Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
1
A Relaxed AC Optimal Power Flow Model
Based on a Taylor Series
Hui Zhang, Student Member, IEEE, Vijay Vittal, Fellow, IEEE, Gerald T. Heydt, Life Fellow, IEEE,
and Jaime Quintero, Member, IEEE
School of Electrical, Computer and Energy Engineering, Arizona State University, Tempe, AZ 85281, USA
{hui.zhang}, {vijay.vittal}, {heydt}, {jaime.quintero.1}@asu.edu
Abstract—Model accuracy plays an important role in optimal
power flow (OPF) studies. However, the traditional DC model
used in OPF is potentially inaccurate in many cases. This paper
presents a relaxed ACOPF model based on a Taylor series. The
proposed model includes reactive power and off-nominal bus
voltages. A mixed-integer linear programming (MILP) model is
developed for modeling network losses and the possible relaxations of the MILP model are discussed. Conditions when the
relaxations are exact are given and proved. Simulation results
show that the proposed model is computationally effective and
provides a better approximation for the original AC network.
Index Terms— AC optimal power flow, convexification, loss
modeling, piecewise linearization, relaxation, Taylor series.
NOMENCLATURE
ag
bg
bk
bk0
cg
ck
gk
k(l)
L
Pk
PDd
PGg
PGgmax
PGgmin
PLk
Qk
QDd
QGg
QGgmax
QGgmin
QLk
Skmax
Vi
ΔVi
ΔVmax
ΔVmin
uk(l)
δk
θk
θmax
Quadratic cost coefficient of generator g
Linear cost coefficient of generator g
Series admittance of branch k, a negative value
Shunt admittance of branch k, a positive value
Fixed cost coefficient of generator g
Investment cost of the branch k
Conductance of branch k, a positive value
The slope of the lth piecewise linear block
Number of linear blocks
Active power flow on branch k
Active power demand of load d
Active power generated by generator g
Maximum active power output of generator g
Minimum active power output of generator g
Active power loss on branch k
Reactive power flow on branch k
Reactive power demand of load d
Reactive power generated by generator g
Maximum reactive power output of generator g
Minimum reactive power output of generator g
Reactive power loss on branch k
MVA rating of branch k
Bus voltage magnitude in p.u. at bus i
Voltage magnitude deviation from 1 p.u. at bus i
Upper bound on the voltage magnitude deviation
Lower bound on the voltage magnitude deviation
Binary variable for the lth linear block
Binary variable for modeling |θk|
Phase angle difference across branch k
Maximum angle difference across a branch
θk+, θk–
Δθk(l)
Nonnegative slack variables used to replace θk
The lth linear block of θk
I.
INTRODUCTION
The objective of the optimal power flow (OPF) problem is
to minimize the total energy cost in the power grid subject to
the system and resource constraints. These constraints include
bus voltages magnitudes, angles, line flows as well as
generator outputs. The AC model of the OPF problem
(ACOPF) uses the nonlinear AC power flow equations in the
constraints. Among the solution techniques for the ACOPF
problems, Newton’s method, due to its fast convergence near
the solution, was widely adopted in early literature [1]-[2].
However, Newton’s method has difficulties in handling
inequality constraints, and the performance of Newton’s
method also depends largely on the starting point. As
algorithms developed, the interior point method based
algorithms [3]-[5] have become the mainstream algorithms for
solving ACOPF problems.
Despite the development of nonlinear algorithms,
obtaining a robust solution for large-scale ACOPF problems
efficiently is still challenging. Therefore, for problems such as
real time economic dispatch where the speed is a primary
concern, a DC model is often used. The DC model of the OPF
problem (DCOPF) is a linearized version of the ACOPF
model [6]. It assumes fixed voltage magnitude at every bus as
well as negligible reactive power and network losses. Thus,
the original nonconvex ACOPF model can be relaxed to a
quadratic programming (QP) model (assuming that generators
have quadratic cost curves), which is convex and easier to
solve. Due to the approximations made, the accuracy of the
DC model may be poor in some cases [7]. Endeavors have
been made recently to search for better approximations to the
AC model. Some related work is summarized as follows.
