Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Geomorphology wikipedia , lookup
History of geomagnetism wikipedia , lookup
Map projection wikipedia , lookup
Post-glacial rebound wikipedia , lookup
Tidal acceleration wikipedia , lookup
Magnetotellurics wikipedia , lookup
Schiehallion experiment wikipedia , lookup
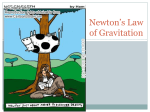
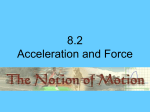
2.1 Gravity and the gravity field of the Earth Fundamentals The mass and shape of the Earth The Geoid Satellite measurements of gravity GRACE - Gravity Recovery and Climate Experiment Fundamentals The force that attracts all matter to the Earth is the gravity field; an example of the general phenomenon of attraction between any masses. Newton's Law describes the force of attraction between two point masses, M1 and M2 separated by r: F G M 1M 2 r2 (2.1.1) The force per unit mass, F/M2 defines the vector gravity field or the gravitational acceleration, g when M1 is the Earth (Me) and r is the radius of the Earth, Re. So M F = g = G 2e r M1 Re (2.1.2) [Note that vectors are denoted either in boldface text or with an overlying arrow, e.g. r .] The gravitational constant G has been determined experimentally and is: -1- 6.67259 x 10-11 m3 kg-1 s-2 ( SI units ) or 6.67259 x 10-8 cm3 g-1 s-2 with an uncertainty of 100 parts per million (ppm). The gravitational acceleration is also measured experimentally and at the equator is about 9.8 meters/sec/sec (m s-2) or 980 cm s-2. (In almost all gravity surveys results are presented in c.g.s units rather than SI units. In c.g.s the unit acceleration, 1.0 cm s-2, is called the gal (short for Gallileo). A convenient subunit for surveys is the milligal, mgal, 10-3cm s-2. Another unit that has been used is the gravity unit, gu, which is defined as 10-6 m s-2 or 0.1 mgal.) Some properties of the gravitational force field are required for explaining the variations in g that are observed on and above the Earth's surface and for interpreting these variations in terms of the desired distributions of densities in the subsurface. A test mass M gains potential energy U in being moved a distance S in the gravitational force field F according to: B B A A U F dl M g dl Figure 2.1.1 -2- (2.1.3) For example, moving a test mass vertically along the radius for uniform spherical earth the difference in potential energy is: R2 R 1 R2 R2 1 GM e GM e F dr g dr GM e 2 dr R1 R1 r M R2 R1 the function U GM e is the potential of that point in space. All points in space R that have the same potential define an equipotential surface. By definition the force field is everywhere perpendicular to the equipotential surface. Potentials cannot be measured directly, only their force fields. Potential fields are conservative meaning that the work done in moving from A to B in Figure 2.1.1 is independent of the path taken. It is obvious from the simple example of the force between two masses that the force Mg is simply the derivative of the potential in the direction between the masses. In general, for any conservative field; g U (2.1.4) Potentials are additive so that for any point P external to a volume V of matter: U P r ' V r d 3r Gdm G V r ' r r ' r -3- (2.1.5) Figure 2.1.2 This is the basic formula used to calculate the potential of any subsurface density distribution. [Note that this integral has the form of a convolution of the density (the source function) and the mathematical form of the fall off with distance of the field from a source point (the Green’s function). This concept will be used later to derive a fast and efficient method to calculate the gravity anomalies from subsurface bodies.] Another property of this conservative force field is that the integral of the normal component of the gravitational acceleration over the surface S of the volume containing mass M satisfies Gauss's law: g n dS 4 G V dm 4 G V dV -4- (2.1.6) This relationship is easy to verify for a sphere of uniform density, but Equation 2.1.6 is more general, and applies to any volume with arbitrary density. We will use this integral later in the section on interpretation to determine the excess mass of any finite body in the subsurface. The divergence theorem states that: òS g × n ds = òV Ñ × g dV (2.1.7) and g U so, U 4 G V dV or v 2U 4 G dV V In any region where no matter is present, for example in the space above the earth, this leads to: 2U 0 Laplace’s equation The mass and shape of the Earth The mass of the earth can be estimated through Gauss’ law: -5- (2.1.8) g n dS 4 G dV 4 GM e (2.1.9) V The radius of the earth Re was determined remarkably accurately by Eratosthenes in the third century B.C. using the observations shown in the sketch of Figure 2.1.3. This was arguably the first geophysical measurement. Figure 2.1.3 It is now known even more accurately through geodetic measurements. Assuming a spherical earth with a mean value of observed g, the experimental measurements of -6- G, and the radius, the mass of the Earth is found from g 4 Re GM e to be 2 5.976 × 1024 kg. If there were a perfect sphere of uniform density the gravity field measured on