Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
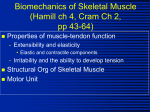
J. B,omechan,cs Pnnted Vol 0021-9290192 25. No. 12. pp 1467 -1476. 1992. Pergamon m Great Britain S500t.00 Press Ltd AN ACTIVATION-RECRUITMENT SCHEME FOR USE IN MUSCLE MODELING DAVID A. HAWKINS*? and M. L. HULL~ *Biomechanics Laboratory, University of Wisconsin-Madison, 2000 Observatory Drive, Madison, WI 53706. U.S.A. and IDepartment of Mechanical Engineering, University of California at Davis. Davis, CA 95616, U.S.A. Abstract-The derivation of a new activation-recruitment scheme and the results of a study designed to test its validity are presented. The activation scheme utilizes input data of processed surface EMG signals. muscle composition, muscle architecture, and experimentally determined activation coefficients. In the derivation, the relationship between muscle activation and muscle fiber recruitment was considered. In the experimental study, triceps muscle force was determined for isometric elbow extension tasks varying in intensity from 10 to 100% of a maximum voluntary contraction (MVC) using both a muscle model that incorporates the activation scheme, and inverse dynamics techniques. The forces calculated using the two methods were compared statistically. The modeled triceps force was not significantly different from the experimental results determined using inverse dynamics techniques for average activation levels greater than 25% of MVC. but was significantly different for activation levels less than 25% of MVC. These results lend support for use of the activation-recruitment scheme for moderate to large activation levels, and suggest that factors in addition to fiber recruitment play a role in force regulation at lower activation levels, INTRODUCTION Two of the greatest hindrances to predicting muscle forces in uino are the inability to determine (1) the relationship between electromyography (EMG) data and the level of muscle activation and (2) the relationships between the activation level and both the number of active motor units and the force generated per motor unit (or fiber). Many attempts have been made to derive expressions to predict muscle force based on muscle activation information. These include direct relationships between recorded electromyography data and muscle force (Zuniga and Simons, 1969; Gottlieb and Agarwal, 1971; Bigland-Ritchie, 1981) and muscle models incorporating activation parameters (Coggshall and Bekey, 1970; Stern, 1974; Zahalak et al., 1976; Hatze, 1981; Baildon and Chapman, 1983; Caldwell and Chapman, 1989). Despite these efforts, there does not exist a robust and widely accepted method for determining either muscle activation or muscle force based on electromyography data. Therefore, the objectives of this study were to (1) develop an activation-recruitment scheme for converting EMG data into muscle modeling activation variable values and (2) to test the validity of this scheme. METHODS Actitation-recruitment scheme Most muscle model derivations incorporate an activation variable which is used either to modify the force calculated based on muscle kinematics or to Received in~nafform 8 May 1992. f Author to whom correspondence should be addressed. determine the number of active motor units or fibers contributing to the force. The activation scheme presented here utilizes the input data of processed surface EMG signals, muscle composition, muscle architecture, and the experimentally determined activation coefficients to calculate the activation variable values used in the muscle models of a form similar to that given in equation (1): F,= i (hi) (F,j) cos @, (1) i=l where F, = nai = Fri = Q= muscle force (N), number of activated fibers of a given type i. force generated by each fiber type (N), fiber angle of pennation (deg). In equation (1) the force generated by a muscle is expressed as the summed force of all the active fibers within each fiber pool, adjusted for fiber orientation. In this type of muscle model, muscles are assumed to be composed of three fiber pools (SO-slow-twitch oxidative, FOG-fast-twitch oxidative glycolytic, FGfast-twitch glycolytic). Activation characteristics affect the number of active fibers (nai) within each fiber pool and, possibly, the fiber force (Fu). The activation scheme presented below provides a methodology for determining ‘n,,’ based on EMG data while making some assumptions about the relationship between fiber force and activation characteristics. It was assumed that the amplitude of the processed EMG signal (e) is proportional to the level of muscle activation and, hence, the number of active fibers within the muscle. Further, to be consistent with the three-fiber-type muscle model, it was assumed that the number of fibers per motor unit within a specific fiber 1467 D. A. HAWKINS and M. L. HULL 1468 pool, and the amplitude of the action potential propagated along each of these fibers, are the same, but not necessarily the same as those from another fiber pool. Thus, increases in muscle activation causing recruitment of a motor unit from one fiber pool may have a different effect on the processed EMG signal compared to an increase in activation that causes recruitment of a motor unit from a different fiber pool. The final assumntion made was that fibers from each motor unit -are equally distributed throughout the cross-sectional area of the muscle so that changes in the EMG signal created by motor unit recruitment are not the result of differences in impedance. Based on these assumptions, the processed EMG signal amplitude may be expressed as e= f Ci (r&i)* (2) areai area, area, ST ST =6.10x lo-’ (cm’) (Costill et al., 