The core concepts of the work being done are convexification and relaxation. The purpose of formulating a convex
model is to obtain the global optimal solution. During the
convexification process, if certain conditions do not hold,
then relaxations may be needed. A linear programing approximation to the AC power flow equations was presented in [8],
where the cosine term in the power flow equations was
piecewise linearized and other nonlinear terms are approximated by the Taylor series. In [9], the ACOPF problem was
reformulated using a semi-definite programming (SDP) model and solved by the interior point method. A zero-duality
SDP model based on the Lagrange dual of the ACOPF problem was proposed in [10]. For the zero-duality to hold, small
2
modifications to the original systems may be needed. Studies
including branch flow model [11] and branch-and-bound algorithms [12]-[13] have been conducted recently to further
explore the zero-duality feature. Compared to the DC model,
the models presented in the above work provide better approximations to the ACOPF model. However, these models
are still incomplete and require further investigations. For
example, the zero-duality may not hold when certain constraints, such as line flow or lower bounds on reactive power
generation, are enforced [13]-[14]. In addition, these models
are complicated and may not be easily extended to other applications such as transmission expansion planning. This paper develops a relaxed OPF model based on a Taylor series.
The proposed model provides a better approximation to the
AC network by retaining reactive power, off-nominal bus
voltage magnitudes as well as network losses. Contributions
of this work mainly include the following:
A relaxed ACOPF model with a mixed-integer linear
programing (MILP) based loss model.
Relaxations of the MILP-based loss model and proofs of
the conditions when the relaxations are exact.
The rest of this paper is organized as follows: Section II
presents the relaxed ACOPF model. Section III investigates
the loss model and its relaxations. Simulation results are
presented in Section IV. Conclusions are drawn in Section V.
II.
THE RELAXED ACOPF MODEL
The proposed relaxed ACOPF model is derived in this
section. The derivation is based on the following assumptions:
Similar to the standard ACOPF model, the proposed model takes the following form:
min f (x)
(1a)
h(x) c
(1b)
g(x) b
(1c)
T
(1d)
.
In the above model, bold face refers to vectors. The objective function (1a) is the summation of the quadratic cost functions of each generator and has the following form:
:i
(3a)
QG Q 0.5QL QD
d
:i
(3b)
gi
g
bus i
k
ki
k
ki
k
ki
Pkij
Cg PGg ag PGg2 bg PGg cg .
d i
k
ki
d i
Pkji
rk + jxk
bus j
Qkji
Qkij
0.5(PLk + jQLk)
0.5(PLk + jQLk)
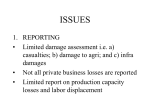
Figure 1. Modeling of network losses as bus fictitious demand
The inequality constraints (1c) represent the apparent
power flow limit on each branch:
Pk2 Qk2 (Skmax )2 .
(4)
Notice that (4) is a set of second order cone constraints.
This type of constraint is still convex and can be handled by
linear solvers such as Gurobi [19]. However, if a solver
requires the constraints to be strictly linear, a piecewise
linearized version for (4) can also be derived.
Neglecting the effects of off-nominal transformer turns
ratios and phase shifters yield the full AC power flow through
branch k as follows,
Pk Vi 2 gk VV
i j g k cos k bk sin k
(2)
The equality constraints (1b), which are further elaborated
in (3), represent the active and reactive power balance equations at every bus. In the proposed model, the terms corresponding to network losses PLk and QLk are explicitly added
to the nodal balance equations. Define bus i and bus j to be
the “from” bus and the “to” bus of branch k. As shown in Fig.
1, the losses on the branch are split in half and attached to the
(5a)
(5b)
Rewriting the bus voltage magnitude as,
Vi 1 Vi .
(6)
Based on the assumptions, ΔVi is expected to be small. Substituting (6) into (5) and neglecting higher order terms,
Pk 1 2Vi gk 1 Vi V j
subject to
d
g
gi
2
The angle difference across a branch is small so that
sin(θk) ≈ θk and cos(θk) ≈ 1 can be applied.
x PGg , QGg ,Vi ,i
PG P 0.5PL PD
Qk Vi bk bk 0 VV
i j bk cos k g k sin k .
All bus voltage magnitudes are close to 1.0 p.u.
xmin x xmax
two terminal buses. The expressions of PLk and QLk will be
elaborated further in Section III.
g
k
bkk
(7a)
Qk 1 2Vi bk bk 0 1 Vi V j bk gkk . (7b)
Notice that (7) still contains nonlinearities. However, since
ΔVi, ΔVj and θk are expected to be small, the products ΔViθk
and ΔVjθk can be treated as second order terms and hence
negligible. Therefore, the linearized power flow through
branch k metered at bus i are obtained as follows,
Pk Vi V j gk bkk
Qk 1 2Vi bk 0 Vi V j bk gkk .
