Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
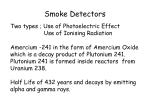
RockSat 2010 Final Report RocketSat VI The objective of RSVI is to measure large aerosol particle density and charge from 75 to 95 km to characterize the numerical density distribution of these particles and the charge of the particles in the region of the atmosphere above Wallops Flight Facility. University of Colorado at Boulder Students Chris Koehler Kendra Kilbride Brian Sanders Zoltan Sternovsky Colorado Space Grant Consortium University of Colorado at Boulder 5-7-2010 University of Colorado at Boulder RockSat 2010 5-7-2010 1.0 Mission Statement The objective of RSVI is to measure large aerosol particle density and charge from 75 to 95 km to characterize the numerical density distribution of these particles and the charge of the particles in the region of the atmosphere above Wallops Flight Facility. The two main goals of the RocketSat VI project is to measure the amount of meteoric smoke particles in the atmosphere above Virginia, and to determine if the particles have a positive or negative charge. This data will be used to compare to other similar studies to see if the findings are consistent. Additionally, we can use the information to support or refute scientific models of the global shift of the particles during certain seasons. The objectives for the team are to design and implement a supporting payload for the detectors, measure the attitude of the rocket during flight, and retrieve all data when the payload is returned. This mission will allow the team to implement a new flash memory for the RocketSat missions, and will also teach the team about attitude representation. 2.0 Mission Description and Requirements 2.1 Mission Background Meteors enter the atmosphere and burn up every day, leaving behind several tons of small smoke particles in the upper mesosphere and lower thermosphere [1]. These particles add significantly to the layers of metals already found in the atmosphere, which consists of mostly sodium and iron, but also contain potassium and magnesium. It is unclear what type of metal is left behind from meteoroids, but scientists suspect that they are typically positively charged sodium ions. These ions form larger aerosol particles (diameter > 1 nanometer) when ice collects around the sodium ion. This also causes the particle to descend slightly, so that the particles are concentrated through a range of the atmosphere, approximately 75 km to 95 km. The meteoritic smoke particles have numerous effects on the upper atmosphere. As previously mentioned, these particles increase the overall metal budget, or amount of metal, in the mesosphere. The concentrations of metals can affect radar waves in the mesosphere [4]. The metal budget is also important to atmospheric scientists because it affect tidal and gravity activities that dictate global circulation [2]. The increasing amount of large particles in the mesosphere also increases the number of solid surfaces on which reactions can occur. Scientists are still investigating the major effects of these particles on the atmosphere. These sodium ions in the mesosphere are believed to be the positively charged core for ice particles that form in the altitude range from 75 to 95 km in the atmosphere. These ice particles are the result of sub freezing temperatures and an increase in water vapor. As the sodium ions descend in the atmosphere the ice particles continue to gain new layers of ice and the particle grows substantially by the time it reaches 75 km above the surface. The ice particles can reach up to 50 nm in size. The formation of these particles is linked to the increase in global warming effects on the planet. The increased amount of methane causes an University of Colorado at Boulder RockSat 2010 5-7-2010 increase in the water vapor in the atmosphere, and the increased carbon dioxide causes a reduction of upper atmospheric temperatures. This combination results in a much higher formation rate of these ice particles. However, the ice particles do not form over all locations on Earth. The particles have been measured to be more present in the more polar latitudes of the Earth. Beyond the formation and location, little is known about these particles. In situ measurements of the particles have not been made on more than a handful of occasions. 