1976), = 7.12 x 10m5 (cm2) (Costill et al., 1976), =7.12 x 10m5 (cm2) (Costill et al., 1976), = fiber specific tension (N cm - 2), =22.5 NcmV2 (Fitts, 1990, personal communication). Expressing the change in force as a percentage of the maximum muscle force 9 (AF~F,,,)loo=(loo/F,,,)C(An,,)(F,,) +(An,z) (F,,) where F mnx= pcsa (ST) cos cb pcsa = muscle (cm2). V-n)1~0sQ>(5) + (4) (N), physiological (6) cross-sectional area i=l Dividing equation (5) by equation (3) yields @FnJJFmJ~=(loo/F,,)C(An,l)(F,l) +@n,,W,,) + @n,,)(F,,)l cm@ Ae Cl (An,,)+C,tAn,,)+C,(An,,) where e = processed and normalized EMG signal amplitude (percentage of maximum), nai=number of active fibers within a specific fiber pool, Ci = activation scheme constants which account for differences in fiber pool innervation ratios and variations in the amplitude of the action potential propagated along the fiber. Therefore, the change in the processed EMG signal may be expressed as a function of the change in the number of active fibers within each fiber pool, as given in equation (3). Ae= Cl (An,,) + C2 (Ana2)+ C, (An.&. (3) To complete the activation scheme derivation, the activation scheme constants were determined. These constants were determined experimentally by relating changes in muscle force (AF,,,) to changes in the processed EMG signal amplitude (de). Muscle force is regulated by changes in either the number of active fibers (recruitment) or the force generated per fiber (rate coding). It was assumed that for large limb muscles, rate coding plays only a minor role in force gradation compared to fiber recruitment. Based on this assumption and the assumptions that the fibers were activated while near their rest length, the contraction was isometric, and that the fiber force was constant after recruitment, the following relation applies: (7) If the muscle composition is known, then the experimental results (relating the percentage change in force to the percentage change in the processed EMG signal amplitude) may be used in conjunction with equation (7) to solve for the coefficients C,, C, and C,. For example, if predominately SO fibers are activated, then changes in the force result from changes in the number of active SO fibers. (AF,,,/F,,,nx)l~ (l~/F,,,XAn,J (F,i) cos Q Ae = Ci(Au,i) . (8) Solving for Ci, C,=(l00/F,,,)(F,,)cos~/lK,, (9) where K L= experimentally If predominately (AF,JF,,JlOO Ale determined (AFJF,,JlOO/Ae. FOG fibers are activated, then WWF,,3 = (Aus2)(Ftr) cos@ C2 (An,& * (10) Solving for C2, C, = W’WmJ V,,) ~0s Q/K,, (11) where K, =experimentally And if predominately determined (AF,,,/F,,&lOO/Ae. FG fibers are activated, then AF,=C(An,,)(F,,)+(An,,)(F,,) + (Ad (Ff3)l~0s@, Solving for C,, (4) C3 =(100/F,,,)(F,,)cos~)/K, where Fn area, = (area3 (ST) (N), = fiber cross-sectional (13) where area (cm2), K, = experimentally determined (AF,,,/F,,JlOO/Ae. Activation-recruitment scheme for muscle modeling For a heterogeneous muscle, equations (8)-(13) are valid as long as the experimental values (K,, K,, K3) correspond to activation levels causing fiber recruitment from only one fiber pool. An illustration of these ideas is given in Fig. 1, with normalized EMG amplitude shown along the horizontal axis and normalized force along the vertical axis. The slopes (K ,, K1, and K3) are determined by calculating the best-fit lines for these data over three regions of normalized EMG. The three regions are selected such that changes in the EMG signal are believed to be caused exclusively by recruitment of only one fiber type. To make the activation scheme continuous, it is necessary to know explicitly the EMG amplitudes $ 5 a P r' ec2= lOO-pcsa(pct,)(ST,)cos(D/[K,(F,,,)] = 100-pct,/(K,). (IS) Values for ‘n,,’ can now be defined from equation (3): for 0 <e < ccl, for ec2<e<lOO, na2=n2, z 1; =40- Solving for ‘ec2’ yields na3=o, na3= (e-ecZ)/C,, pCti = percentage of the muscle pcsa composed of ‘P-type fibers. 60- K, = pcsa (pct,NST,)cos 4/( lOO-ec2)(F,,,). na3- -4 where E Similarly, if ‘ec2’ represents the activation level when FG fibers begin to be recruited, then na2= (e-ecl)/C,, x (ST) cos @/(eel-0) (F,,,), 6 04) na2- -0, =n1, K, =(AF,,,/JF,,,)lOO/Ae=pcsa(pct,) 60 ecl=pcsa(pct,)(ST)cos@/[K,(F,,,)] n,, =elC,, corresponding to the onset of recruitment from each fiber pool. SO fibers are recruited for EMG amplitudes greater than zero. The EMG amplitudes when FOG and FG fibers are first recruited are determined based on knowledge of the muscle composition, specific tension, physiological cross-sectional area and the experimental coefficients. For example, the slope K, of normalized force versus normalized EMG is valid for EMG amplitudes less than that amplitude which causes all SO fibers to be recruited. Letting ccl represent the EMG amplitude at which all SO fibers become active, then i E Solving for ‘ccl’ yields %l 4, =nl, ‘Z 1469 for ccl <e < ec2, (16) An example of one possible recruitment scheme resulting from these procedures is illustrated in Fig. 2, with normalized EMG signal amplitude shown along the horizontal axis and the number of active fibers within each fiber pool along the vertical axis. SO fibers are recruited first, followed by FOG, and lastly by FG. The EMG amplitudes ‘ccl’ and ‘ec2’ represent the transition from recruitment of one fiber type to another. Methodology for determining normalized muscle EMG The determination of an appropriate normalizing factor for surface EMG data is not an easy task. The EMG signal recorded using surface electrodes may be influenced by the length and velocity of the muscle if such factors alter either the impedance or the location of motor units relative to the electrodes. In addition, it is not a trivial task to define an activity that will elicit a maximum EMG signal that may be used to normalize other EMG signals. However, a new procedure for determining a normalized EMG signal was developed for just this purpose. 