Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Lecture 4: Pulse-Width Modulation and Current Control
ELEC-E8402 Control of Electric Drives and Power Converters (5 ECTS)
Marko Hinkkanen
Spring 2017
1 / 25
Learning Outcomes
After this lecture and exercises you will be able to:
I
Explain the difference between the standard suboscillation PWM method and
the symmetrical suboscillation PWM method
I
Explain the principle of three-phase synchronous-frame current control
I
Understand operation of the current controller in Homework Assignment 1
The current controller is presented here for induction motors, but it can be easily
extended for other AC machines and for grid converters (equipped with L filter).
2 / 25
Outline
3-Phase Inverter
Pulse-Width Modulation
Current Control
Anti-Windup, Sampling, PWM Update
3 / 25
3-Phase Inverter
Leg a
Leg b
Leg c
a
b
c
Udc
N
4 / 25
Space Vector of the Converter Output Voltages
ia a
ib b
Udc
n
ic c
N
I
Zero-sequence voltage does not affect the phase currents
I
Reference potential of the phase voltages can be freely chosen
2
uan + ubn ej2π/3 + ucn ej4π/3
Neutral n as a reference
3
2
=
uaN + ubN ej2π/3 + ucN ej4π/3
Negative DC bus N as a reference
3
u ss =
5 / 25
I
Converter output voltage vector
2
β
uaN + ubN ej2π/3 + ucN ej4π/3
3
2
qa + qb ej2π/3 + qc ej4π/3 Udc
=
3
u ss =
where qabc are the switching states
(either 0 or 1)
I
(0, 1, 0)
(1, 1, 0)
Udc
√
3
(0, 1, 1)
(0, 0, 0)
(1, 1, 1)
2Udc /3
(1, 0, 0)
α
Vector (1, 0, 0) as an example
u ss =
2Udc
3
(0, 0, 1)
(1, 0, 1)
6 / 25
Switching-Cycle Averaged Voltage
I
Using PWM, any voltage vector inside the voltage hexagon can be produced
in average over the switching period
u ss =
2
da + db ej2π/3 + dc ej4π/3 Udc
3
where dabc are the duty ratios (between 0. . . 1)
I
√
Maximum magnitude of the voltage vector is umax = Udc / 3 in linear
modulation (the circle inside the hexagon)
I
PWM can be implemented, e.g., using the carrier comparison
I
Mainly switching-cycle averaged quantities will be needed in this course
(overlining will be omitted for simplicity)
7 / 25
Outline
3-Phase Inverter
Pulse-Width Modulation
Current Control
Anti-Windup, Sampling, PWM Update
8 / 25
Suboscillation Method
I
I
I
I
Duty ratios for carrier comparison
1
1 u
da = + a,ref
2 Udc
0
1 u
db = + b,ref
2 Udc
1 u
dc = + c,ref
2 Udc
Voltage vectors during Tsw in the example:
(0, 0, 0) → (0, 1, 0) → (1, 1, 0) → (1, 1, 1) →
(1, 1, 1) → (1, 1, 0) → (0, 1, 0) → (0, 0, 0)
Problem: only 87% of the maximum
available voltage can be used!
Proper zero-sequence component should be
added to utilize all available voltage
qa
carrier
da
t
qb
1
db
0
t
qc
1
dc
0
Tsw
t
9 / 25
Symmetrical Suboscillation Method
I
Zero sequence
u0 =
I
min(ua,ref , ub,ref , uc,ref ) + max(ua,ref , ub,ref , uc,ref )
2
Modified voltage references
0
ua,ref
= ua,ref − u0
I
0
ub,ref
= ub,ref − u0
0
uc,ref
= uc,ref − u0
Duty ratios for carrier comparison
da =
0
1 ua,ref
+
2
Udc
db =
0
1 ub,ref
+
2
Udc
dc =
0
1 uc,ref
+
2
Udc
I
Whole voltage hexagon can be now used
I
Following example: ua,ref = uc,ref = −Udc /4 and ub,ref = Udc /2
The symmetrical suboscillation method is identical to the continuous space-vector PWM.
10 / 25
carrier
1
carrier
qa
1
qa
da
0
da
t
qb
1
db
0
t
qb
1
t
qc
1
0
db
0
t
qc
1
dc
0
Tsw
Suboscillation method
dc
t
0
Tsw
t
Symmetrical suboscillation method
11 / 25
Outline
3-Phase Inverter
Pulse-Width Modulation
Current Control
Anti-Windup, Sampling, PWM Update
12 / 25
Current Controller in Stator Coordinates
ua,ref , ub,ref , uc,ref
i ss,ref
s
Current u s,ref αβ
controller
abc
i ss
αβ
abc
PWM
ia , ib , ic
M
I
PI controller cannot give zero steady-state error for sinusoidal references
I
Actual current does not follow its reference in the steady state
(phase shift and magnitude error)
13 / 25
Current Controller in Synchronous Coordinates
ua,ref , ub,ref , uc,ref
i s,ref
Current u s,ref dq
controller
abc
is
PWM
dq
abc
ia , ib , ic
ϑs
M
I
DC signals in steady state, no steady-state error
I
Synchronous-frame two-degree-of-freedom PI control will be considered
14 / 25
Review: Electrical Dynamics of the DC Motor and SPM
DC motor
ia
Ra
i ss
La
ua
ea
La
dia
= ua − Ra ia − ea
dt
Back-emf: ea = kf ωm
I
SPM in stator coordinates
Rs
Ls
u ss
ess
Ls
di ss
= u ss − Rs i ss − ess
dt
Back-emf: ess = jωm ψf ejϑm
Back-emf is a quasi-constant disturbance for the current controller
The DC motor and the surface-mounted permanent-magnet motor (SPM) were considered in the prerequisite course ELEC-E8405 Electric Drives.