2.2 Mission Requirements The requirements for the project were to detect the number large aerosol particles and measure the charge of the particles. Initial design requirements for the system were imposed by the RockSat Program and Wallops Flight Facility. The project level and system level requirements are shown in the following tables. The Subsystem requirements tables are shown in the Appendices. Project Level Requirements Requirement Description The payload shall measure meteoritic smoke particle density P1 P2 The payload shall measure meteoritic smoke particle charge Mission Statement The payload shall be designed to conform to the RockSat 2010 User's Guide as set forth by Wallops Flight Facility Mission Statement P3 System Level Requirements Requirement Description The payload shall be able to detect meteoritic smoke particles S1 The payload shall be able to measure charge of meteoritic particles S2 S3 S4 S5 Parent Req. Mission Statement The payload shall be able to determine the angle of attack of the detector Parent Req P1 P2 P1 The payload shall convert detector output to a digital signal S6 The payload shall store the digital signal The payload shall perform in situ measurements from 75-95 km P1, P2 S6.1 The system shall record measurements for the entire duration of the flight S6 S7 The payload shall not alter the particles during measurement P1, P2 S8 The system shall fly on a sounding rocket with an apogee of at least 95 km P3 University of Colorado at Boulder RockSat 2010 5-7-2010 The payload shall survive the flight S8.1 S8.2 S8 The payload shall be able to perform with a temperature range of 60-100 degrees F P1, P2 The system shall characterize the flight environment S9 P1, P2 S10 The system shall make the measured data available after collection P1, P2 S11 The system shall be electrically isolated from the rocket P3 S12 The system shall be contained in a canister with a diameter of 9.3 inches and a height of 9.5 inches. P3 S13 The payload shall not weigh more than 20 lbs P3 S14 The system shall have a center of gravity that lies within a 1x1x1 inch envelope of the geometric centroid of the integrated RockSat payload canister P3 The structural requirements from the system requirements can be seen through P3 and S11-S14. The most important parts of these requirements is that the design must fit inside an aluminum canister provided by RockSat, and that the payload cannot weigh more than 20 lbs. Because the project consists of mostly electronics, and the science instruments are not contained within the canister, it was decided that the RockeSat project would only use half of a canister. The design, coordinated with canister partners (Virginia Tech), would there for be required to use half of the weight. Additionally, requirement S14 had to be coordinated so that the RocketSat assembly had the cg in the middle of the stack, so that when combined with Virginia Tech, the cg would fall into the envelope specified by the requirement. CDH also had several important system requirements S4, S5, S9-11. WFF required that the payload be electronically isolated from the rocket. A new requirement was that, instead of the electronics having no voltage or current on them before launch, WFF needed to know the status of the payload at all times. Additionally, a command line was made available, which imposed the requirements that the payload could be triggered by the RBF pin and g-switch, and also be turned on and off by the Wallops command line. Payload requirements for the CDH system are that it will store all signals on board and allow them to be retrieved by connecting to the electronics after the payload has been retrieved. The CDH needs sensors to monitor the flight environment, and sensors that will measure the attitude of the rocket. University of Colorado at Boulder RockSat 2010 5-7-2010 The Science system requirements are critical to the mission. Requirements S1 and S2 summarize the entire purpose of this system. Additionally, to collect the data for the mission, the measurements must be made in-situ, which is what leads to the requirement for a sounding rocket flight. The science instruments will have to be able to detect the particles but not interfere with the charge. Additionally, the instruments must be able to only detect the large particles, which means they will have to have a way to deflect the smaller particles, including ions and electrons. 2.3 Concept of Operations The payload will be launched on a Terrier-improved Orion Rocket out of Wallops Flight Facility. The rocket will reach an altitude of approximately 120 km, and then land in the Atlantic Ocean, where it will be retrieved. The payload will be turned on approximately 3 minutes before launch by the command line. The payload will begin sampling all sensors on board. After the rocket launches, all electronics will be latched on, and will continue taking data. No particle detection is expected during burnout, due to the flow that will be going over the detectors. After burnout, the most important area of the ascent will be from 75-95 km. The rocket will land in the ocean, and electronics will continue to run until the payload is retrieved, or until the battery power runs out. 3.0 Payload Design 3.1 Overall System Description The RocketSat VI system will be utilizing two graphite patch detectors and the electronics boards designed by the RocketSat VI Electrical team. The detectors will be mounted flush with the skin of the rocket for direct exposure to the atmosphere. The detectors will be connected to the electronics using RF cables. All electronics components will be secured in an aluminum canister provided by Wallops Flight Facility (WFF). The system will be recording data for the full battery life (no sequence is used to power down). This is because power down is not required for this mission. Data