70- 302010 ./ f / 0 P 9 Kl l -/, 0. 10 , 20 , 30 , , 40 50 , , 60 70 , , 60 90 '$ "2 - 6 "3- / l / l 100 EMG amplitude (% of maximum) Fig. 1. An example of the results that might be obtained using an experimental approach to determine the activation constants (K,, K,, and KJ. Normalized EMG is shown along the horizontal axis and normalized force along the vertical. Slopes (K,, K,, and K,) are determined by calculating the best-fit lines for experimental data obtained for three activation regions corresponding to fiber recruitment from only one fiber pool. ii is -.-.-.-. e-a-o-0 “I_ w_,+/++;+;;;:j -/ f--*-*--*-*-*--* 0 10 20 30 40 50 60 70 60 90 100 EMG amplitude (Yo of maximum) -o- na, -+- na2 -*- na3 Fig. 2. An example of one possible recruitment sequence resulting from the modeled activation scheme. Normalized EMG is shown along the horizontal axis and the number of active fibers within each fiber pool along the vertical. SO fibers are recruited first followed by FOG and lastly by FG. 1470 HAWKINS and D. A. male volunteers between the ages of 22 and 41 (mean age, weight, and height being 27.6 yr, 736 N and 1.78 m, respectively) participated in this study. All the subjects were in good physical condition. The test protocol was explained to each subject prior to the experiment and they were given the opportunity to stop the testing at any time. In this study, the triceps brachii (TB) force was determined, using both the muscle model [equation (l)] and another direct approach based on rigid-body dynamics, as subjects performed isometric elbow extension efforts varying in intensity from 10 to 100% of a maximum voluntary contraction (MVC). To determine TB force based on either approach required information specific to that approach. The procedures utilized to obtain this information are discussed below. One objective of the test procedure was to position the subject such that only the TB muscle would contribute to elbow torque during the elbow extension test protocols described below. To achieve this objective, the subject reclined in a specially designed chair with his right upper arm directed posterior to the torso and supported by a wooden brace (see Fig. 3). This arm position was selected based on pilot work which indicated that this position isolated the elbow joint and prevented other structures from contributing to the torque recorded by the Cybex machine. Signals from three sources were recorded to determine TB muscle force using both the muscle model and the second direct approach. A Cybex dynamometer provided a-voltage output proportional to the elbow torque. Two EMG circuits provided the remaining signals recorded. The Cybex output was also The determination of the EMG normalizing factor involved four steps. In the first step of the procedure, the specific muscles to be studied were identified along with the joints they spanned. The second step required identification of the segment kinematics produced by the subject during the activity studied. The subject performed the activity or task of interest while appropriate data (i.e. film, video, or goniometer, and EMG) were recorded to allow the determination of segment kinematics and periods of muscle activity. During periods of muscle activity, the kinematics of the joints the muscles of interest spanned were identified. In step three, to account for changes in the EMG signal created by changes in the impedance caused by the limb kinematics, maximum-effort exercises were performed by the subject while maintaining similar limb kinematics to those recorded for the movement in question. Several exercises were tried, to determine which one elicited the maximum EMG signal for each of the muscles considered. In step four, a maximum EMG value was determined by calculating an average root-mean-square (RMS) EMG from the maximumeffort exercises. The maximum RMS EMG value was subsequently used to normalize instantaneous RMS EMG values determined for the movement task being studied to give the normalized EMG signal amplitude (e). This procedure yielded instantaneous EMG amplitudes which were used in the activation scheme to determine kp;. Experimental M. L. HULL verification An experimental study was conducted to test the validity of the activation scheme presented above. Ten Data acquisition computer EMG cables A r-h- Signalconditioningcircuit Interface panel Potentiometer cable\ 2 Cybex con1 A[- dynamometer “‘““?“” Torque output I I \ 1 oscilloscope Fig. 3. The subjSct/equipment setup used in the elbow extension study.Elbow moments were determined from data recorded using a Cybex dynamometer. The levels of triceps brachii activation were recorded using surface electrodes. 