Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
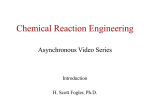
1 University of KwaZulu-Natal School of Engineering Power Systems 1 (ENEL 3PS H2) Symmetrical Faults on Three-Phase Systems Background Because of the size and nature of practical power systems, faults are an operational fact of life – these may take the form of open circuit or short circuit conditions and may be symmetrical (e.g. all three phases short circuited to ground) or asymmetrical (e.g. one phase short circuited to ground or to another phase). In the case of short circuit faults in particular, the currents that flow as a result of the fault depend on the internal voltages of the synchronous generators in the system and the amount of impedance between these generators and the fault. Short circuit currents can exceed normal rated current by an order of magnitude or more, and if allowed to persist can cause serious equipment damage (both thermal damage due to the heating associated with the large fault currents and mechanical damage due to the high magnetic forces on conductors, windings and busbars carrying fault currents). Power system faults are detected and removed (cleared) by protective relays and circuit breakers respectively. The power system engineers must therefore be able to calculate the prospective short circuit currents in each part of the system in order to be able to design the necessary relay protection schemes and to determine the required current interruption capability of the circuit breaker. Per Unit System and Percentage Quantities For fault (and other) calculations in power systems, the system variables and parameters are usually expressed in per unit or percentage of some specified base value. Both the per unit and percentage systems are methods of normalizing the variables and parameters of the system such that they become dimensionless ratios. This has the advantage of greatly simplifying the calculations, particularly in the presence of transformers. Example: Consider the example of an ideal transformer 6.6 kV / 380 V with 6000 V applied to its HV (primary) winding: The voltage output from the LV (secondary) winding is then (6000x380)/6600 = 345.45 V. The ratio of primary applied voltage to the rated voltage is 6000/6600 = 0.91 or 91% Likewise the ratio o f actual secondary voltage to its rated value is 345.45/380 = 0.91 or 91% Thus, in per unit, there is no change in the magnitude of the voltage from the primary side to the secondary side of the transformer (the same is true for the magnitude of the primary and secondary currents when expressed in per unit). This is the main advantage of the per unit system for the analysis of the power systems: it effectively removes all the different voltage levels from the analysis and greatly simplifies the manner in which transformers appear in the analytical model of the system. The per unit system also allows for greater insight into the system and allows for easier detection of obvious errors, both in the value of the system parameters and during the calculations of system behavior. For example: 2 Similar ratings of machines have similar per unit values of the same parameter; Because of the transformation in voltage levels from one part of the system to another, normal operating currents (in amps) in one part of the system may be larger than fault currents (in amps) in another part of the system at higher voltage. Per unit values have an advantage over percentage values in that the product of two values expressed in per unit is also in per unit; by contrast, the product of two values in percentage must be divided by 100 to obtain an answer in percentage. Advantages of pu System 1. 2. 3. 4. 5. 6. The ordinary parameters (current , impedance, losses etc.) vary considerably with the variation of physical size, terminal voltage, power rating, etc., while the per unit parameters are independent of these quantities over a wide range of the same type of apparatus. In other words, the per unit impedance values for apparatus of like ratings lie within a narrow range. The chance of confusion between line and phase values in three-phase balanced system is reduced. A per unit phase quantity has the same numerical value as the corresponding per unit line quantity regardless of the threephase connection whether star or delta. The impedances of machines are specified by the manufacturers in terms of per unit values. The per unit impedance referred to either side of a single phase transformer is the same. The per unit impedance referred to either side of a three-phase transformer is the same regardless of the threephase