Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
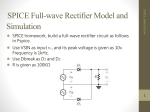
Outline Lecture 1: Embedded System Design (HW-SW Co-Verification) Lecture 2: OpenRISC-Based Embedded System Design Introduction to Embedded System and SoC System-Level Design Approach HW-SW Co-Verification Introduction Introduction to OpenRISC OpenIDEA Practice (1) Embedded System Design (HW-SW Co-Verification) March. 2007 Dynalith Systems www.dynalith.com Embedded system and SoC (1/2) An embedded system is a specialpurpose system in which the computer is completely encapsulated by the device it controls. Unlike a general-purpose computer, such as a personal computer, an embedded system performs one or a few pre-defined tasks, usually with very specific requirements. Characteristcs Single-functioned: Executes a single program, repeatedly Tightly-constrained: Low cost, low power, small, fast, etc. Reactive and real-time: Continually reacts to changes in the system’s environment; Must computes certain results in real-time without delay. Introduction System-on-a-chip (SoC or SOC) is an idea of integrating all components of a computer or other electronic system into a single chip. It may contain digital, analog, mixed-signal, and often radio-frequency functions – all on one chip. A typical application is in the area of embedded systems. SoC = A complex IC that integrates the major functional elements of a complete end-product into a single or chipset (from ‘Surviving the SOC revolution’) Single chip or integrated chipset (designed together) Integrates the major functional elements of a complete end-product (system) Usually incorporates a programmable processor, on-chip memory, and accelerating function units implemented in hardware Interfaces to peripheral devices and/or the real world. Often incorporates analog/mixed-signal (AMS) components May include opto/microelectronic mechanical system (O/MEMS) components (3) Embedded system and SoC (2/2) Application Application Real-Time Operating System Special Function block Control Processor(s) SoC Embedded System Memory system Data processing Processor(s) On-chip Peripherals network Peripherals Introduction (4) System-level design approaches Top-down approach / Application-driven Orthogonalization of concerns: Separate Implementation from conceptual aspects Separate computation from communication Formalization: precise unambiguous semantics Abstraction: capture the desired system details (do not over-specify) Decomposition: partitioning the system behavior into simpler behaviors Successive refinements: refine the abstraction level down to the implementation by filling in details and passing constraints Introduction Bottom-up approach / Technology-driven IP reuse Platform architecture from pre-existing library Meet-at-middle approach Platform-based Functional design and architectural mapping (5) Top-down design approach System Spec. HW-SW Co-Design HW IP System Design SW IP HW/SW Partitioning Functional Verification HW-SW CoVerification Software Verification HW Development SW Development HW refinement (UT->T->RTL) SW refinement (RTOS mapping) Gate Final code Gate-Level Verification Introduction (6) Bottom-up approach (1/2) Introduction (7) Bottom-up approach (2/2) Frame or skeleton is a system consisting of blocks which are required to run a software. Platform is a pre-designed architecture that designers can use to build SoC for a given range of applications. Flash SDRAM ARM7 ISS ARM DMA Flash SDRAM Memory controller LCD controller DCT/IDCT PIC RAM Memory controller PIC AHB-APB LCD AHB AHB AHB-APB BFM CCD interface Timer VLD DMA CCD APB APB GPIO UART GPIO USB Introduction (8) Timer USB Meet-at-middle approach Functional design and architectural mapping FDCT quantizer entropy encoder entropy decoder JPEG Dequantizer Source image data IDCT Re-constructed image data MEM P On-chip-network Bluetooth Device Link Manager Test bench Bluetooth link controller Synch control Transport Decode Behavioral/functional design ARM7TDMI (CPU) Memory Rate buffer Video decode Rate buffer Audio decode/ output Frame buffer Video output Memory Set-to box behavior Architectural design RTOS RTOS Memory User/Sys control Rate buffer Mapping Bluetooth link controller Shared bus & memroy architecture uP Adopted from ‘System-on-a-chip verification’ – P. Rashinkar et.al. Introduction Memory Transport Decode Audio decode/ output Vidie decode Video output Adopted from ‘Surviving the SOC revolution’ – H. Change et.al. (9) Hardware design in general Logic (RTL) design Logic simulation Logic debugging RTL code (Verilog) Logic synthesis iPROVE compilation Placement & routing iPROVE RTL code & FPGA library RTL code & Target library Netlist & Gate delay (SDF) GDSII & Test-vector Logic synthesis Placement & routing FPGA bit-stream iNTUITION Logic synthesis FPGA Debugging Netlist (EDIF) Gate-level simulation Gate-level debugging Placement & routing Timing simulation GDSII Timing analysis Semiconductor fabrication Introduction ( 10 ) How to verify the hardware in the context of software? Software design in general Develop board or training board JTAG-based Compiler Source-level