1471 Activation-recruitment scheme for muscle modeling input to an oscilloscope, which provided feedback to the subject and identified the level of torque being generated as a function of his maximum value. Cybex dynamometer and EMG amplifier outputs were sampled at loo0 Hz and converted to digital signals using a Metrabyte A/D converter. These signals were then processed using specially designed software to determine joint torques and normalized TB EMG amplitudes. Triceps brachii force (Fmode,)was calculated using the activation scheme and the muscle model [equation (l)]. Model input quantities (i.e. muscle composition and pennation angle at rest length) were taken from the literature and ‘pcsa’ values calculated. Triceps brachii pennation angles and muscle composition were assumed to be similar among the subjects. The average data for these values were taken from the work of Amis et al. (1979) and are shown in Table 1. Since all subjects generated different levels of torque, and accurate measures of muscle physiological crosssectional areas (pcsa) were not obtainable, pcsa values were determined based on individual maximum TB force calculated using equation (6) for the elbow flexed to 75”. It was assumed that the medial and lateral heads had similar ‘pcsa’, while the long head was 1,386 times larger (Amis et al., 1979). It was assumed that optimal muscle length for the TB muscle occurs at a joint angle of 75” of flexion. The activation scheme used to estimate the number of active fibers within each fiber pool required as input the TB EMG amplitudes. These values were determined using surface electrodes and appropriate amplification and signal processing. Prior to attaching the electrodes to the skin covering the TB, the posterior portion of the subject’s upper arm was shaved and lightly abraded to remove dead skin. Three Ag-AgC1 surface electrodes (supplied by In Vivo Metric) were then secured to the skin covering the lateral and medial heads of the TB muscles. The electrodes had an outer diameter of 12.5 mm, with a sensor diameter of 6mm. The electrodes were applied to the skin with a center-to-center spacing of approximately 2.5 cm. The middle electrode was used as a ground (or reference) electrode. Prior to digital sampling of each EMG signal, the signal was amplified and filtered. Muscle action potentials were amplified and high-pass-filtered with a small signal conditioning circuit located within 1Ocm of the electrode sensing elements. The signal conditioning circuit incorporated an amplifier with a gain of approximately 850, and an RC high-pass-filter with a cutoff frequency set to 33 Hz. Further processing involved the calculation of an average rootmean-square (RMS) EMG value as previously discussed. The average RMS EMG values were normalized with respect to similar values determined for maximum efforts. To determine whether the three heads of the TB (medial, lateral, and long) acted independently or together during the elbow extension tasks studied, a preliminary study was conducted. In this study, EMG signals from all three heads of the TB were recorded as a subject performed isometric elbow extension tasks of varying intensities. Paired r-test statistical analyses were performed on combinations of TB EMG data consisting of the medial and long heads, lateral and long heads, and medial and lateral heads. The results from these analyses indicated that there were no significant differences between the activation levels of the medial and long heads (p=O.20), but that there were significant differences between the lateral and both the medial and long heads (p = 0.002 and 0.0007, respectively). Therefore, to reduce the amount of data collected, only the medial and lateral heads were monitored and the long-head activation was assumed to be similar to that of the medial head. The modeled force-EMG relationship was evaluated over the entire range of effort levels. With the elbow at 75’ of flexion the subject was instructed to provide a maximum isometric effort, while monitoring the maximum Cybex dynamometer voltage output as displayed on an oscilloscope. The data from three trials were then recorded at the following effort levels: 10, 20, 30, 40, 50, 60, 70, 80, 90 and 100% of the maximum torque. The subject was asked to perform isometric efforts to maintain the oscilloscope trace at different levels corresponding to the above-mentioned percentages of the maximum efforts. Data were sampled for 0.5s and averaged for each trial. EMG data were normalized with respect to values determined for the maximum effort trials. Activation scheme coefficients were determined based on the procedures outlined previously, with the exception Table 1. Quantities used to describe the triceps brachii design. Architecture data were taken from Amis et al. (1979), and composition data from Johnson et al. (1973). These data were used as input to the muscle model Triceps brachii muscle Medial head Structure Pennation angle (deg) SO fibers (% by area) FOG fibers (% by area) FG fibers (% by area) Unipennate/couples 13.2 33.0 35.0 32.0 Lateral head Unipennate/couples 11.9 33.0 35.0 32.0 Long head Bipennate 15.7 33.0 35.0 32.0 D. A. HAWKINS and M. L. HULL 1472 that an average EMG value was utilized. The average EMG was defined as average EMG = [EMGmcdial(pcsamsdis3 + EMGlatcral(PCsalntcral) + EMGlonptPCSalon~l/PCsatotsl, (17) where EMG,,,,,, = average normalized RMS EMG for the medial triceps brachii, EMG,.w =average normalized RMS EMG for the lateral triceps brachii, EMG,,,, = average normalized RMS EMG for the long triceps brachii, pcsa,_,ia, =pcsa of the medial triceps brachii (cm2), pcsalstcrPl = pcsa of the lateral triceps brachii (cm2), =pcsa of the long triceps brachii (cm2), I=aloog = total pcsa of triceps brachii (cm2). pcsaI.,.l Recall, that an experimental approach was needed to determine the activation constants (K r, K,, KS). K i represented the ratio of the change in normalized muscle force to the change in normalized EMG for effort levels causing recruitment of SO fibers. K, and Ks were defined similarly, with the exception that they pertained to effort levels causing recruitment of FOG and FG fibers, respectively. To determine these ratios for this study, both ‘Fcybex) and the average EMG [equation (17)] were determined for each effort level tested. Linear regression analyses were performed to determine the equations that described best ‘F,ybex) as a function of average