its surface would be the simple Newtonian field of a point mass at the center of the earth plus the radial acceleration term caused by the rotation of the earth as shown in Figure 2.1.4. Figure 2.1.4 The Earth is not a perfect sphere and it is very close to the shape that a spinning fluid would have. Because of the rotation the Earth is flattened as shown in Figure 2.1.5 and to first order the shape is that of an oblate spheroid or ellipsoid. -7- Figure 2.1.5 Any section through the axis of rotation is an ellipse in which the minor axis is the polar diameter and the major axis is the equatorial diameter. The flattening is described by the flattening parameter: f Re R p Re (2.1.10) Early measurements of f were made geodetically, that is by measuring the varying length on the surface of a degree of latitude. More accurate measurements are now made using satellites. The orbit of an earth satellite over a spherical earth of uniform radial density distribution is a stationary ellipse. Because of the bulge associated with the flattening the extra ring of mass exerts a pull or torque on any orbit that is inclined to the equatorial plane. Accurate measurement of the resulting rotation of -8- the plane of the satellite orbit, known as the precession, leads directly to an estimate of the flattening [See the classic text by Kaula (1960)]. The Geoid Because the Earth is rotating the observed gravity field has an added component due to the centrifugal acceleration. At point A on the surface at latitude and radius r, Figure 2.1.4, the centrifugal acceleration, grot, in the direction normal to the surface is given by: grot 2 R cos cos 2 R cos2 where is the angular frequency of rotation. This centrifugal grot is in the opposite direction to the gravitational g so the observed g is given by: gobs g z 2 r cos2 The value of gz on the oblate spheroid is not a simple calculation and the credit for the solution, including the rotation term, is due to Clairaut. Clairaut solved the problem for the gravitational potential on the surface of the oblate spheroid. This surface is in fact an equipotential surface; the gravitational acceleration vector is everywhere perpendicular to this surface. The actual surface of this equipotential is defined as the geoid. The ideal surface derived from the symmetric ellipsoid is called the reference ellipsoid and it does not coincide exactly with the actual geoid because the Earth is not homogeneous in density and there are deformations in the actual geoid caused by subsurface inhomogeneities that invalidate the fluid earth hypothesis. -9- The mathematical description of the gravitational acceleration on the reference ellipsoid incorporates the flattening information from satellite orbits, the angular frequency, the equatorial value of g, and the equatorial radius in a closed form expression for the value of g as a function of latitude on the reference spheroid. A reference field, World Geodetic System 1984 (WGS84), is given by: g 0 9.7803267714 1 0.00193185138639sin 2 1 0.00669437999013sin 2 (2.1.11) For this reference spheroid: The equatorial radius, Re, is 6378.137 km The flattening parameter, f, is 1/298.257 Acceleration at the equator, ge, is 9.7803267714 ms-2 This reference field is used to remove the first order variations due to latitude that are observed in gravity surveys. While not corresponding to the actual shape of the earth the equipotential ellipsoid is in a way a mathematical construct that is used by geodesists as a reference shape for surface elevation mapping and satellite positioning. The gravity field of this reference ellipsoid fulfills the same role for geophysicists interested in perturbations of the gravity field caused by subsurface density variations. The actual equipotential surface, the geoid, is usually described in terms of its departure from the reference ellipsoid. Alternatively the values of g on the geoid can be described with respect to the values of g for the reference ellipsoid. The actual geoid is found to be a very complex shape with undulations in its surface with a wide range of length scales. The only place where the geoid is easily ‘seen’ is the -10- ocean surface that is the equipotential that defines the geoid. Over land the geoid is a less intuitive concept. The usual concept is to imagine canals that extend through the land mass. The water surface in these canals are sections of the geoid. The details of the geoid were first glimpsed in fitting scattered worldwide absolute measurements of g and these indicated a pear shape superimposed on the ideal ellipsoid. A much more detailed geoid was derived from interpretation of satellite orbits. The general form for the potential of an arbitrary spheroid is given by an expansion of Laplace’s equation for the potential in spherical harmonics. The first term in the expansion accounts for the flattening of the spheroid but higher order terms account for distortions of gravity caused by density inhomogeneities or deflections of the surface on any scale. The general solution for the Laplace equation in spherical coordinates describes