(8a)
(8b)
The bounds on variables (1d) include upper and lower limits on bus voltage magnitudes and angles as well as the generator active and reactive outputs:
Vi min Vi Vi max
max
k
max
(9a)
(9b)
3
PGgmin PGg PGgmax
QGg QG
min
g
max
g
QG
(9c)
.
θk 2
(9d)
The complete relaxed ACOPF model is described by (2)(4) and (8)-(9).
III.
k(L)
NETWORK LOSSES MODELING
As shown in (3), the network losses can be included in the
proposed model. This section derives the network losses PLk
and QLk and investigates the possible relaxations. Applying
the second order approximation of cosθk and neglecting high
order terms, the active and reactive network losses can be
approximated as,
PLk gkk2
(10a)
QLk bk .
(10b)
2
k
Notice that (10a) and (10b) are nonconvex. The following
two approaches are developed to render them convex.
A. Piecewise Linearized Relaxation
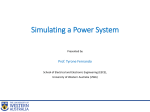
The piecewise linearized model is to approximate θk2 by a
series of linear blocks. Since (10a) and (10b) are nonconvex,
certain line losses in the resultant linear model may fail to
converge to the correct value and cause the “fictitious loss”
problem as pointed out in [15] and [16]. The following MILP
model introduces a series of binary variables to prevent the
presence of the fictitious losses.
L
PLk g k k (l ) k (l )
θkmax
k(1)
Δθk(1)
|θk|
…
Δθk(L)
Figure 2. Piecewise linearization of θk2
The above MILP model eliminates the fictitious losses by
adding the binary variables. These binary variables, however,
could prevent the resultant model from being solved efficiently. In fact, the MILP model can be relaxed to a more efficient
linear programming (LP) model by discarding the binary variables δk from (11h) and (11j) and retaining only (11a)-(11j).
When certain conditions are met, this relaxation is exact. The
condition is investigated in the following. First, let ℒ(x) be
the Lagrangian function.
(x) f (x) φT c h(x) μT b g(x)
where, φ and μ represent the dual variables associated with
the equality and inequality constraints respectively. Bounds
on variables are converted to inequality constraints and included in g(x). The dual variables needed are given in (11a)
to (11j). According to Lagrangian duality theory, the dual
variables are non-positive for “≤” constraints, and are free of
sign restriction for equality constraints. All terms are moved
to the right-hand side of the constraints. The optimality condition requires the following constraints hold simultaneously,
: k
(11a)
QLk bk k (l ) k (l )
:k
(11b)
PLk 0.5(i j ) k 0
k k
: k
(11c)
QLk 0.5(i j ) k 0
l 1
L
l 1
k
L
l 1
k
(l ) k k
: k
k (l ) 0, l 1,..., L
k (l )
max
:
L , l 1,..., L
0
k
(11d)
l
k
(11e)
:
l
k
(11f)
:k
(11g)
(11h)
k kkmax
:k
(11i)
k 0
: k
k (1 k )kmax
: k
(11j)
k (l ) k (l 1), l 2,..., L
(11k)
max
max
L k (l 1) uk (l 1)
L , l 2,..., L (11l)
max
k (l ) 1 uk (l 1)
L l 2,..., L
(11m)
k (l ) (2l 1) max L .
+
–
In (11c), θk is replaced by slack variables θk and θk . Binary
variable δi together with (11g) to (11j) ensure the right-hand
side of (11d) equals the absolute value of θk, i.e., at most one
of θk+ and θk– can be nonzero. Constraints (11k)-(11m) guarantee that the linear block on the left will always be filled up
first to eliminate fictitious losses. The piecewise linearization
is illustrated in Fig. 2.
(12a)
(12b)
(12c)
k (l ) ( gk k bk k )k (l ) k 0 (12d)
l
k
l
k
k k k k k 0
(12e)
k k k k 0
(12f)
k
Theorem 1: If (gkγk – bkωk) > 0, then the MILP model and
the LP model are equivalent.