EMG for three effort level ranges. Each effort level range was considered to cause recruitment of one fiber type only. Effort level ranges analyzed were O-25, 3565, and 75-100% of MVC. The slopes of the lines determined for each of these ranges were taken as K,, K,, and K,, respectively. To assess how well these constants described the experimental data, the correlation coefficients were calculated for each regression equation. Activation constants were utilized to determine the activation scheme coefficients (C,, C,, C,) as expressed in equations (9)-(13), and activation/fiber recruitment transitions (ccl and ec2) as expressed in equations (14) and (15). In the second approach used to determine TB muscle force, rigid-body dynamic analysis techniques were used in conjunction with Cybex torque data to calculate TB force (Fcybcx) directly. A free-body diagram of the lower arm is shown in Fig. 4. The equations describing the rotational dynamics of this segment are given in equation (18): (Fcybcr)(rr) +(sw) (CGL) (cos 0) - (Tcybcr)= Iu, (18) where F cybsx = rT = triceps brachii force determined from Cybex torque (N), triceps brachii moment arm length (cm), it CGL -+I Fig. 4. Free-body diagram of the forearm. See text for symbol definitions and the derivation used to determine triceps brachii force. =bwer arm plus hand segment weight (N), SW CGL =distance to center of gravity of combined lower arm and hand from elbow joint center (cm), =angle of lower arm relative to horizontal 0 (deg), T cJbcl =cybex Torque (N cm), = combined lower arm and hand moment of I inertia about elbow joint center (kg cm2), = lower arm angular acceleration (rad s- 2). a, In the derivation of equation (18), it was assumed that the TB muscle generated the majority of elbow extension torque. All tests conducted in this study were isometric; hence, la, was set equal to zero. Equation (18) may be rearranged, expressing TB muscle force as a function of the other parameters as shown in equation (19): F cybcx= [~yt.c. -SW (CGL) cos @l/r,. WI Variables appearing on the right hand side of equation (19) were determined either experimentally or from previously published data. ‘Tcybcx’was determined from the output of the Cybex dynamometer. An average torque was determined for a 5OOms interval for each trial. The joint angle (0) was maintained at 75” of flexion. Triceps brachii moment arm data (rT) were taken from the work of Amis et al. (1979) (see Table 2). The combined forearm plus hand weight (SW) and center of gravity location were determined from subject anthropometries and the work of Plagenhoef (1983). The Cybex machine was calibrated prior to each day of testing and the calibration information was confirmed at the end of testing. The linearity of the Cybex torque calibration was always very good (T> 0.99). The validity of the activation scheme utilized in the muscle model was tested by comparing Fmode, to F cybcx.The results from the subject sample (n= 10) were pooled and analyzed using a two-sided paired t-test statistical analysis procedure. In general, the null hypothesis tested was (Fcybex- Fmo~c,)= 0. (20) Activation-recruitment scheme for muscle modeling 1473 Table 2. Triceps brachii moment arm lengths and the amount muscle lengths change as a function of elbow flexion angle. Full extension is represented as an angle of 0”. Moment arm lengths were taken from the work of Amis et al. (1979). Changes in muscle length represent the increase in muscle length as the arm is flexed from full extension to the specified angle. These data were taken from four cadaver specimens as discussed in the text. Also indicated are standard deviations for the muscle length change data Joint angle (deg) 10 30 60 75 90 115 Moment arm length (cm) of triceps (Amis et al., 1979) 2.40 2.58 2.10 2.10 1.97 1.70 Mean change in triceps muscle-tendon length with flexion from full extension (cm) (from skeletons n = 4) 0.7 1.4 2.1 2.9 3.4 3.8 Standard deviation of length change estimates 0.2 0.6 0.3 0.1 0.2 0.5 hypothesis was rejected (p < 0.001). For average EMG amplitudes greater than 25% of maximum, the null hypothesis was not rejected (p = 0.47) and the power of the test was found to be -0.94. These results lend support to the activation scheme used in the model for intermediate and large EMG amplitudes, but not for small amplitudes. Bi 0 II 10 20 30 I 1111 40 50 60 70 80 I 90 I loo DISCUSSION EMG amplitude (% of maximum) + Fcybex l Fmodel Fig. 5. A comparison of the experimental and modeled triceps brachii force as a function of average EMG amplitude for a single subject. For EMG amplitudes below 25% of maximum, the model underestimated the force. For EMG amplitudes above 25% of maximum there were no significant differences between the model force predictions and the experimental forces. The null hypothesis was rejected for p-values less than 0.05. RESULTS Based on the calculated slopes of the three regions of the normalized force-EMG curve, it was determined that the activation scheme constants K2 and K, were the same and smaller than K,. Activation constants were found to be K, = 1.1756, K,=K3=0.6779. (21) The correlation coefficients determined for the equations incorporating the above constants were 0.70 and 0.63, respectively. An example result of Fcybcx and F modc,as a function of average activation level for a single subject is shown in Fig. 5. The difference between model and experimental data depended on the average EMG amplitude. For small amplitudes (e<25% of maximum) the null Because of the research and clinical importance of predicting individual muscle forces and the current limitations in determining muscle activation levels which affect this