the potential above the earth. From the potentials the accelerations are derived and in turn the forces acting on an orbiting satellite are derived to determine the orbit. An inverse procedure is used to convert the observed satellite orbits and their precessions and irregularities into estimates of the coefficients of the terms in the solution to Laplace’s equation. With the solution established, all the equipotentials, including the one that corresponds to the geoid, and gravity values can be specified. Whether the gravitational field is described by an equipotential or in a derivative of the potential – a gravitational acceleration – is a matter of choice. They are of course directly related and in the case of a simple isolated mass beneath the surface there is a simple relation between the geoid height the potential and gz. Consider the model of a seamount shown in the sketch of Figure 2.1.6. -11- Geoid H M' A er Smith and Sandwell 2004 Figure 2.1.6 The seamount is a volume of excess mass M’ with respect to the surrounding ocean. The potential U above it must be bigger than at points off to the side. Consequently one would have to move to a bigger earth radius to be at the same potential as found off to the side. The equipotential surface is therefore warped up over a subsurface body of excess mass. Since the ocean surface is an equipotential the ocean has an induced surface ‘dome’ over the seamount. In detail the background standard gravity gz away from the seamount is: gz GM e Re2 and the potential is -12- GM e . Re As we move to a point over the excess mass M’ the potential increases so the background equipotential must move to a bigger earth radius, Re H so the change in potential U must satisfy U Since H GM e GM e GM e GM e 1 Re Re H Re Re H 1 Re Re we have: U GM e GM e GM e H 1 2 H gz H Re Re Re Re (2.1.12) This final equation, U g z H , relating the geoid height perturbation to the potential difference and gravity is known as Brun’s formula. A perhaps more useful formula relating the gravity anomaly g to the geoid deflection is given by Li and Gotze (2001). For a two dimensional anomaly with a spatial wavelength and geoid height anomaly of H the relationship is: 2 9.8 105 H cm g mgals cm (2.1.13) The resolution of the gravity maps is about 10 mgal so as Li and Gotze point out a 10 mgal anomaly reflects a geoid deflection of only 1.6 cm. Conversely we will find later that direct mapping of the ocean geoid surface by satellite radar altimetry has a resolution of about 1.0 cm and so has a resolution of 6 mgal – just what is claimed. Satellite measurements of gravity -13- The standard approach for determining the geoid is to obtain the gravity values from the tracking of satellite orbits and combining these values with absolute gravity values measured on the earth’s surface and then fitting these values to the general solution in spherical harmonics up to whatever degree and order is dictated by the noise level of the data. The actual process is somewhat iterative because more and more satellite data can be averaged for better and better gravity maps which in turn lead to better and better definitions of the geoid and indirectly to better integration of land surface gravity values, A world gravity map based on two decades of satellite gravity alone referenced to the WGS84 ellipsoid is shown in Figure 2.1.7 and the geoid height, again referenced to the WGS84 ellipsoid is shown in Figure 2.1.8. Obviously the gross features of both maps are similar related as they are through exact forms of Brun’s formula or the formula from Li and Gotze. -14- Figure 2.1.7. Gravity model based on decades of tracking geodetic satellites -15- Figure 2.1.8. Geoid height Satellite orbits are affected by all the terms in the expansion but it turns out that the accuracy possible in monitoring the orbits limited the expansion to the first 30 or so terms. This basically restricted the definition of the geoid to features that have fairly large spatial extent, on the order of 100s to 1000s of kilometers. Figure 2.1.9 is a map of the height of the geoid from the reference WGS84 reference ellipsoid based on satellite data and ground data using spherical harmonic coefficients to degree and order of 360. This map shows the anomalies in remarkable detail. It is these perturbations of gravity and the geoid that are of interest to geophysicists. The map shows upper mantle and crustal features that had never been seen before and it has opened a whole new window on understanding large scale geological processes. All of them reflect certain departures from equilibrium conditions in a model that, in the long term at least, is supposed to be fluid-like or at least plastic. If the mantle is indeed viscous then a mass concentration should sink reestablishing equilibrium and removing the geoid anomaly. Similarly if the crust is rigid the accumulation of mass in crustal land masses should deform the geoid. The maps of Figure 2.1.8 and Figure 2.1.9 show no broad correlation with the continents or ocean basins so these features are indeed in equilibrium with the underlying