is stored on board will be read from the electronics memory after the payload is retrieved. A diagram of the payload integrated into the rocket is shown in the figure below. The detectors are positioned in ports two canisters below the RocketSat canister. There are two cables being used to connect to the detector. Each cable connects to the back of the detector through an SMA connector. The cables will then run up the longerons and into the canister. Because each CVA is enclosed in an aluminum box, a BNC connector will be used to interface with the electronics. University of Colorado at Boulder RockSat 2010 RSVI Can Cable connecting can and detector Detector Figure 1. Layout of canister and detectors in rocket 5-7-2010 3.2 Detector Design A modified electrometer called the Colorado Dust Detector will be used to detect these large aerosol particles. This electrometer is also called as a graphite patch detector, due to the large section of graphite located in the middle of the white plastic, as seen in Fig. 2. Figure 2. Graphite patch detector with aluminum casing Figure 3. Diagram of Detector This detector works very similarly to a regular electrometer. When a particle comes into contact with the graphite, the charge is deposited onto the graphite in the form of a current. The current signal is then transferred through the back of the graphite with a wire and is transmitted through a cable to electronics that convert and store the signal. For this type of detector, a higher current corresponds to a greater number of particles impacting the detector. This detector also requires direct exposure to the atmosphere, which means for rocket flights it must be mounted to the skin of the rocket [1]. The detector is designed specifically for larger aerosol particles. To avoid detection of small ions and particles with less mass, there are four magnets in the white plastic around the graphite. These magnets help repel charged particles with a radius less than 1 nm because small particles have less momentum than larger particles due to the smaller mass. Also, smaller particles such as stray ions are not as insulated as meteoritic smoke particles, which have a shell of ice formed around the nucleus of charge [3]. The distance that the charged particles are deflected by is defined by the Larmor radius [1], or gyroradius, equation: University of Colorado at Boulder RockSat 2010 5-7-2010 𝑟𝑔 = 𝑚∗𝑣𝑝𝑒𝑟𝑝 |𝑞|∗𝐵 (1) where rg is the radius of the particle, m is the mass of the particle, vperp is the velocity perpendicular to magnetic field, q is the charge of the particle, and B is the magnetic field. This equation defines the radius of the particles that will be deflected, and is based on the strength of the magnetic field produced by the magnets. The magnetic field is not 100% effective, though, due to the fact that as particles collide in the air, small ions can be deflected with enough speed to penetrate the magnetic field and hit the patch. Also, the formation of the boundary layer around the detector can affect how many particles impact the detector. This issue is accounted for in the data analysis, discussed in the Analysis section. The flight configuration being used for RocketSat VI has been used for a previous experiment on the MAGIC Sounding Rocket Mission. The detectors were donated to the team by Professor Zoltan Sternovsky of CU Boulder. The detectors were effective for this mission, and the results of the MAGIC mission are discussed in Expected Results. 3.1.1 Boundary Layer Effects on Particle Detection Due to the supersonic speed of the rocket, there was concern about the data collected being affected by the boundary layer formed on the detectors. This layer would reduce the efficiency of the detectors, therefore providing inaccurate results. A Direct Simulation Monte Carlo (DSMC) code was used to simulate the airflow around the detectors with inputs specifying the altitude and flight conditions. The simulation showed that particles with a diameter greater than 5 nm were not affected by the boundary layers formed on the detectors [1]. To account for the particles with a diameter greater than 1 nm (particles of interest) but less than 5 nm, a relatively small voltage bias of 2V is added into the data collection from the detectors. This voltage bias is important to account for aerosol particles affected by the boundary layer, as well as small ions that may not be deflected by the detectors due to particle collisions. 