force, a new activation recruitment scheme was derived. This scheme may be used in conjunction with surface electromyography to predict the number of active muscle fibers, which is one important variable in fiber-based muscle models. The derivation of the activation-recruitment scheme depended on several assumptions. Some of these assumptions dealt with the relationships between a recorded EMG signal amplitude, the number of active fibers (n,,), and the amplitude of action potentials propagated along these fibers. Formulating this relationship was based on an understanding of the properties of the EMG signal. The electromyogram is the electrical manifestation of the neuromuscular activation associated with a contracting muscle. It is a complicated signal which is affected by the anatomical and physiological properties of the muscles, the control scheme of the peripheral nervous system, as well as the characteristics of the instrumentation used to detect it. The signal develops when an action potential of sufficient magnitude propagates down a motoneuron. All the muscle fibers associated with that motoneuron are activated, resulting in the propagation of an action potential along the length of each fiber. In general, depolarization of the muscle fibers of one motor unit overlap in time with those of other motor units. Hence, the resultant signal present at a 1474 D. A. HAWKINSand detection site constitutes a spatial-temporal superposition of the contributions of all individual action potentials and is random in nature (Basmajian and DeLuca, 1985). Because the EMG signal is a superposition of individual action potentials, the signal detected by a particular electrode installation will be affected primarily by changes in the number of active fibers and the amplitude of the action potential created by each fiber. This result occurs provided that fibers from any single motor unit are distributed evenly throughout the muscle cross-sectional area so that changes in the EMG signal are not the result of differences in impedance. Evidence to support this idea has been found in both human studies (Johnson et al., 1973) and cat studies (Burke and Tsairis, 1973). Based on the three-fiber-type muscle model, it was also assumed that the amplitude of the action potential and the motor unit innervation ratio are the same for motor units within a specific fiber pool. Burke and Tsairis (1973) examined the medial gastrocnemius muscle of cats and found that the fiber cross-sectional areas were different between fiber types, with mean values being 1734,2890, and 5290pm’ for SO, FOG, and FG fibers, respectively. Olson et al. (1968) studied the triceps surae muscle of cats and showed that the fiber diameter influences the recorded EMG amplitude. Data from these two studies support the assumption that different fiber types elicit different EMG amplitudes. A review article by Buchthal and Schmalbruch (1980) gives further support for the assumptions stated above and also provides evidence that different motor units have different innervation ratios. Therefore, based on the results from previous studies, activation scheme constants (C,) were defined to account for the effects that innervation ratio and action potential amplitude have on the EMG amplitude. Through these constants the processed EMG signal was modeled as increasing in a piecewise linear fashion with increases in the number of active fibers as expressed by equation (2). To select an EMG signal processing technique which would yield an amplitude that satisfied the assumed linear relationship mentioned above, previously described techniques were scrutinized. Over the past several years, several techniques have been used to process EMG signals. Some of these techniques have included rectification, smoothing of a rectified signal, averaging of a rectified signal, integration of a rectified signal, spike counting, root-meansquare, and power spectral density analysis. For a detailed discussion of each of these techniques, refer to Basmajian and DeLuca (1985). Basmajian and DeLuca recommended that the RMS technique be used because they believe it provides more information about muscle activation compared to other methods. They reported that the RMS method is unaffected by the cancellation due to motor unit action potential train superposition, which does affect other processing techniques involving rectification. This method was selec- M. L. HULL ted based on the idea that motor unit action potential cancellation might degrade the desired linearity. Another assumption was that fiber recruitment provided the primary means of muscle force regulation with rate coding playing only a minor role. The two primary means of force gradation are fiber recruitment and rate coding. The first method, fiber recruitment, takes place in a predictable manner. The size principle put forth by Henneman et al. (1965) states that motor units are recruited in a rank order, dependent on the size of their motoneuron. Large motoneurons have higher activation thresholds for recruitment. Several studies have confirmed this general principle and indicate that slow-twitch fibers are recruited first, followed by FOG, and lastly FG (Henneman et al., 1974; Budingen and Freund, 1976; DeLuca et al., 1982; Armstrong and Laughlin, 1985; Zajac and Faden, 1985). Slow-twitch fibers tend to be smaller and are innervated by neurons of a smaller size than the larger fast-twitch fibers. Thus, slow-twitch motor units have slower conduction velocities and lower activation level thresholds. Kanosue et al. (1979) tested the brachialis muscles in human subjects and found that recruitment was the major source of force