy, appear lighter to the system. Thus the increasing presence of WEC systems in the power system will reduce the effects of conventional synchronous generators that supply the major portion of the active power needed in the grid. The entire system will then behave as a lighter system. A lighter system will experience larger changes in the frequency even for small mismatches in the supply and demand. Graphical representation of the reduction in system inertia with increasing penetration of wind energy in the power grid is shown in Fig. 13. The increasing penetration of wind energy in the power grid increases the equivalent droop parameter of the system [17]. For instance, with a 20% wind penetration, the conventional generating capacity capable of providing primary frequency response reduces to 100/120=83.33%. The effective stiffness of the system decreases as the speed droop increases to R/0.8333=1.2R, where R is the initial value of permanent droop. The variation in the system droop due to the penetration of wind energy in the conventional system is shown in Fig. 14. The increase in droop value translates into a weaker system, less responsive to load changes and consequently, more frequency excursions result after every system event. Fig. 14. Variations in system droop due to wind penetration. a) No wind energy, equivalent system droop = 100% b) 20% wind penetration, conventional system has reduced to 100/120 = 83.33% c) Equivalent system droop is 1/0.8333 = 120% of original Since the droop parameter is incorporated in the primary speed control loop of a prime-mover governor, increase in the droop value will reduce the overall frequency control capability of the generating unit. IV. CONCLUSION For harvesting optimum energy from the wind resource, modern wind energy conversion systems generally use variable speed wind turbine generators, connected to the electric network through power electronic converters. The use of power electronic interface results in an electrical decoupling between the generator and the grid, due to which certain very important capabilities such as inertia and droop will be missing. Reduced effects of these parameters will reduce the frequency regulation capability of the wind generating units. When connected to the network, WTGs must also share reactive power requirements of the system. This is necessary to maintain voltage stability in the grid. The present day research in the wind energy systems is mainly focusing on these aspects so that by the end of the current decade, the reliance on conventional thermal units for maintaining system frequency and voltage will reduce drastically. The anticipated target of 20% wind energy by year 2030 could be realized without much difficulty. 6 REFERENCES [1] [2] T. Ackermann, Wind power in power systems, Wiley, 2005. Siegfried Heier and Rachel Waddington, Grid Integration of Wind Energy Conversion Systems, Willey, 2006. [3] E. Hau, Wind Turbines: Fundamental, Technologies, Application, Economics, Springer, 2006. [4] G.M.J. Herbert, S. Iniyan and R. Goic, “Performance, reliability and failure analysis of wind farm in a developing country”, Renewable Energy, vol. 35, pp. 2739-2751, 2010. [5] EirGrid Grid Code, Version 3.5, March 2011, available at http:// www.eirgrid.com/media/2011%20Mar%2008%20EirGrid%20Grid% 20Code%20Clean%20Version%203.5.pdf [6] Draft on Indian Wind Grid Code, July 2009, available at http://www. cwet.tn.nic.in/Hindi/Docu/Wind_grid_code_for_India%20.pdf [7] IEEE Standard 1547.1-2005: IEEE Standard Conformance Test Procedures for Equipment Interconnecting Distributed Resources with Electric Power Systems. [8] G. Lalor, A. Mullane and M. O’Malley, “Frequency control and wind turbine technologies”, IEEE Trans. Power Sys., vol. 20, No. 4, pp. 1905-1913, November, 2005. [9] G. Ramtharan, J.B. Ekanayake and N. Jenkins, “Frequency support from doubly fed induction generator wind turbines”, IET Renew. Power Gen., pp. 3-9, March, 2007. [10] J. Ekanayake and N. Jenkins, “Comparison onctionf the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency”, IEEE Trans. Energy Conv., vol. 19, No. 4, pp. 800-803, December, 2004. [11] J. Morren, S. W. H. de Haan, and W. L. Kling, “Wind turbines emulating inertia and supporting primary frequency control”, IEEE Trans. Power Sys., vol. 21, No. 1, pp. 433-434, February, 2006. [12] P. Kundur, Power system stability and control, McGraw Hill, 1994. [13] J. J. Grainger and W. D. Stevenson, Power System Analysis, McGraw-Hill, 1994. [14] P.M. Anderson and A.A. Fouad, Power System Control and Stability, Iowa State University Press, 1977. [15] H. Knudsen and J. N. Nielsen, “Introduction to the modeling of wind turbines,” in Wind Power in Power Systems, T. Ackermann, Ed., Wiley, pp. 525–585, 2005. [16] Angelo Baggini, Handbook of power quality, Wiley, 2008. [17] N. R. Ullah, T. Thiringer, and D. Karlsson, “Temporary primary frequency control support by variable speed wind turbines - potential and applications”, IEEE Trans. Power Sys., vol. 23, No. 2, pp. 601612, May, 2008. K.V. Vidyanandan (M’10) received his B. Tech from the National Institute of Technology (NIT), Calicut, D.C.A. from Raipur and M.Tech from the Indian Institute of Technology (IIT), Delhi, India. He is a Faculty Member in the Power Management Institute (PMI), NTPC Ltd., NOIDA, Uttar Pradesh, India. Prior to his joining at PMI, he has worked at Farakka, Korba, and Singrauli super thermal stations of NTPC. He is currently pursuing Ph.D. degree in Electrical Engineering at the IIT, Delhi, India. His research interests are wind energy conversion systems, energy storage, microgrid and load frequency control. E- mail: [email protected]