Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electromigration wikipedia , lookup
Ferromagnetism wikipedia , lookup
Crystal structure wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Shape-memory alloy wikipedia , lookup
Creep (deformation) wikipedia , lookup
Fracture mechanics wikipedia , lookup
Cauchy stress tensor wikipedia , lookup
Hooke's law wikipedia , lookup
Radiation damage wikipedia , lookup
Stress (mechanics) wikipedia , lookup
Viscoplasticity wikipedia , lookup
Fatigue (material) wikipedia , lookup
Deformation (mechanics) wikipedia , lookup
Viscoelasticity wikipedia , lookup
Paleostress inversion wikipedia , lookup
Strengthening mechanisms of materials wikipedia , lookup
Lecture 22: The mechanism of
plastic deformation, part 2
PHYS 430/603 material
Laszlo Takacs
UMBC Department of Physics
Fracture
• Brittle: There is very little plastic deformation preceding failure.
In a uniform tensile sample it happens perpendicularly to the
loading direction, induced by tension rather than shear.
• Ductile: Substantial plastic deformation before failure. The direct
cause is shear. Geometry depends on the material and
conditions:
– Slip at about 45° (or preferred slip direction) until failure (typical in
single crystals.)
– Necking to a point (very ductile polycrystals.)
– “Cup and cone” in less ductile polycrystals. After some necking,
failure starts inside and propagates at about 45° outward.
Failure always happens much before the theoretical tensile strength is
reached; it always begins at faults.
Technical materials always contain faults, e.g.
microcracks. Why don’t they immediately
result in failure?
Create an elliptical microcrack in an infinite plate
under uniform tension.
1.
It releases energy due to decreased
deformation:
Uelastic = -c22/E
2.
It requires surface energy
Usurface = 4c
Uelastic + Usurface has a maximum at
ccrit = E/2
Microcracks smaller than this will heal rather than
increase. Turned around, if a microcrack of
length 2c exists inside the plate (or a notch of
length c on the edge), crack propagation
requires a minimum stress of
crit = (E/c)1/2
2c
The primary mechanism of plastic deformation is slip due to
dislocation motion. The required shear stress (Peierls stress):
2 d
2G
P
exp
1 b
1
Which slip system is active depends on the crystal structure:
Fcc:
{1 1 1}<1 1 0>; often split into parallel partials.
Hcp:
{0 0 0 1}<1 1 -2 0> always available;
several others, if c/a < 1.63.
Bcc:
{1 1 0}<1 1 1> is the best, but other slip planes
with the same slip direction are close.
More complex structures: Larger Burger’s vector makes
slip difficult, material is usually brittle.
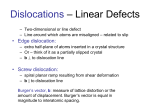
The interaction of dislocations
• Dislocations interact via their elastic stress
fields. Need to know:
– Need to know the force acting on a dislocation due
to a stress field
– The stress field produced by a dislocation
• Parallel dislocations repel, attract, shift each
other
• Dislocations on different slip planes must cut
through each other
Work of external stress affecting the slip: W = ( l1 l3) b
Work of force acting on the dislocation: W = (F l3) l1
Compared
F = b,
where is an external stress.
In general geometry
F = ( b) x s
(F is force per unit length.)
Peach-Koehler equation.
Except for a core about as
wide as a single line of
atoms, a dislocation can be
represented with its elastic
stress field.
Edge dislocation: Strain is
radial.
Screw dislocation: Strain is
parallel to the dislocation
line.
Strain goes to zero far from
the dislocation line. With this
conditions the stress field
can be evaluated.
For example the stress field of an edge
dislocation in the z direction is
Gb sin [2 cos(2 )]
xx
2 (1 )
r
Gb cos cos2
xy
2 (1 )
r
Here is the asimuthal angle in
cylindrical coordinates.
Combining this with the P-K equation
for parallel dislocations:
xx xy 0 b 0
F12 xy yy 0 0 0
0
1
0 zz
0
xx b 0
xy b 0
0
1
xy b
b
xx
0
The 45° lines are unstable, dislocation move away from there.
The x component shows that dislocations in the same slip plane ( = 0°) repel
other, F = b >0. They form a train of dislocations.
each
x
xy
The y component aligns dislocations into small angle grain boundaries.
A general deformation requires
that not all dislocations are
parallel and they move across
each other on different slip
planes. This requires extra
work; a dislocation always
moves the most freely in a
perfectly periodic lattice:
• Crossing dislocations
create jogs in the
dislocation lines. (A jog is
a step of the dislocation
line out of the slip plane.
Forming it requires
energy.)
• Some mobile dislocations
contained in slip planes
combine into a locked
dislocation that is not
mobile (Lomer lock).
The stages of strain hardening
• Stage I: Dislocation density is low, dislocations move long
distances along the primary slip plane without meeting an
obstacle.
• Stage II: Initially few dislocations exist in other slip systems, but
they start to lead to cross-slips and locks, impeding dislocation
motion. If dislocations are rendered immobile, new dislocations
must form to continue the deformation. The dislocation density
and the stress increase quickly.
• Stage III: Cross slip of screw dislocations becomes important. It
is a way to avoid obstacles and also results in the annihilation of
some dislocations. The strain hardening rate gets smaller.
The strain hardening rate can be characterized by = d/d. The
fastest strain hardening (in stage II) is about = G/300 for most
metals.
A dislocation can overcome an obstacle by increased shear stress alone, or
thermal activation can help. Dislocation motion is easier at higher
temperature, therefore the elastic limit is lower:
• Forming metals is easier at high temperature.
• Metals become weaker at high temperature
At low temperature the elastic limit is high, a sample might break before
plastic deformation begins, i.e. it becomes brittle.
The Frank - Reed source
A single dislocation can
provide a slip of b only. For
macroscopic deformation
many dislocations are
needed, i.e. it is necessary to
provide a mechanism for the
generation of dislocations.
Such a mechanism is the F-R
source.
Suppose a cross slip generates the dislocation segment BC. Without stress
it is straight. Under stress it bows out to form an arc of radius R = Gb/2. As
the stress increases, R decreases until 2R = BC = l is reached at 0 = Gb/l.
At this point the arc becomes unstable, forms a closed loop and leaves the
original line behind. This cycle can be repeated.
A Frank - Reed source in Si.
Notice that the loops follow the structure of the lattice rather than
being ideal circles.