connections whether they are delta-delta, star-star, or delta-star. The computational effort in power systems is very much reduced with the use of per unit quantities. Usually, the per unit quantities being of the order of unity or less can easily be handled with a digital computer. Manual calculations are also simplified. Per unit quantities simplify theoretical deductions and give them more generalized forms. Base Value In order to express each variable in the system in per unit, we need to know the base value of that variable. By definition, base or unit impedance (in ohms) is that value of impedance which will have unit volt drop across it when unit current flows through it. From the above definition, the base value of a component in the system is defined in terms of its rated current and rated voltage, and hence in terms of its rated kVA. Because the kVA and line-to-line voltage ratings of a component are most readily available, the base values of current and impedance are typically calculated from these rated values. Hence, 𝐼𝑏𝑎𝑠𝑒 = 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 A where 𝑘𝑉𝑏𝑎𝑠𝑒 is the rated line voltage in kV, and 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 is the total three phase kVA rating. √3 × 𝑘𝑉𝑏𝑎𝑠𝑒 And then 𝑍𝑏𝑎𝑠𝑒 = 𝑘𝑉𝑏𝑎𝑠𝑒 × 103 √3 × 𝐼𝑏𝑎𝑠𝑒 Ω Alternatively, if 𝐼𝑏𝑎𝑠𝑒 is not known, then multiplying the numerator and denominator of the above expression by √3 × 𝑘𝑉𝑏𝑎𝑠𝑒 yields 𝑍𝑏𝑎𝑠𝑒 = (𝑘𝑉𝑏𝑎𝑠𝑒 )2 × 103 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 Ω From the base values so defined, then 3 𝐼𝑝𝑢 = 𝑎𝑐𝑡𝑢𝑎𝑙 𝑐𝑢𝑟𝑟𝑒𝑛𝑡 (𝐴) 𝑉𝑝𝑢 = 𝑎𝑐𝑡𝑢𝑎𝑙 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 (𝑉) 𝑏𝑎𝑠𝑒 𝑐𝑢𝑟𝑟𝑒𝑛𝑡 (𝐴) = 𝐼𝑎𝑐𝑡𝑢𝑎𝑙 = 𝑉𝑎𝑐𝑡𝑢𝑎𝑙 𝑏𝑎𝑠𝑒 𝑣𝑜𝑙𝑎𝑔𝑒(𝐴) 𝑍𝑝𝑢 = 𝑍Ω 𝑍𝑏𝑎𝑠𝑒 𝐼𝑏𝑎𝑠𝑒 𝑉𝑏𝑎𝑠𝑒 𝐼% = 100 × 𝐼𝑝𝑢 𝑉% = 100 × 𝑉𝑝𝑢 𝑍% = 100 × 𝑍𝑝𝑢 Conversion of Impedance Units Manipulation of the above expressions for impedance in ohms and per unit yields the following two relationships for converting impedances between real units (ohms) and per unit 𝑍𝑝𝑢 = 𝑍Ω = 𝑍Ω ×𝑘𝑉𝐴𝑏𝑎𝑠𝑒 𝑘𝑉𝑏𝑎𝑠𝑒 2 ×103 𝑍𝑝𝑢 ×(𝑘𝑉𝑏𝑎𝑠𝑒 )2 ×103 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 Choice of Base Values As seen above, when considering individual pieces of power system plant, the per unit values of parameters and variables are defined in terms of the kVA ratings of the plant itself. However, in realistic system there will be components in the system with different kVA ratings, as well as components (e.g. transmission lines and cables) for which kVA rating is not normally quoted. When analyzing systems of several components, it is therefore, necessary to convert all per unit values to a common base, that is to recalculate the per unit values of each component using the same, common values of base kVA. This common base can be completely arbitrary, but it is more efficient to choose a common value of base kVA that coincides with the actual kVA ratings of as many pieces of equipment in the system as possible. When changing from one base to another 𝑍𝑝𝑢 |𝑛𝑒𝑤 𝑏𝑎𝑠𝑒 = 𝑍𝑝𝑢 |𝑜𝑙𝑑 𝑏𝑎𝑠𝑒 × 𝑛𝑒𝑤 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 𝑜𝑙𝑑 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 𝑍𝑝𝑢 is not a function of voltage and therefore does not vary from one side of a transformer to another. 𝐼𝑏𝑎𝑠𝑒 and 𝑘𝑉𝑏𝑎𝑠𝑒 are functions of each other and of 𝑘𝑉𝐴𝑏𝑎𝑠𝑒 . By contrast, when working in actual units (ohms) impedances are transformed from one voltage level to another as follows 𝑍𝑝𝑢 |𝑛𝑒𝑤 𝑏𝑎𝑠𝑒 = 𝑍𝑝𝑢 |𝑜𝑙𝑑 𝑏𝑎𝑠𝑒 × ( 𝑛𝑒𝑤 𝑘𝑉𝑏𝑎𝑠𝑒 2 ) 𝑜𝑙𝑑 𝑘𝑉𝑏𝑎𝑠𝑒 Three Phase Short Circuits In such types of faults all the three phases are short circuited to each other and often to earth also. Such faults are balanced and symmetrical in the sense that the system remains balanced even after the fault. A three phase short circuit occurs rarely but it is the most severe type of fault involving largest currents. For this reason, the balanced short circuit calculations are performed to determine these large currents to be used to determine the rating of the circuit breaker. Symmetrical short circuit current levels (or fault levels) vary from one point of the power system to another; short circuit levels also vary with the amount of generating plant and with the amount of load on the system at any time. 4 These fault levels are usually expressed in MVA as follows: 𝑀𝑉𝐴 𝑙𝑒𝑣𝑒𝑙 = √3 × 𝑆𝑦𝑠𝑡𝑒𝑚 𝑘𝑉 × 𝑠ℎ𝑜𝑟𝑡 𝑐𝑖𝑟𝑐𝑢𝑖𝑡 𝑐𝑢𝑟𝑟𝑒𝑛𝑡 × 10−3 At any given time, the short circuit levels are greatest at the busbars of the largest generating station or possibly at the busbars of a station forming the junction between several such stations. Conversely, the short circuit levels are lower at points in the system that are electrically far from the generating