debugger Profiler What if development board is not available? Introduction ( 11 ) Hardware/Software Co-Verification System on Chip (SOC) Trend toward greater system integration, such as the demand for low-cost, highvolume consumer products A single chip that includes one or more microprocessors, application specific custom logic functions, and embedded system software Hardware/Software co-verification Addressing one of the most critical steps in the embedded system design process, the integration of hardware and software Becoming a verification technique used by more and more engineers Allowing projects to be completed in shorter time and with greater confidence Introduction ( 12 ) Commercial Co-Verification Tools Eaglei Viewlogic Eagle Design Automation Synopsys System Studio Synopsys Seamless CVE Mentor Graphics The most successful for the commercial co-verification tools V-CPU Cisco Systems MaxSim AXYS Design Automation ARM ConvergenSC CoWare Introduction ( 13 ) Benefits of Co-Verification Both hardware and software teams benefit from co-verification. Early access to the hardware design for software engineers Allowing software that is dependent on hardware to be tested and debugged before a prototype is available Additional stimulus for the hardware engineers The early software test provides an additional test stimulus for the hardware design. Project Schedule Saving Traditionally, software engineers suffer because they have no way to execute the software they are developing if it interacts closely with the hardware design. Co-verification addresses the problem of software waiting for hardware by allowing software engineers to start testing code much sooner. Introduction ( 14 ) Project Schedule Saving Project schedule without co-verification Requirements Architecture HW Design HW Build SW Design HW/SW Integration SW waiting for HW Project schedule with co-verification Requirements Architecture HW Design HW Build SW Design HW/SW Integration Time Savings Project Time Introduction ( 15 ) Benefits of Co-Verification Providing Visibility Able to see exactly the correlation between hardware and software Not only useful for debugging, but even more useful in providing a way to understand how the microprocessor and the hardware work Providing information to identify bottlenecks in performance using bus activity or cache hit rates Improving Communication Many companies separate hardware and software teams to the extent that each does not really care about what the other one is doing, a kind of “not my problem” attitude. Co-verification improves communication between the hardware and software teams Introduction ( 16 ) Hardware/Software co-development environment Verify hardware using real software. Verify software in the context of hardware. Executable image of the application software MEM BFM ISS Processor model in C Cross-compiler Hardware model Application program Target dependent library Simulator Introduction ( 17 ) ISS program Cross compilation Cross compiler is a program in a host computer and generates executable codes for the target machine. Build machine is the machine the toolchain is being built on. Host machine is the machine the toolchain programs (compiler, linker, assembler, and so on) will run on. Target machine is the machine the toolchain builds programs for. Cross compiler is a compiler that builds programs for a machine different than the one the compiler is run on. It runs the result of cross-compiled program. Cross compiler source Compiler User program in C Cross compiler Executable code for target machine P Build machine Host machine Introduction Target machine ( 18 ) ISS: Instruction Set Simulator Instruction set simulator (ISS) is a program that runs on a host machine to executes target machine programs by simulating the effects of each instruction on the target machine. Used for the following areas in the past As a reference model for processor design As a processor model for computer architecture analysis, such as cache study, network traffic, and so on. As a processor model for software development prior to silicon or board. ISS is a software program (environment) which reads microprocessor instructions and simulates its execution. Application ISS (S/W) A program in ARM code ISS ARM ISS in Pentium code Host machine PC Pentium Windows Used for hardware-software codesign/co-development at the present ISS (S/W) Introduction Memory model ( 19 ) H/W HDL simulator C Simulation Limited availability of platform Co-verification using logic simulation requires a logic simulation license for each software engineer. Most companies have only one or two such machines that must be shared by verification engineers and software engineers C or C++ simulation environment To eliminate the need for logic simulation Moreover, C simulation is faster then logic simulation HDL to C translation Tool are now available to take the Verilog and VHDL code and turn it into a C model by translating it into C or SystemC. It generates cycle-based C code, but it is not clear. VCS logic simulator High performance of C model The only way to gain higher performance of C or SystemC simulation