gradation for effort levels up to 70% of maximum voluntary contraction (MVC). For the deltoid muscle, DeLuca et al. (1982) showed that recruitment was responsible for force gradation for activation levels between 40 and 80% of MVC. Hennig and Lomo (1987) investigated fast and slow motor units of cat muscles. In contrast to the results given above, they suggested that fiber recruitment is the primary means of force gradation for SO and FG motor units, but that FOG fibers are recruited at frequencies less than optimal, thus allowing rate coding to contribute to force gradation for these fibers. Although a review of the literature does not reveal a single relationship between force gradation within a specific fiber pool and recruitment/rate coding interactions, it does suggest that the principle mechanism for force gradation by large limb muscles is recruitment. Several other assumptions stemmed from the assumption inherent in fiber-based muscle models that the muscle can be considered to be composed of three specific fiber types. To be consistent with this assumption, the activation threshold and innervation ratio of motor units within a given fiber pool were assumed to be similar. In reality, a continuum probably exists for both the amplitude of the action potential propagated along the fiber and the innervation ratio. The use of specific values for each fiber pool represents a tradeoff between model complexity and predictive accuracy. The validity of the activation-recruitment scheme was tested using an experimental elbow extension protocol and comparing the modeled TB force to the force calculated using inverse dynamics techniques. In addition to the assumptions stated above, several other assumptions were required for utilization of the Activation-recruitment muscle model in this application. The TB composition, pennation angle, and rest length were assumed to be similar among subjects. These values probably varied between subjects; however, the statistical analysis procedures were designed to account for these intrasubject variations. Triceps brachii rest length was assumed to occur when the joint was flexed to 75” of flexion. This assumption stemmed from the belief that the body matches the full range of the force-length relationship to the full range of joint motion. For example, the full range of elbow flexion is around 140”. For a range of motion of 140’, the TB length changes by 5 cm (extrapolating from data presented in row 2 of Table 2 discussed below). Thus, to match the force-length curve to the full range of motion requires that rest length occurs when the muscle length is 2.5 cm greater than that at full extension. Again referring to Table 2, this length occurs for a joint flexion angle near 75”. To utilize the inverse dynamics technique for determining TB force it was assumed that only the TB contributed to the joint torque. This was considered a valid assumption due to the smaller pcsa and the less advantageous line of action of other muscles crossing the elbow. In addition, the arm position depicted in Fig. 3 was selected based on pilot work which indicated that this position prevented other structures from contributing to the torque recorded by the Cybex machine during the elbow extension effort. Additionally, during pilot studies, the EMG amplitude of the biceps brachii was recorded as subjects performed maximum-effort elbow extension tasks. The results showed the biceps brachii to be activated less than 5% of MVC. The final assumptions in the experimental protocol were that the average EMG amp: rude in the range O-25% of MVC, 35-65’~ of MVC, and 75-100% of MVC represented recruitment of only SO, FOG, and FG fibers, respectively. If the rank order of recruitment ideas of Henneman et al. (1974) are correct, then these assumptions seem reasonable for an average TB composed of 33% SO fibers, 35% FOG fibers and 72% FG fibers (Table 1). Despite the assumptions inherent in the activation-recruitment derivation and testing protocols, the force-EMG results lend support to the use of the activation scheme presented here for moderate to large EMG amplitudes, but not for small amplitudes. Recall from the activation scheme derivation that force gradation may be regulated by either increasing the number of active fibers, or increasing the force generated by active fibers by increasing the stimulation frequency (i.e. rate coding). In the model derivation it was assumed that rate coding was only a minor factor in force gradation of large limb muscles. 11appears from the results of this study that this is an inappropriate assumption for low activation levels. These data suggest that for low activation (indicative of SO fibers generating the observed 1475 scheme for muscle modeling levels force), motor unit recruitment does not act alone to increase the force. It may be that a large percentage of the overall number of SO motor units have low activation thresholds, hence being recruited at low activation levels. Upon initial recruitment, these fibers may be stimulated at a frequency which does not cause the fibers to generate their maximum force. The large number of initial motor units recruited could cause the actual muscle force to be higher than that predicted by the muscle model. Indeed, this is the response that was observed. This response suggests that motor unit recruitment is the major mode of force gradation for activation levels causing the activation of FOG and FG fibers, but not of SO fibers. Thus, the activation scheme used in the muscle model provides accurate results for activation levels causing recruitment of FOG and FG fibers, but causes the muscle force to be underestimated when only SO