mantle. The most notable features are the major depressions over the Indian ocean, over the northeastern part of Canada, off the west coast of Mexico and in the Atlantic north of the South American continent and, at higher resolution, in the western US. It is likely that the Canadian anomaly is due to the fact that its location was the center of North American glaciation and the weight of the ice depressed the surface, the ice -16- melted relatively quickly and the crust is rebounding on a longer time scale. Other large scale anomalies could be due to asymmetries in the core-mantle boundary or to convection in the mantle. Convection could lead to positive geoid height anomalies by the upward deflection of the surface above a mantle upwelling. An example of the fine detail available form the latest geoid maps is the by now famous high in the geoid over Yellowstone shown in Figure 2.1.10. Figure 2.1.10 This feature is interpreted as due to the upwelling of deep mantle rock into the crust causing the Yellowstone hotspot. Here the geoid height reflects a regional high in topography; the density anomaly and topography are not in fluid equilibrium. Note also the well-defined geoid low coincident with the Central Valley of California. We will return to this feature later in a discussion of even higher resolution gravity data that has recently become available from the GRACE satellite project. -17- Satellites have also been used to map shorter wavelength distortions in the geoid over the ocean. The ocean surface is of course the geoid but accurate maps of its surface elevation were not possible until the advent of radar altimetry from a stable orbit satellite. The radar altimeter actually maps the undulations in the geoid surface shown in the sketch of Figure 2.1.11. Figure 2.1.11 Repeat passes of the satellite average out the tidal and wave motions and the resulting surface can be mapped to centimeters. The resolution obtained is determined mainly by the noise introduced by wave and tidal height variations. To some extent these are reduced by repeated averaging from many satellite passes. In terms of anomaly resolution the altimetry data essentially takes over from the -18- gravity data for all the short wavelength features (but only over the ocean). The geoid surface over the ocean directly maps ocean bathymetry in addition to features caused by mass excesses beneath the ocean. A map of the geoid surface converted to bathymetry is presented in Figure 2.1.12. A more detailed portion of the Gulf of Mexico and the Carribean is shown in Figure 2.1.13. Evidently the resolution is on the order of 10 km. Converted to gravity the resolution is on the order of 10 mgals. Better picking of radar arrivals and better averaging methods have dramatically improved the resolution so that today the resolution is ~3 mgal with spatial resolution of 5 km. Depth resolution is much less than that obtained from shipboard sonar but then there is not much possibility of covering the oceans of the world with a pattern of courses with close spacing. The gravity accuracy similarly is less than that that can be obtained from modern ship borne gravimeters: 0.2 mgal with spatial resolution of 0.25 km. Figure 2.1.12 and Figure 2.1.13 are from NOAA. GRACE - Gravity Recovery and Climate Experiment The direct measurement of gravity can be achieved using two identical satellites spaced apart a distance D along a common orbit as shown in the cartoon of Figure 2.1.14. -19- Figure 2.1.14 When the satellite pair passes over an anomalous excess mass M’ in the Earth each satellite is subject to an anomalous gravitational acceleration. One component is the vertical gz which would have a small perturbing effect on the whole orbit, but another component acts along the line joining the two satellites. This component adds a small acceleration in the orbit path first towards the mass, zero over it and then in the opposite sense past the mass. The result is that the satellite speeds up approaching the mass and then slows back down after it. For a pair of satellites each experiences exactly the same speeding up and slowing down but because they pass over the mass at different times there is a relative velocity difference between them as the pair passes over the mass. Wolf (1969) suggested that a pair of satellites spaced apart about 200-500 km and equipped with a Doppler shift system to measure the inter satellite velocity would have an effective sensitivity of 1.0 mgal. His elegant analysis was based on potential and kinetic energies of an exact orbit and the important conclusion was that the only the velocity along the orbit absorbed significant energy. -20- The general idea of such a twin satellite direct measurement scheme was taken up in the design of the Gravity Recovery and Climate Experiment, GRACE. The designers of the Grace system realized that microwave ranging systems could be employed to measure changes in distance between the satellite pair to less than 10 micrometers. Figure 2.1.15 provides a qualitative explanation of how the Grace system works. Figure 2.1.15 Consider