3.1.2 Attitude Determination The attitude of the rocket plays an important role in determining the numerical density of the particles at each altitude. While the boosters on the rocket are firing, there is no particle detection. This is because all of the airflow is parallel to the detectors. The rocket is being forced in one direction from the engines, which doesn’t allow any flow perpendicular to the detectors, allowing for particle detection. After burnout, the rocket is on a parabolic trajectory. At this point, it is no longer being forced in the direction of the nose cone. The rocket has velocity in the x and y directions, and it is the velocity in the x direction that is critical for the detectors. The longitudinal velocity, no longer forced in any direction, allows air to flow perpendicular to the detector. As the rocket spins, each detector will be exposed to this airflow. However, since the airflow on the detector is constantly changing, the attitude of the rocket needs to be measured at all times during data collection to determine how much airflow is hitting the detector, or the effective area of the detector [3]. The system devised for measuring attitude is using two MEMS analog gyroscopes to measure pitch, yaw, and roll. These components output the angular rate of the rocket, meaning that they are relative sensors as opposed to absolute. Accelerometers, measuring all three axes, will also be used to measure the attitude of the rocket. The gyroscope and accelerometer output will be integrated to determine the absolute attitude University of Colorado at Boulder RockSat 2010 5-7-2010 and velocity of the payload. An attitude algorithm will be used in analysis that will use quaternion models to determine the attitude of the rocket. 3.1.3 Error Analysis Some of the detectors being used during flight will output shifted data when used over a long period of time. In particular, the MEMS gyroscopes are known for having very high drift rates, especially on board sounding rockets. Some time will be spent to ensure that the data obtained during flight is not skewed by error from the detectors. The amount of error outputted from the gyroscopes will be measured by a spin test. This test will spin the payload, with the gyroscopes integrated, along the z-axis for a length similar to the length of flight. During the whole test the gyroscopes will be experiencing the same angular rate. After the testing, the data stored from the gyroscopes will be analyzed to see how much they drifted from the known angular rate of the spin table. This error analysis will later be implemented into the attitude determination code. The error will be utilized as a filter, to eliminate some of the error from the flight data. 3.2 Electrical System The electronics system must be capable of handling multiple data sets during flight for data analysis and control the payload. The system must be able to determine the attitude and velocity of the rocket during at least the ascent of the flight. The electronics will use gyroscopes to measure the pitch, yaw, and roll, and accelerometers to determine x, y, and z axis accelerations. The objective is to achieve six degrees of freedom attitude determination. It will also retrieve and store signals from the detectors to a nonvolatile memory for future analysis. As mentioned, a similar flight configuration has been used before, and Current to Voltage Amplifiers (CVAs, also known as Transimpedance amplifiers) will be used to convert the current output from the detector to a voltage signal. All signals must be stored into a flash memory so that they can be retrieved upon recovery of the payload. Additionally, the detectors must be sampled at a rate of 1 kHz to achieve the precision required for attitude determination. Additionally, pressure and temperature will be measured to monitor the flight environment. The system is divided into a total of five electronics boards: the AVR board, the SCIENCE board, the Mesospheric Particle Observation (MEPO) board, and two CVAs. The AVR, MEPO, and SCIENCE board each have a separate battery, for system redundancy. If a battery connection fails for one board, it can still draw power from the other boards. A single 9V battery would be sufficient to power all three boards for the entire 15 minute flight. The AVR board will be recording pressure, temperature, and accelerometer data. The AVR is a general board that has been used on previous RocketSat flights and is used in the RockOn Workshop. It has flight heritage, but modifications were required for this year’s mission. The accelerometers were replaced with versions that could detect a wider range of accelerations. This is due to the fact that the previous RocketSat flight experienced a shock that exceeded the range of the accelerometers and potentially knocked out the power on the board. It was difficult to determine the magnitude of the shock and therefore prove it was the cause of the power interrupt. The z-accelerometer is mounted separately from the AVR board and is connected using discrete wires. The board also had to be modified to be compatible with a command line that would power the payload on before launch. The command line is designed to meet the Wallops requirement. Wallops must be able to turn the payload on and off using a single command line for payloads wanting early activation in order to provide a safe environment for possible launch delays and removing the rocket from the launch pad. Typically the payload is triggered on by both the removal of the Remove Before Flight University of Colorado at Boulder RockSat 2010 5-7-2010 (RBF) pin and the g-switch (closed upon launch), however the gyroscopes being used for attitude data need to collect initial