is to raise the abstraction level of the model. Engineer can make an abstract model in about 1/10 the time it takes to develop an RTL model and the model should run 100 or 1000 times faster in a C or SystemC environment. Introduction ( 20 ) Methods from software programming perspective (1/2) Memory model Peripheral model GDB ISS Peripheral model Peripheral model Memory model Peripheral model GDB ISS BFM Peripheral model Peripheral model ISS simulation with SW debugging HDL simulator Memory model GDB ISS & HDL simulation with SW & HW debugging Processor model Peripheral model Peripheral model Peripheral model HDL simulator HDL simulation with SW & HW debugging ISS: Instruction-set simulator HDL: Hardware description language GDB: Source-level debugger from GNU BFM: Bus functional model Introduction ( 21 ) Methods from software programming perspective (2/2) GDB Processor model Memory model Peripheral model Peripheral model Peripheral model HDL simulator FPGA (iNCITE) USB 2.0 FPGA & HDL simulation with SW & HW debugging GDB Processor model Memory model Peripheral model Peripheral model Peripheral model FPGA (iNCITE) USB 2.0 FPGA prototype with SW debugging FPGA: Field programmable gate array USB: Universal serial bus iNCITE: FPGA board with host interface through USB (Dynalith Systems) Introduction ( 22 ) Host-Code Mode with Logic Simulation Modeling Processor model: Native compiled software Hardware model: Logic simulator such as HDL simulator or hardware-based simulator Communication channel between two model Inter-Process Communication IPC message passing or shared memory for different host process mapping in a workstation Socket for different workstation mapping Abstracted messages for communication C API and Bus Functional Model Host Software Debugger Native Compiled Software C API Inter-Process Communication (IPC or Socket) Abstracted messages (Read, Write, Interrupt) BFM Logic Simulation with Hardware Design Host-code execution with logic simulation Introduction ( 23 ) ISS with Logic Simulator Processor Modeling with ISS (target-code mode) More realistic simulation of target processor architecture such as cache, MMU, exception handler, etc. Able to understand the context of the bus transactions better In host-code mode, all bus transactions are considered to a single bus transaction. Slower than host-code mode Communication modeling with C API and BFM Transaction-based Interface Cannot simulate the details of port signals of processor Software debugging Not a host debugger, but rather a debugger that can work with the ISS with cross-compiled target code. Target Software Debugger ISS C API Inter-Process Communication (IPC or Socket) Abstracted messages (Read, Write, Interrupt) BFM Logic Simulation with Hardware Design Host-code execution with logic simulation Introduction ( 24 ) ISS with Logic Simulator Cycle-based interface instead of the transaction-based interface Cycle-accurate simulation of bus transactions Exchanges pin values between the ISS and logic simulator on every bus clock cycle. Moving the bus functional model state machine into the ISS Target Software Debugger ISS C BFM Inter-Process Communication (IPC or Socket) Bus Signal Values HDL Bus Shell Logic Simulation with Hardware Design Host-code execution with logic simulation Introduction ( 25 ) RTL Model of CPU with Software Debugging RTL model of processor running on logic simulators Hard macro Used without revealing all of the source code of the design Soft macro Synthesizable Verilog or VHDL Offer better flexibility and eliminate portability issues in the physical design and fabrication process Low simulation speed All system is totally inside the hardware execution engine. A simulation environment for a large SoC typically runs less than 100 cycles/sec. It is not possible to use a software debugger to perform interactive debugging. Acceleration Simulation acceleration and emulation systems are capable of running at much higher speeds. A few hundred KHz up to 1 MHz Possible to interactively debug software running on the RTL model of processor Introduction ( 26 ) RTL Model of CPU with Software Debugging Software debugging A software debugger must be able to communicate with the CPU RTL. To debug software programs, a software debugger requires only a few primitive operations to control execution of a microprocessor. Read and write registers and memory Single step and continue execution Stop, exit gdb Gdb provides an interface and specification called the remote protocol interface that implements a communication channel between the debugger and the target CPU. Target Software Debugger ( gdb configured for the target processor ) Application C code Inter-Process Communication (UART, Socket) gdb remote protocol gdb stub RTL CPU Logic Simulation with Hardware Design gdb connected to the RTL code of the microprocessor Introduction ( 27 ) Evaluation Board with Logic Simulation The microprocessor evaluation board can serve a similar purpose as the ISS. Each is running independently without synchronization or correlation between the two time domains of the board and the logic simulator Since most boards have