the distance S travelled by satellite 1 with velocity v along an orbital path over an excess mass. The mass has a horizontal component of gravitational acceleration gx shown in the figure as the cross over anomaly – attraction towards the point over the mass to the left of the mass and opposite beyond the mass to the right. The distance travelled is given by S vt -21- 1 2 g xt . Initially the time distance 2 plot is a straight line with slope 1/v but as the horizontal acceleration increases the satellite speeds up and the time-distance curve flattens out until the acceleration cross over is reached and it is slowed back down and follows the original 1/v slope. Satellite 2 follows behind at a distance D but it crosses the starting point of the above graph at a later time so its time distance plot is simply displaced up. With respect to the path of the lead satellite it can be seen that the separation first increases to a maximum D’ above the mass lessens to a minimum D” just past the mass and reverts to the normal separation beyond there. Thus the separation plot mimics the acceleration. For a two dimensional mass and the assumption of a flat Earth and horizontal flight path we will see in a later section that a profile of gx can be converted to a profile of gz or to the potential itself by simple Fourier transform operations. The GRACE satellite pair traverses a full polar orbit 16 times a day and does not co-rotate with the Earth, so that it sweeps a complete three-dimensional surface of gx values. Fitting these values to a spherical harmonic expansion allows the gx values to be converted to values of gz or to the potentials. The fact that the satellite pair has been in continuous operation for over 10 years has allowed a tremendous amount of averaging to yield gravity maps of unprecedented accuracy. Perhaps more important the continuous mapping coupled with the high accuracy has permitted the mapping of gravity changes with time. Some examples below show how this latter capability has opened a whole new window for applied geophysics in groundwater monitoring, ice melting, tectonic processes and ocean dynamics. A summary of the GRACE project and a comprehensive list of scientific papers on it and the results obtained from it and be found at the GRACE website. The GRACE satellite pair was launched in 2002 from Russia and put into polar orbit at a mean height of ~500 km. The satellites are virtually identical, 220 km apart and -22- they complete an orbit in 95 minutes. The Global Positioning System tracks them very accurately and they have high sensitivity on-board accelerometers to measure accelerations not caused by gravity. In the first 110 days a world gravity map was released, Figure 2.1.16, that revealed detail at least an order of magnitude better than any previous map (compare to Figure 2.1.7). With time and averaging the resolution improved dramatically until the point that changes in gravity over a period of a year could readily be seen. An example derived from gravity changes between 2011 and 2013 is a study of groundwater depletion in the Central Valley of California. The gravity data were first converted to a change of mass and then converted to an equivalent change of ground water level. The levels are shown in the 3 panels of Figure 2.1.17. It can be inferred that the resolution is now on the order of 10.0 km. -23- Figure 2.1.17 As indicated on the figure caption the mass deficit revealed by the gravity changes shows that 15 cubic kilometers (~4×1012 gallons or 12.3 million acre feet) of water is evaporating every year. The gravity data has introduced factual numbers into running debates on water usage in California. -24- Another remarkable result is that the GRACE data have been used to track changes in the mass of ice in the Greenland ice cap (Velicogna, 2009) Figure 2.1.18 (source NASA website) The rate of ice mass loss has increased in the eight years that measurements have been made and the melt in western Greenland is now accelerating. The detail is so good that it can be seen that ice mass is actually being added to portions of Greenland while being subtracted around the edges. In this section we have gone from some basic potential field theory through to the gravity field of the Earth and its first-order ellipsoidal shape. We have introduced the concept of the geoid and shown how accurate measurements of the geoid shape, using satellite orbits and satellite altimetry over the ocean, reveal distortions in the gravity field caused by very large scale geological processes in the -25- crust and upper mantle. These features are of a much broader scale than those revealed in more traditional gravity surveys conducted on land or on the ocean for resource exploration and studies of crustal geology. Finally we have seen how the GRACE system measures gravity with an accuracy and resolution that overlaps the gravity maps made on large scale ground and marine conventional surveys. We now focus on measurement and processing of the much higher resolution gravity data obtained in conventional land and marine surveys. -26-