conditions of the rocket. The g-switch system has a delay to where the payload does not begin collecting data for more than 2 seconds after launch, by which time the rocket has already left the rail and could have changed attitude. The command line required an additional design and section on the AVR board. An initial revision of the board is shown in Fig. 4. Figure 4: Initial revision of the AVR board. The microcontroller is in the upper left corner of the board, and DB9 connectors for power and board to board connections are the two connectors on the lower edge of the board. The board uses 3.3V and 5V regulators to control power from a 9V battery, which is then used to power all of the components. An Atmega 32 microcontroller is used as the host to control the components on each board and most importantly sampling and handling data. The microcontroller is implemented using C basic as the core architect and Python to present a user friendly GUI to retrieve data, analyze latch status, and change timer settings. The software is developed in AVR studio provided by Atmel. The CVAs were provided by our faculty mentor, Zoltan Sternovsky. The CVA will take the current signal from the detector and amplify it, because it is so small, in the region of nano-amps. The CVA will then convert the amplified signal to a voltage signal, which is the output of the board. Each board has an output centered on 2.5V, and ranges from 0V to 5V. As previously discussed, one CVA has a voltage bias of 2V for analysis purposes. The schematics of each type of CVA were provided by Scott Knappmiller, and each circuit schematic (bias and no bias) will have to be analyzed to back out the original current signal for data analysis. The CVAs and their corresponding schematics are shown in Fig. 5. These boards are extremely sensitive and external signals can completely overshadow the actual signal. This means that the CVAs must be enclosed in some type of Faraday cage. Aluminum boxes have been used on previous flights, so smaller versions will be used to prevent any external signals from interfering with the detector signal inputted into the CVAs. University of Colorado at Boulder RockSat 2010 5-7-2010 Figure 5: The CVAs being used for flight and their corresponding schematics, provided by Z. Sternovsky and S. Knappmiller The MEPO board will be receiving the analog voltage signals from the CVAs, converts the analog signal to digital and then stores it onto a 64Mbit flash memory. This board is also controlled with a microprocessor. The board uses an external analog to digital converter to match the resolution of the current to voltage amplifier, and increase the sample rate to 1kHz to meet the sampling requirements for the detectors. The external analog to digital converter communicates to the host microcontroller through a serial to peripheral interface (SPI). The PCB of the MEPO is shown in Fig. 6. Figure 6. MEPO board with hardware latch installed and tested The SCIENCE board will be flying the gyroscopes. Each gyroscope has been mounted on a smaller breakout board, and each gyroscope board is mounted on two 1x5 headers to interface with the SCIENCE board. The PCB for the SCIENCE board is University of Colorado at Boulder RockSat 2010 5-7-2010 shown in Fig. 7. This is the newest revision of the board and has not been populated at this time. Figure 7: MEPO board before population Similar to the AVR and MEPO, the SCIENCE board also uses the same microcontroller and flash memory. The gyroscopes will be sampled at a rate of 300 Hz, which is enough to account for the minimum sample rate to avoid aliasing. . The LPY5150 and LPR5150 gyroscopes are both dual axis and MEMs technology. The maximum spin rate for the gyroscopes before saturation is 6000 degrees per second. The maximum expected spin rate experience during the rocket flight is 6Hz from previous flight data. 6Hz correspond to a spin rate of 2160 degrees per second which is well within the range and capability of the LPY5150 and LPR5150. This board also has a hardware latch to activate early, due to the fact that the initial conditions of the rocket are critical for analysis purposes. 3.3 Structural System The structure design for RocketSat VI is dictated by the constraints imposed by the flight provider, Wallops Flight Facility. The structure will be enclosed in an aluminum canister, secured to an internal structure within the rocket. Multiple universities utilize the canister system, and this year RocketSat VI will be sharing the canister with another university. The result is that the payload must weigh 6.55 pounds and have a height no greater than 6 inches, half the height of the canister. The design consists of two Makrolon plates, which is the same material that has been used on previous flights. The structure houses five electronics boards and four batteries. The Makrolon plates have a diameter of 9”, which leaves space between the edge of the plates and the inner diameter of the canister, which is 9.5”. The stack will be connected to the lid of the canister and extend downwards to a height of 5”, where the stack