Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
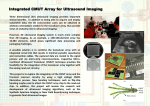
II: Bandwidth of the Doppler Signal as an Estimator
to Detect Left Ventricle Size, Shape and Orientation
and to Select View of Apical Ultrasound Images
Sigve Hovda
and others
Abstract— In apical cardiac ultrasound imaging there are
three standard views of examination; long axis view LA, two
chamber view 2Ch and four chamber view 4Ch. An algorithm
on transthoracical cardiac ultrasound images is implemented
that selects which of these three apical views and left ventricle
LV center, orientation and size. The algorithm is entirely based
on images of an estimator M M SDR, closely related to the
bandwidth estimator which is discussed in part I. The pulse
strategy is duplex and altering from tissue Doppler Imaging
TDI and tissue grey scale imaging. The detection routine can
therefore be examined in the grey scale images. Because of the
cyclic behavior of the blood flow in the heart, it was argued for
in part I to temporally average one heart cycle. The start and
the end time were found from the t-wave on the ECG signal and
the main task of this paper is to examine the inversion of this
averaged image IAI. This image was thresholded at 128 different
levels, so 128 binary images were created, typically showing white
pixels were blood were present. An assumption of the examinator
keeping LV centered was taken, and a region selection routine was
used to estimate LV cavity in all these 128 images. Furthermore
a principal component analysis was used to detect an internal
coordinate system of LV, and the behavior of this coordinate
system as the threshold decreases have given a tool to detect the
type of view and were to place the threshold.
I. I NTRODUCTION
Echocardiography has become one of the most important
tools in diagnosing coronary heart decease, valve deceases and
heart failures. Despite this, most common ultrasound devices
requires not only clinical experience but also technical knowledge to get optimum use of the device. Most examinations
involves strict protocols, adjustment of numerous parameters
and manual selection of landmarks in LV. Automatic detecting
of features in LV is reported by numerous authors. An algorithm for detection of the atrioventricular AV plane and apex
is explained in [1] and an improved version implemented on
GE Vingmed Vivid 7. Another AV plane algorithm is patented
by (). Authors have reported various image processing tools
subsequent to border detection algorithm of endocard (). Even
though automatic detecting of features in LV is an established
field, no article on detecting the type of view has previously
been published. Many applications involves not only knowing
where the detectable landmarks are, but also where and what
angle it is viewed from. For instance from apical view of blood
flow in aorta, it is meaningless to set up a region of interest
unless the view is LA. Furthermore AV plane detection should
involve three points in LA views and two points in other apical
views. Strain rate imaging SRI M-mode in myocardia () should
be set only if the views are apical.
The region of interest is selected in colorflow imaging,
greyscale imaging, tissue Doppler imaging, continuous wave
Doppler, pulsed wave Doppler and sonogram imaging. Many
applications involving tracking the inner wall of LV endocard
[] are semiautomatic requires the user to select landmarks or
points in the ventricle such as AV plane, Apex and the LV
center. It is quite obvious that reliable detection routines for
view point and LV center, orientation and scale would reduce
the number of manual parameters. In addition the protocols
would be simpler and more flexible. Once the inspector gets a
good view of the heart the type of view would be decided, the
file labeled, help messages, region of interest set, sonograms of
tissue Doppler in myocardium displayed, popup menu asking
for CW, PW or colorflow Doppler around the mitral or the
aorta valve etc. Furthermore for 3D imaging systems if the
mitral apparatus is found then it can be visualized using
electronic steering, saving the user from wiggling around in
the 3D space. The ultrasonic devices are getting smaller, more
portable and less experienced users are expected in fields such
as emergency and bed side examinations.
This article limits itself to detection of apical views, hoping
to build a foundation for detection of transthoracical parasternal views and esophagus views. The methods cited above
are all applied to grey scale images and TDI. This algorithm
however uses the newly found estimator M M SDR and other
challenges and advantages are reviled. Finding an appropriate
method for detection have led us to a discussion of the flow
patterns in the heart.
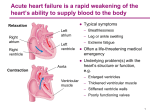
II. F LOW PATTERN IN THE HEART
Even though there are many reasons why signals in the
blood sample have a wide bandwidth, this signal can very
well have narrow bandwidth. In fact a single frame of the
M M SDR data is really not a sharp and reliable image of
the heart. Temporal averaging is essential. The blood flow
pattern in the heart behaves in a cyclic manner through the
heartbeat. In the ejection phase of the systole the velocity
field accelerates towards aorta and much turbulent flow is
found in the top half of the ventricle, most likely because the
ventricle contraction causes blood to be squeezed out of the
small pockets in the trabeculae network. After the ejection the
ventricle expands very quickly due to the elastic recoil effect
of the heart muscle and the pressure that has been build up in
the left atria. This causes lateral (perpendicular to ultrasound
beam) acceleration near endocard. Also in the filling process
the velocity components towards apex (approximately along
the beams) decelerates. Turbulence on the backside of the mitral valve is discovered [ref]. In the relaxation stage of diastole
spatial variations of the flow pattern is most prominent. (This
has an influence on the transition time (the time a scatter is
observed) and broadens therefore the bandwidth estimate.) In
the atrium systole a final volume of blood is pushed into LV
causing a new burst of turbulence.
To summarize the spatial variation in turbulence, lateral
velocities, local and spacial acceleration and velocity field in
the aliased range is behaving cyclic through the heartbeat. This
led us to investigate the time averaged image over one heart
cycle in more depth. Despite this averaging over the systole
will give a better estimate of septal wall and apex, while
averaging over the diastole finds the postoral wall better as
discussed in part one. Now let us proceed to the main task of
this paper which is to investigate the inverse of this averaged
image IAI. Figure XX shows such IAI of three hearts from
three different views.