15 / 25
Electrical Dynamics of the Induction Motor
I
State-space representation in stator coordinates
I
Stator current and rotor flux as state variables
di ss
RR
s
s
Lσ
= u s − Rσ i s − jωm −
ψ sR
dt
LM
{z
}
|
i ss
Rσ
Lσ
back-emf ess
dψ sR
RR
s
= RR i s + jωm −
ψ sR
dt
LM
u ss
ess
where Rσ = Rs + RR
I
Rotor-flux magnitude and speed change slowly
as compared to the stator current
16 / 25
General 3-Phase Load
I
Differential equation in synchronous coordinates
L
di s
+ jωs Li s = u s − Ri s − es
dt
General
SPM
Induction motor
L
R
Ls
Rs
es
jωm ψf
Lσ
R
σ jωm − RLMR ψ R
ωs
ωm
ωs
i ss
u ss
R
L
ess
17 / 25
Transfer Function in Synchronous Coordinates
I
Transfer function of the system to be controlled
1
i s (s)
= Y (s) =
u s (s)
(s + jωs )L + R
I
Back emf es can be seen as a load disturbance
I
Similar to the transfer function of the DC motor
I
Ideal converter and PWM will be assumed
(u s = u s,ref )
es
us
Y (s)
is
18 / 25
Cross-Coupling Compensation and Active Resistance
L
I
di s
= u s − (R + jωs L)i s − es
dt
Term jωs Li s causes the cross-coupling between the axes
did
= ud − Rid + ωs Liq − ed
dt
diq
= uq − Riq − ωs Lid − eq
L
dt
L
I
Cross-coupling is cancelled by adding jωs L̂i s to the controller output
I
Active resistance r improves disturbance-rejection capability
u s = u 0s + (jωs L̂ − r )i s
19 / 25
Control Algorithm
Current controller
1
s
i s,ref
Motor modelled in
synchronous coordinates
ki
kp
es
u s,ref
1
(s+jωs )L + R
is
jωs L̂ − r
dI
= i s,ref − i s
dt
u s,ref = kp (i s,ref − i s ) + ki I + (jωs L̂ − r )i s
20 / 25
Tuning
I
PI controller sees the system (assuming L̂ = L)
L
I
di s
= u 0s − (R + r )i s − es
dt
or
i s (s)
1
= Y 0 (s) =
u 0s (s)
sL + R + r
PI controller and closed-loop transfer functions
K (s) = kp +
ki
s
K (s)Y 0 (s)
i s (s)
αc
=
=
0
i s,ref (s)
1 + K (s)Y (s)
s + αc
where αc is the desired closed-loop bandwidth
I
Gain selection
r = αc L̂ − R
kp = αc L̂
ki = αc2 L̂
This tuning principle is covered in more detail in connection with the DC motors in the course ELEC-E8405 Electric Drives.
21 / 25
Outline
3-Phase Inverter
Pulse-Width Modulation
Current Control
Anti-Windup, Sampling, PWM Update
22 / 25
Anti-Windup
I
Maximum converter output voltage is limited: |u s | < umax
I
Reference |u s,ref | may exceed umax for large current steps
(especially at high rotor speeds due to the large back-emf |es |)
I
Realisable voltage vector u s is obtained from the PWM algorithm
I
Algorithm is augmented with the anti-windup
dI
1
= i s,ref − i s + (u s − u s,ref )
dt
kp
u s,ref = kp (i s,ref − i s ) + ki I + (jωs L̂ − r )i s
u s = PWM(u s,ref , ϑs )
23 / 25
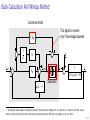
Back-Calculation Anti-Windup Method
Current controller
This signal is nonzero
only if the voltage saturates
1/kp
1
s
i s,ref
ki
kp
es
u s,ref
jωs L̂ − r
us
1
(s+jωs )L + R
is
Saturation
Go through the implementation in Homework Assignment 1. Extra material: M. Hinkkanen, H. A. A. Awan, Z. Qu, T. Tuovinen, and F. Briz, “Current
control for synchronous motor drives: Direct discrete-time pole-placement design,” IEEE Trans. Ind. Applicat., vol. 52, no. 2, 2016.
24 / 25
Discrete Implementation: Synchronous Sampling and PWM Update
sample
currents
update
references
carrier
da (k )
qa
k
k +1
k +2 t/Ts
Tsw
Single-update PWM
da (k )
qa
k
k +1
k +2
k +3
k +4 t/Ts
Tsw
Double-update PWM
I
No switching ripple in the current samples due to synchronous sampling
I
Duty ratios db and dc are updated simultaneously with da
The double-update PWM scheme is used in Homework Assignment 1.
25 / 25