will be connected to the other university’s stack. A model of the layout of the stack is shown in Fig. 8. University of Colorado at Boulder RockSat 2010 5-7-2010 Figure 8. A SolidWorks drawing of our half of the canister payload and the stack outside of the canister Each Makrolon plate is separated by 2” stainless steel standoffs to allow for enough clearance for the electronics boards. The plates are complete circles without additional holes for wireways because the plates have extra clearance from the edge of the plates to the canister. The top plate on the stack will hold four lithium 9V batteries, the SCIENCE board, and the z accelerometer. The batteries will be secured individually by brass brackets, and secured with hot glue before flight. Three of the batteries will be connected to boards; the fourth is to balance out the others to keep the center of gravity in the middle of the stack. The SCIENCE board is mounted so that it is centered on the plate. This is so that the gyroscopes can provide data from the center of the rocket, otherwise conversions would be needed to translate the location, reducing the accuracy of the results. The plate layout is shown in Fig. 9. This board is mounted above the zaccelerometer, which is connected to the AVR board on the plate below. University of Colorado at Boulder RockSat 2010 5-7-2010 Figure 9. Top plate in stack with batteries, z-accelerometer, and SCIENCE board The lower plate contains the AVR, MEPO, and CVA boards. The MEPO board is mounted in the center of the plate, elevated slightly off the surface with nylon spacers. The AVR board is mounted directly above the MEPO board, again centered on the plate. The CVAs are mounted on opposite sides of the plate, and are connected to the MEPO board with wire connections secured by staking with hot glue, shown in Fig. 10. Figure 10. Second plate in stack with the AVR board mounted above the MEPO board, and two CVAs on either side of the MEPO The detectors will be mounted flush with the skin of the rocket. This required a special interface so that the detectors would be compatible with the Wallops rocket ports, and also one that would ensure the rocket was still water tight, as the payload section will land in the ocean. The mounting flange for the detector was designed by WFF, and the RocketSat Structures team was in charge of machining it to the specified tolerance from Wallops, 1/1000”. Both flanges have been completed, and a fit check was performed to ensure the detector fit in the flange. The result is shown in Fig. 11. University of Colorado at Boulder RockSat 2010 5-7-2010 Figure 11. Fit check for the detector and the flange machined in house Each detector will be connected to a separate CVA using an RF coaxial cable. The cable will be screwed into the back of the detector with an SMA connection. The cable will run up from the port with the detector to the payload canister, and is soldered to the CVA. The cable will be secured to the stack on two standoffs to ensure that if the cable is pulled it will not lose connection with the board. 4. Expected Results As previously discussed, a similar flight configuration has been used on a sounding rocket. This mission collected data in a polar region in Sweden. Fig. 12 shows the results of the MAGIC sounding rocket experiment combined with several other experiments collecting the same data. The dotted lines indicate a negative current. RocketSat VI hopes to collect data with a trend similar to that measured by the MAGIC experiment from the flight in June. We are also expecting that the numerical density of the particles will be much lower than those measured at higher latitudes, based on the models developed for the particle distribution globally. These models predict the particles are concentrated near the poles, but this has not been fully verified. The payload is scheduled to launch June 24, 2010. The teams are currently working on subsystems testing to prepare for systems testing and integration. Figure 12. Results of multiple sounding rocket flights measuring the numerical density of meteoritic smoke particles [1] University of Colorado at Boulder RockSat 2010 5-7-2010 4.0 Student Involvement PROJECT MANAGER Emily Logan – Project Manager, Aerospace Engineering sophomore, working on the team Fall 2009 – Summer 2010 The project manager is in charge of the entire RocketSat team. They help with finding a mission for the project, and help the team through all design and building processes. It is important for the project manager to have a baseline understanding of all subsystems in the project, because they are also acting as a Systems Engineer for the project. The manager also looks for funding and manages the budget for the project. They set the schedule, and are the primary contact for industry and Student Coordinators. MISSION SPECIALISTS Kirstyn Johnson - Mission Specialist lead, Aerospace Engineering freshman, Fall 2009 – Summer 2010 Andrew Fruge - Mission Specialist, Aerospace Engineering freshman, Spring 2010 Alex Harvey - Mission Specialist, Aerospace Engineering sophomore, Spring 2010 Marcell