Proof: Without losing generality, consider Δθk(l) to be the
lth linear block for θk where 1 < l < L. If 0 < Δθk(l) < θmax/L,
then by complementary slackness (CS), (12d) becomes:
( gk k bk k )k (l ) k
(13a)
Let Δθk(l – m) and Δθk(l + n) be any linear block before and
after Δθk(l) respectively, where 1 ≤ m < l and 1 ≤ n ≤ (L – l),
then for these two linear blocks, (12d) gives:
( gk k bk k )k (l m) k kl m kl m
( gk k bk k )k (l n) k
l n
k
l n
k
(13b)
(13c)
Provided the OPF model is feasible, (13a)-(13c) must have a
solution. Since (gkγk – bkωk) > 0 and k(L) > k(l) > 0, by CS,
kl m kl n 0 . This indicates that any linear block before
4
Corollary 1: For an OPF model that only considers active
power constraints, if the sum of the locational marginal price
(LMP) at two terminal buses of a branch is positive, then the
LP relaxation is exact.
250
200
k k
For the piecewise linearized model, Theorem 1 provides
an approach to identify the branches where the fictitious losses may be created. Binary variables are needed only for these
branches instead of all the branches in the system. Based on
Theorem 1, for an OPF model that only considers the active
power constraints, the following corollary can be derived.
150
kk
Equation (13a) shows that βk > 0. By CS, it can be observed from (12e) and (12f) that if either θk+ or θk– is nonzero,
then the other must be at its lower bound, i.e., zero. This indicates that θk is either equal to θk+ or –θk– depending on the sign
of θk. Hence, Theorem 1 is proved.
■
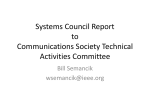
can observed from the figure, (gkγk – bkωk) values of all the
branches are positive except for branch 16, which is zero.
According to Theorem 1, the LP relaxation should be exact
and no fictitious losses should be created except for branch
16. The active power loss for each branch is plotted in Fig. 4
using (11a) and (10a) respectively. In the figure, fictitious
losses are observed at branch 16. This is because with (g16γ16
– b16ω16) equals to zero, the piecewise linear model fails to
select the correct linear blocks for branch 16 and causes excessive losses which will not be observed in reality. For other
branches, since (gkγk – bkωk) > 0, the LP relaxation is exact
and therefore no fictitious loss is created.
100
g r -b w
Δθk(l) must be at its upper bound, i.e., Δθk(l – m) = θmax/L and
any linear block after Δθk(l) must be at its lower bound, i.e.,
Δθk(l + n) = 0. Referring to Fig. 2, the linear blocks will be
filled continuously starting with the leftmost one.
Proof: LMPs are the dual variables associated with the
active power nodal balance constraints, i.e., λi. If reactive
power is neglected, then the term –bkωk will drop out from
(12d). From (12b), it is clear that γk is positive. If gk > 0, then
gkγk > 0 and according to Theorem 1, the LP relaxation is exact. If gk = 0, then the active power loss for that branch is
always zero. Hence, Corollary 1 is proved.
■
50
0
(MW)
4
(14)
This inequality relaxation is exact when (14) is binding. The
following condition need to be satisfied.
(15)
In (15), it is easy to show that if (λi + λj) > 0, then γk > 0.
By CS, (14) must be binding.
■
IV.
SIMULATION RESULTS
The proposed model and its relaxations are evaluated in
this section. All models are programmed in AMPL [18]. The
solvers used are Gurobi 5.0.2 [19]. The computer used for
simulation has an Intel E8500 CPU with 3.2 GB of RAM.
First, a case is presented to verify Theorem 1. The test system is constructed based on the IEEE 24-bus RTS system
[23] with modified generator cost data. The system has 38
branches. The OPF is solved using the relaxed LP model presented in Section III. The LMP is positive at every bus. The
(gkγk – bkωk) value of each branch is plotted in Fig. 3. As one
30
35
Ploss by (10a)
Fictitious
losses
3
2
0
0
5
Proof: Let ℒ be the Lagrangian function and consider (14),
then (12b) can be rewritten as:
PLk 0.5(i j ) k 0
15
20
25
Line number
1
Theorem 2: If the sum of the LMPs at the two terminal
buses of a branch is positive, then (14) is binding.
10
Ploss by (11a)
loss
: k
5
5
P
PLk gk
0
Figure 3. (gkγk – bkωk) value of each branch
B. Quadratic Inequality Relaxation
If reactive power losses are neglected, i.e., (10b) is removed, then (10a) can be relaxed using the following inequality constraint,
2
k
g16r16 - b16w16 = 0
10
15
20
25
Line number
30
35
Figure 4. Active power loss of each branch
As shown in the Table I, the LP model creates 8.9 MW
fictitious losses at branch 16, whereas the full MILP model
and the reduced MILP model are free of fictitious losses. In
terms of simulation time, the LP model is the fastest among
the three models, which is solved in less than 0.1 s. The full
MILP model is solved in 2.3 s and this time is reduced by
35% if the reduced MILP model is used.