fibers are active. Because the results suggest that rate coding may act to regulate muscle force at low activation levels, it is useful to consider how the effects of this phenomenon might be included in the model. Rate coding effects can be accounted for in the muscle force calculations by either (1) adding an offset value for the number of active fibers at low activation levels, or (2) performing additional processing of the EMG signal and including an additional variable in the muscle model derivation. The EMG signal could be processed using Fourier transforms to determine the frequency content of the signal. Since rate coding affects fiber force, an additional variable and relationship could be added to define ‘Fl; in the muscle model derivation. The value of the activation-recruitment scheme presented here lies in its mathematical formulation [equation (3)]. This equation is based on the fundamental principles which relate the processed EMG signal to the number of active muscle fibers through constants (C,). These constants represent the effects due to tissue impedance and the amplitude of the propagated action potential, which depends on the fiber diameter. In this study these constants were specified after determining experimental constants (Ki). The need to determine the experimental constants required that changes in muscle force for given changes in the processed EMG signal be obtainable for the muscle to be studied. Ideally, it is desirable to determine the constants Ci independently of the experimental constants. This appears feasible, pending results from further research designed to identify the individual effects that tissue impedance and fiber diameter have on these constants. REFERENCES Amis, A. A., Dowson D. and Wright V. (1979) Muscle strength and musculo-skeletal geometry of the upper limb. Engg Med. 8(l), 4148. Armstrong, R. B. and Laughlin, M. H. (1985) Metabolic indicators of fibre recruitment in mammalian muscles during locomotion. In Journal of Experimental Biology: 1476 D. A. HAWKINS Design and Per$ormance of Muscular Systems Vol. IIS, (Edited by Treherne, J. E.), pp. 201-213. The Company of Biologists Limited, Cambridge. Baildon, R. W. A. and Chapman, A. E. (1983) A new ;;;!;;;h to the human muscle model. J. Biomechanics 16, Basmajian, J. V. and DeLuca, C. J. (1985) Muscles Alive their Functions Revealed by Electromyography (5th Edn), Wilhams and Wilkins, Baltimore. Bigland-Ritchie, B. (1981) EMG/Force relations and fatigue of human voluntary contractions. Exercise Sport Sci. Rev. 9,75-l 17. Buchthal, F. and Schmalbruch, H. (1980) Motor unit of mammalian muscle. Physiol. Rev. 60(l), 90-142. Budingen, H. J. and Freund, H. J. (1976) The relationship between the rate of isometric tension and motor unit recruitment in a human forearm muscle. Pjlueg. Arch. 362, 61-67. Burke, R. E. and Tsairis, P. (1973) Anatomy and innervation ratios in motor units of cat gastrocnemius. J. Physiol. 234, 749-765. Caldwell, G. E. and Chapman, A. E. (1989) Applied muscle modelling. Implementation of muscle-specific models. Comput. Biol. Med. 19,417434. Coggshall, J. C. and Bekey, G. A. (1970) A stochastic model of skeletal muscle based on motor unit properties. Math. Biosci. 7, 4055419. Costill, D. J., Daniels, J., Evans, W., Fink, W., Krahenbuhl, G. and Saltin, B. (1976) Skeletal muscle enzymes and fiber composition in male and female track athletes. J. Appl. Physiol. 40(2), 149-154. DeLuca, C. J., LeFever, R. S., McCue, M. P. and Xenakis, A. P. (1982) Control scheme governing concurrently active human motor units during voluntary contractions. J. Phvsiol. 329. 129-142. Gottheb, G. L., and Agarwal, G. C. (1971) Dynamic relationship between isometric muscle tension and the electromyogram in man. J. Appl. Physiol. 30, 345-351. and M. L. HULL Hatze, H. (1981) Myocybernetic Control Models of Skeletal Muscle. University of South Africa, Muckleneuk Pretoria. Henneman, E., Clamann, H. P., Gillies, J. D. and Skinner, R. D. (1974) Rank order of motoneurons within a pool: law of combination. J. Neurophysiol. 37, 1338-1349. Henneman, E., Somjen, G. and Carpenter, D. 0. (1965) Functional significance of cell size in spinal motoneurons. J. Neurophysiol. 28, 560-580. Hennig, R. and Lomo, T. (1987) Gradation of force output in normal fast and slow muscles of the rat. Acta Physiol. Stand. 130, 133-142. Johnson, M. A., Polgar, J., Weightman, D. and Appleton, D. (1973) Data on the distribution of fibre types in thirty-six human muscles: an autopsy study. J. Neurophysiol. Sci. 18, 111-129. Kanosue, K., Yoshida, M., Akazawa, K. and Fujii, K. (1979) The number of active motor units and their firing rates in voluntary contraction of human brachialis muscle. Jpn J. Physiol. 29, 427443. Olson, C. B., Carpenter, D. 0. and Henneman, E. (1968) Orderly recruitment of muscle action potentials. Arch. Neurol. 19, 591-597. Plagenhoef, S. (1983) Anatomical data for analyzing human motion. Res. Q. Exercise Sport 54(2), 169-178. Stern, J. T. (1974) Computer modeling of gross muscle dynamics. J. Biomechanics. 7, 41 l-428. Zahalak. G. I.. Duffv. J.. Stewart. P. A.. Litchman. H. M.. Hawley, R. H. andPaslay, P. R: (1976) Partially activated human skeletal muscle: an experimental investigation of force, velocity, and EMG. J. Appl. Mech. 81-86. Zajac, F. E. and Faden, J. S. (1985) Relationship among recruitment order, axonal conduction velocity, and muscle-unit properties of type-identified motor units in cat plantaris muscle. J. Neurophysiol. 53, 1303-1322. Zuniaa, E. N. and Simons. D. G. (1969) Nonlinear relationship .between averaged electromyogram potential and muscle tension in normal subjects. Arch. Phys. Med. Rehabili. 50,613-620.