stations. For the safety of switchgear, which has only a limited current interrupting (or rupturing) capacity, fault levels must be limited; to this end it may be necessary to insert series reactors in lines or busbars and to pay special attention to the design of generators. However, the use of high speed automatic voltage regulators on generators has become widespread because of the positive impact these controllers have on transient stability; their use however contributes to increased fault levels. Current Limiting Reactors Fault currents may be large enough to cause damage to the line and other equipment of a power system network. The interrupting capacities of the circuit breakers to handle such currents would also be very large. Fault current is limited by the system reactance, which includes the impedance of the generators, transformers, lines and other components of the systems. Modern generators have reactance large enough to limit the fault currents. However, old generators have low values of reactance. The fault levels increase with the growth of the interconnected system. Therefore, if the system is large enough or some of the generators are old, the fault current can be kept within safe limits by increasing the system reactance. This is done by connecting current limiting reactors at strategic points in the system. Current limiting reactors are coils used to limit current during fault conditions. Such reactors have large values of inductive reactances and low ohmic resistances. Location of Reactors Current limiting reactors may be connected (a) in series with each generator (b) in series with each feeder (c) between busbar sections. Generator Reactors When the reactors are connected in series with each generator, they are known as generator rectors. Fig. 1: Generator reactors The Fig. 1 shows the location of generator reactors. The feeders are connected directly to the busbars. Modern generators are designed to have sufficiently large reactance to protect them even in dead short circuits at their terminals. Thus, current limiting reactors may only be used old generators having low values of reactance. Generator reactors suffer from the following drawbacks. 1. 2. The full load current flowing in the reactor under normal operation produces a constant voltage drop and power loss in each reactor. If a busbar or feeder fault occurs close to the busbars, the voltage at the busbar drops to a low value with the result that generators may lose synchronism and the supply may be interrupted. 5 Feeder Reactors When the reactors are connected in series with each feeder, they are known as feeder reactors as shown in Fig. 2. Fig. 2: Feeder reactors These are two main advantages of feeder reactors. (i) (ii) If there is a fault on any feeder, the voltage drop in its reactor will not affect the busbar voltage, therefore, there is a little chance for the generator to loose synchronism. The fault on one feeder will not affect other feeders. The feeder reactors have the following limitations:(i) (ii) (iii) There is constant voltage drop and power loss in each reactor during normal operating conditions. If a fault occurs at the busbars, no protection is provided to generators. If the number of generators is increased, the sizes of the feeder reactors should also be increased. Busbar Reactors Generating station busbars are sectionalized and reactors are connected between sections which is the most common method of connection of reactors between generator busbars. Two methods of reactor connections are used which are: (a) ring main system (b) tie-bus system. The ring main system and tie-bus system are shown in Fig. 3 and Fig. 4 respectively. Fig. 3(a): Ring main system Fig. 4: Tie-bus system Fig. 3(b): Ring main system Under normal operating conditions each generator supplies feeder connected to its own section, and there will be no current through the reactors. Thus, there is no voltage drop or power loss in the reactor during normal operation. The busbar reactors localize the faults. For example, if a fault occurs on a feeder, only that busbar section is affected to which it is connected. The other sections continue to operate normally. In the ring system, the current transferred between two sections flows through two paths in parallel, whereas in tie-bus system, the current flows through two reactors in series. However, they carry twice as much current as the ring reactors. The tie-bus system is more flexible than the ring system. With the tie-bus arrangement extra generator may be added to the system without addition of extra circuit breakers or increasing the existing reactance.