III. I MAGE PROCESSING OF IAI
IAI is a grey level image from 0 to 255, where low
values indicates tissue and high values indicates blood. The
image is divided into 128 subsets Vα of IAI. V0 contains
the points with grey level 127 and above, corresponding to
M M SDR = 0.5 and lower, V1 contains points with grey level
126 and above and so on. A connected component method on
all Vα around a start point Pstart is used to find estimates
of LV cavity. These connected components Uα ’s are therefore
subsets of the Vα ’s. To detect LV cavity it is assumed that the
examinator is keeping LV roughly centered, which experienced
users do quite instinctively. Pstart is therefore the first point
in Vα being element of Vα from 4 cm down the center beam.
The start at 4 cm is chosen since the bandwidth (and therefore
M M SDR experiences artifacts in the extreme near field [2].
If no point is found before 10 cm, than Uα contains no points.
In the connected component method an eight adjacency
scheme is used meaning that a point p is said to be 8-adjacent
of q if p and q are elements of Vα and p is element of N8 (q)
which is shown in figure XX. The procedure is iterative and
involves placing points into two arrays and updating the image
of Vα . Array one consist of the points that are found to be in
Uα at this iteration and array two consist of the points found
to be in Uα from only the last iteration. The routine works as
follows: Pstart is sent to array one. The 8-adjacent of Pstart
are found and added to array one. Also these points are set to
be the content of array two. Now the image of Vα is updated
and the points in array two are set to zero in this image. This
is done to insure that no points are selected twice. The next
iteration starts with finding the 8-adjacent points of all points
in array two. The routine terminates at the iteration where no
points are sent to array two and array one contains Kα points
xα,k . Note that the connected component U0 of V0 is done
first, than U1 of V1 and so on. This makes the algorithm more
efficient since calculating Uα writes the points of Uα−1 into
array one, labels them zero in the image of Vα and the last
points found in Uα−1 into array two.
The next part in this algorithm is to do principal component
analysis to create an internal coordinate system of the Uα ’s for
every α. This involves calculating expected value of xα,k mα
and the covariance matrix Cα :
Kα
1 X
xα,k
mα = E{xα,k } =
Kα
(1)
k=1
Cα =E{(xα,k − mα )(xα,k − mα )T }
=
Kα
1 X
(xα,k − mα )(xα,k − mα )T
Kα
(2)
k=1
An approximation of (2) explained in [3] is
Cα =
Kα
1 X
xα,k xα,k T − mα mα T
Kα
(3)
k=1
but this is not used since the cputime is not essential in
this study. Note that Cα is a two by two matrix and its
eigenvectors eα,1 and eα,2 defines the directions of the internal
coordinate system and mα is the center. The two eigenvalues
λα,1 and λα,2 are the variances of the distribution of xα,k .
The square root of these two eigenvalues is therefore a good
measure of the ventricle size. If the distribution of xα,k in
the eα,1 direction is roughly Gaussian distributed than more
than 95 percent
of the eα,1 components of xα,k would be
p
inside a 4 λα,1 range centered at mα . This is a general
property of the Gauss curve and can be found by integrating
the Gaussian probability density function from negative two
standard deviations to positive two standard deviations. The
same
p argument holds in the direction of the short axis, so
4pλα,1 is an estimate for the long axis of LV cavity and
ofpLV’s short axis Figure XX. A table
4 λα,2 is an estimate
p
of mα , eα,1 , 4 λα,1 , 4 λα,2 is made corresponding to the
different estimates of LV center, direction of long axis, length
of long axis and length of short axis. The behavior of these
parameters can therefore be examined as a function of the
different threshold levels. This examination have given insight
not only where the threshold should be set but also which type
of view this is.
IV. R ESULT
Investigating 22 4Ch views, 10 2Ch views and 18 LA views
of 10 healthy hearts made it possible to classify behavior of
the table discussed above. In 4Ch images a severe clockwise
rotation happens when LV connects with RV. This usually
happens in the lower part of the septal wall, since the variance
increases in fast moving tissue. The final threshold is set to 0.5
lower than the threshold of severe change. In LA images the
rotation is counter clockwise, since RV is now on the ”right
side” of LV figure XX. A threshold 0.05 below this is then
selected. In the 2Ch images these severe change does happen
before after 0.9 and it is therefore difficult to set the final
threshold. A practical solution is to pick the threshold from the
4Ch image of the heart. If implemented the standard procedure
could be to image 4Ch view first so this parameter could be
set automatically.
R EFERENCES
[1] C. Storaa, A. Grandell, T. Gustavi, A. H. Torp, B. Lind, and L. . Brodin,
“Simple algorithms for the automatic detection of predefined echocardiographic localisations,” in . International Federation for Medical and
Biological Engineering (IFMBE) Proceedings. The 12th Nordic Baltic
Conference on Biomedical Engineering and Medical Physics, Berlin /
New York, feb 2002, pp. 106–107.
[2] B. A. Angelsen, Ultrasound Imaging Wawes, Signals and Signal Processing. Trondheim, Norway: Emantec, 2000, ch. 7.4 and 9.
[3] R. C. Gonzalez and R. E. Woods, Digital Image Processing. New Jersey,
US: Prentice Hall, Inc, 2001, ch. 11.4.