TABLE I.
Loss model1
Full MILP
Reduced MILP
LP
1.
2.
COMPARSION OF DIFFENENT LOSS MODELS
Problem
Type2
MISOCP
MISOCP
SOCP
Fictitious losses
(MW)
0
0
8.9 (at branch 16)
Simulation
time (s)
2.3
1.5
< 0.1
Full MILP model: binary variables are added to every branches.
Reduced MILP model: binary variables are only added to branches with (gkγk – bkωk) = 0
MISOCP: Mixed-integer second order cone programming.
SCOP: Second order cone programming
5
The proposed model and its relaxations are also applied to
multiple test cases [20] and the results are reported in Table
II. The number of linear blocks used is 40. It can be observed
that for all test cases, the optimal solutions obtained from the
proposed model provide good approximations to the full
ACOPF solutions. The proposed model is also computationally efficient. All test cases are solved within 0.6 s.
TABLE II.
Test
cases
IEEE 14
IEEE 24
IEEE 39
IEEE 57
IEEE 118
[5]
[6]
[7]
[8]
ACCURACY OF THE PROPOSED MODELS
Piecewise linearized
loss model
Gap†
Time
Objective
(%)
(s)
8067
0.2
0.06
63397
0.07
0.11
41876
0.03
0.17
41497
0.6
0.27
129612
0.04
0.55
Quadratic inequality
loss model
Gap†
Time
Objective
(%)
(s)
8094
0.3
0.06
63352
< 10–6
0.09
41861
< 0.01
0.16
41448
0.7
0.22
129471
0.1
0.52
† Gap is the percentage mismatch between the objective values given by the proposed models and the
full ACOPFs solution using MATPOWER [20].
V.
[9]
[10]
[11]
[12]
[13]
CONCLUSIONS
This paper develops a relaxed OPF model based on a Taylor series. The proposed model retains the reactive power,
off-nominal bus voltage magnitudes as well as network losses. A MILP-based loss model is developed to eliminate the
fictitious losses. Relaxations of the MILP model are investigated. It is proved that the relaxations are exact if the system
meets certain specified conditions. Based on the results in this
paper, the following conclusions are drawn:
[14]
[15]
[16]
In the piecewise linear model, the branches that may create fictitious losses can be identified. Binary variables
are only needed for these branches instead of all the
branches in the system.
[17]
In the piecewise linearization model, even if the all the
LMPs are positive, the fictitious losses may still be present if the reactive power losses are considered.
[19]
If reactive power losses are neglected, then the quadratic
inequality relaxation is exact for active power losses.
Inclusion of reactive power and the off-nominal bus voltage magnitudes improves the model accuracy. The proposed model is computationally efficient and provides a
better approximation to the full ACOPF model.
REFERENCES
[1]
[2]
[3]
[4]
H. W. Dommel, and W. F. Tinney, “Optimal power flow solutions,”
IEEE Trans. Power App. Syst., vol. PAS-87, no. 10, pp. 1866–1876,
Oct. 1968.
D. I. Sun, B. Ashley, B. Brewer, A. Hughes, and W. F. Tinney, “Optimal power flow by Newton approach,” IEEE Trans. Power App. Syst.,
vol. PAS-103, no. 10, pp. 2864-2880, Oct. 1984.
H. Wei, H. Sasaki, J. Kubokawa, and R. Yokoyama, “An interior point
nonlinear programming for optimal power flow problems with a novel
data structure,” IEEE Trans. Power Syst., vol. 13, no. 3, Aug. 1998.
W. Yan, J. Yu, D. C. Yu, and K. Bhattarai, "A new optimal reactive
power flow model in rectangular form and its solution by predictor corrector primal dual interior point method," IEEE Trans. Power Syst., vol.
21, no. 1, Feb. 2006.
[18]
[20]
[21]
[22]
[23]
H. Wang, C. E. Murillo-Sánchez, R. D. Zimmerman, and R. J. Thomas,
“Computational issues of market-based optimal power flow,” IEEE
Trans. Power Syst., vol. 22, no. 3, pp. 1185-1193, Aug. 2007.
O. Alsac, J. Bright, M. Prais, and B. Stott, “Further developments in
LP-based optimal power flow,” IEEE Trans. Power Syst., vol. 5, no. 3,
pp. 697-711, Aug. 1990.