networking support, a socket connection between the board and the logic simulator can be developed. It is most appealing to software engineers since the performance of the board is very good. Needs customization The drawback is the need to add custom software to the code running on the CPU board to handle the socket connection to the logic simulator. Microprocessor Evaluation Board Inter-Process Communication (Socket) Bus Transaction (read/write) BFM Logic Simulation with Hardware Design Microprocessor evaluation board with logic simulation Introduction ( 28 ) In-Circuit Emulation JTAG connection to microprocessors on emulation system There is a trend for the IP vendors to provide RTL code to the user for the purposes of simulation and synthesis. Most cores used in SoC design today support some kind of JTAG interface for software debugging. JTAG debugger and probe JTAG connection Serial bitstream RTL CPU core Emulation System with Hardware Design JTAG connection to an emulation system Introduction ( 29 ) In-Circuit Emulation Microprocessor test chip + emulation system Useful for hard macro microprocessor IP such as the ARM7TDMI that cannot be mapped into the emulation system JTAG debugging can also be done by connecting to the JTAG port on the chip. CPU core runs at the speed of the emulation system. Cycle-accurate lock-step simulation Able to model the system exactly Able to run faster using emulation technology for long software tests and regression tests Target Software Debugger JTAG connection CPU Chip on a board Emulation System CPU with Shell Hardware Design Signal Values JTAG connection with test chip and emulation system Introduction ( 30 ) In-Circuit Emulation Emulation system with PCI speed bridge Application : verification of a chip that connects to the PCI bus Software engineers are developing device driver for OS such as Windows or Linux. Use a PC to test the software The emulation system provides a PCI board that plugs into the PC. PCI speed bridge bridges the speed differences between the real speed of the PCI bus in the PC (33 or 66MHz) and the slower speed of the emulator. Host Software Debugger PC running Windows or Linux PCI speed bridge board Cables PCI Signal Values HDL PCI Shell Emulation System with Hardware Design PC Emulator Test chip and emulation system Introduction ( 31 ) Co-Verification Metrics Performance (speed) Accuracy Synchronization Type of software to be verified Ability to do hardware debugging (visibility) Ability to do performance analysis Specific vs. general-purpose solutions Software only (simulated hardware) vs. hardware methods Time to create and integrate models: bus interface, cache, peripherals, RTOS Time to integrate software debug tools Pre-silicon compared to post-silicon Introduction ( 32 ) Performance and Accuracy Performance The number one objection to co-verification from software engineers Cycles/sec or instructions/sec Every vender will say that performance is “design dependent”, but with a good understanding of co-verification methods it is possible to get a good feel for what kind of performance can be achieved. Accuracy The number one concern of hardware engineers How is the model verified to guarantee it behaves identically to the device silicon? Does the model contain complete functionality, including all peripherals? Is the model cycle accurate? Are all features of the bus protocol modeled? Can performance data be gathered to ensure system design meets requirements? Will the model accurately model hardware and software timing issues? Introduction ( 33 ) An example SoC development environment OpenRISC-based SoC/embedded system development environment Software development with OpenIDEA Integrated SoC development environment based on open source hardware and software OpenIDEA for software development GUI-based software studio iNSPIRE-Lite for iNCITE SoC hardware generation environment Project Management C/ASM Editing SW Compiling Debugging Hardware development with iNSPIRE-Lite Building SoC hardware Exporting synthesis script Exporting simulation project Exporting emulation project Software-hardware co-simulation/emulation OpenIDEA for SW/HW co-simulation SW/HW co-simulation/co-emulation/prototyping with OpenIDEA OpenIDEA for SW/FPGA coemulation SW/HW co-simulation using ISS and HDL simulator SW/HW co-emulation using ISS and iNCITE Prototyping and SW debugging HDL simulator Hardware prototyping board iNCITE as FPGA and memory board iNCITE-AVREM as application board Introduction ( 34 ) FPGA on the iNCITE References Co-verification of Hardware and Software for ARM SoC Design (Embedded Technology) by Jason Andrews, Newnes Essential Issues in SOC Design: Designing Complex Systems-on-Chip, Chapter-7, SOC PROTOTYPING AND VERIFICATION, by Moo-Kyoung Chung, et al., 2006, Springer. Enhancing Performance of HW/SW Co-Simulation and Co-Emulation by Reducing Communication Overhead, IEEE Transactions on Computers, 2006, Moo-Kyoung Chung, Chong-Min Kyung “Embedded System Design: A Unified Hardware/Software Introduction”, Frank Vahid and Tony Givargis, John Wiley & Sons; ISBN: 0471386782. Copyright (c) 2002. Introduction ( 35 )