B. Stott, J. Jardim, and O. Alsac, “DC power flow revisited,” IEEE
Trans. Power Syst., vol. 24, no. 3, pp. 1290–1300, Aug. 2009.
C. Coffrin, and P. V. Hentenryck, “A Linear-programming approximation of AC power flows,” June 2012, [Online]. Available:
http://arxiv.org/abs/1206.3614.
X. Bai, H. Wei, K. Fujisawa, and Y. Wang, “Semidefinite programming for optimal power flow problems,” Intl J. of Electrical Power &
Energy Systems, vol. 30, no. 6-7, pp. 383–392, July-Sept. 2008.
J. Lavaei, and S. Low, “Zero duality gap in optimal power flow,” IEEE
Trans. Power Syst., vol. 27, no. 1, pp. 92–107, Feb. 2012.
M. Farivar, and S. Low, “Branch flow model: relaxations and convexification,” Nov. 2012, [Online]. Available:
http://arxiv.org/pdf/1204.4865.pdf.
D. T. Phan, “Lagrangian duality and branch-and-bound algorithms for
optimal power flow,” Operations Research, vol. 60, no. 2, pp. 275–285,
March-April 2012.
A. Gopalakrishnan, A. U. Raghunathan, D. Nikovski, and L. T. Biegler,
"Global optimization of optimal power flow using a branch & bound
algorithm,” Nov. 2012, [Online]. Available:
http://numero.cheme.cmu.edu/uploads/globalOptBBOPF_v6(1).pdf.
B. Lesieutre, D. Molzahn, A. Borden, and C. L. DeMarco, “Examining
the limits of the application of semidefinite programming to power flow
problems,” in Proc. of the Allerton Conf. on Comm., Ctrl. and Computing, Sept. 2011.
P. Sánchez-Martín, and A. Ramos, “Modeling transmission ohmic
losses in a stochastic bulk production cost model,” Oct. 1997, [Online].
Available: http://www.iit.upcomillas.es/aramos/papers/losses.pdf.
R. Palma-Benhke, A. Philpott, A. Jofré, and M. Cortés-Carmona,
“Modeling network constrained economic dispatch problems,” Optimization and Engineering, Springer, Oct. 2012.
Z. Hu, H. Cheng, Z. Yan, and F. Li, “An iterative LMP calculation
method considering loss distributions,” IEEE Trans. Power Syst., vol.
25, no. 3, pp. 1469-1477, Aug. 2010.
R. Fourer, D. M. Gay, and B. W. Kernighan, AMPL: A Modeling Language for Mathematical Programming, 2nd edition, Florence, KY:
Duxbury Press, 2002.
Gurobi Optimization, “Gurobi optimizer reference manual,” [Online].
Available: http://www.gurobi.com.
R. D. Zimmerman, C. E. Murillo-Sánchez, and R. J. Thomas,
“Matpower: steady-state operations, planning and analysis tools for
power systems research and education,” IEEE Trans. Power Syst., vol.
26, no. 1, pp. 12-19, Feb. 2011.
D. G. Luenberger, and Y. Ye, Linear and Nonlinear Programming (3rd
ed.), vol. 116, Springer, 2008.
G. Andersson, Modeling and Analysis of Electric Power Systems, ETH
Zurich, Sept. 2008.
IEEE RTS Task Force, “The IEEE reliability test system-1996,” IEEE
Trans. Power Syst., vol. 14, no. 3, pp. 1010-1020, Aug. 1999.
Hui Zhang (S’09) received the B.E. degree from Hohai University, Nanjing, China, in 2008 and the M.S. degree from Arizona State University,
Tempe, AZ, in 2010. He is currently pursuing the Ph.D. degree at Arizona
State University, Tempe.
Vijay Vittal (S’78–F’97) received the Ph.D. degree from Iowa State
University, Ames, IA, in 1982. He is currently the Director of the Power
Systems Engineering Research Center (PSERC).
Gerald T. Heydt (S’62–M’64–SM’80–F’91–LF’08) received the Ph.D.
degree in electrical engineering from Purdue University, West Lafayette, IN,
in 1970. He is a Regents’ Professor at Arizona State University, Tempe.
Jaime Quintero (M’06) received the Ph.D. degree in electrical engineering from Washington State University, Pullman, WA, in 2005. Currently, he
is a postdoctoral researcher at Arizona State University, Tempe.