Smalley - Mission Specialist, Aerospace Engineering freshman, Fall 2009 – Summer 2010 Ryder Whitmore - Mission Specialist, Aerospace Engineering freshman, Spring 2010 Kyle Wolma - Mission Specialist, Aerospace Engineering sophomore, Fall 2009 – Spring 2010 Marcus Flores – Mission Specialist, Aerospace Engineering freshman, Fall 2009 University of Colorado at Boulder RockSat 2010 5-7-2010 The mission specialists focus on the science portion of the payload. They are in charge of learning and understanding the concepts and theories behind our mission and using this information to design the data collection system. The mission specialists consider all aspects of the flight that could affect how the data is collected, as well as the instruments themselves and how they will affect the data. A significant amount of testing has to be performed on the science system to characterize how the system will affect the data, and the mission specialists design and perform these tests. Finally, the mission specialists analyze the flight data and account for all inaccuracies in the measurements ELECTRICAL SYSTEMS Frankie Ning- Electrical Systems lead, Electrical Engineering junior, Fall 2009 – Summer 2010 Jared Yenzer- Electrical Systems lead, Electrical Engineering freshman, Fall 2009 – Summer 2010 Jordan Dickard- Electrical Systems, Aerospace Engineering freshman, Spring 2010 Michael Murry- Electrical Systems, Aerospace Engineering sophomore, Fall 2009 David Reid- Electrical Systems, Aerospace Engineering freshman, Spring 2010 The electrical team designs the circuits for the payload that will store all measured signals during flight. They have to account for power for each circuit board, and ensure that sample rates and data storage are sufficient to provide useful data to the team. The team is working with three separate boards that will collect data on temperature, pressure, attitude, and induced current on the science instruments. The main AVR is an old design, but the science and data acquisition board are being designed from scratch. The team will build, test and debug these boards throughout the semester. They are also working on selecting the right cable to transmit the signal from the detectors to the circuit boards. STRUCTURES Chris Young- Structures lead, Aerospace Engineering freshman, Fall 2009 – Spring 2010 James Bader- Structures, Aerospace Engineering freshman, Spring 2010 Nathaniel Frank- Structures, Aerospace Engineering freshman, Spring 2010 Chris LaPanse- Structures, Aerospace Engineering junior, Fall 2009 – Spring 2010 Michael Rice- Structures, Mechanical Engineering junior, Fall 2009 The structures team is in charge of designing the structure to meet the requirements of the flight provider and to support the electrical and science subsystems. They design the structure in SolidWorks, and must select all materials to ensure the structure does not fail. This year, the structures team had to work out a way to fit all of the electronics required for the mission in half of the flight canister, as the team is sharing the canister with another university. Also, the team must work with the flight provider to be able to mount the science instruments so that they are exposed to the atmosphere. The structures team will machine the flight layout, and test the structure for shock and vibrations. University of Colorado at Boulder RockSat 2010 5-7-2010 5.0 Testing Results 5.1 Electronics Testing 5.1.1 AVR Board The AVR board has undergone two revisions, and the second revision has passed POST testing, and the team has successfully stored data in the flash memory and read it back. This proves that the design for the AVR board is working, and the final revision for the PCBs will incorporate all of the modifications instated with the second revision. This includes the addition of several resistors on the board. The hardware latch was also modified with a resistor. These design changes were implemented for the final revision of the PCBs. 5.1.2 MEPO and SCIENCE Testing The MEPO and SCIENCE boards have also been tested with the new flash memory, and also using external ADCs. New code had to be implemented to use University of Colorado at Boulder RockSat 2010 5-7-2010 both the AVR converter and the external converter. The second revision testing of these boards showed that there was bus contention between the Flash and the ADC. A transmission gate was built on a breadboard and integrated into the PCB. This gate made it possible to switch between reading from the ADC and the Flash. This gate will be implemented on the PCB with an IC gate. Once the boards were tested with the transmission gate, the ADC sampled and data was read from the flash successfully. A realterm printout of these results is shown in the following figure. 5.1.3 CVA Testing The Current to Voltage Amplifiers (CVAs) were tested to determine functionality and ensure that the payload had backups. Two of the provided boards had blown opamps. The other four were characterized in the lab to determine the bias on the input, and how the output varies with input. The results from three circuit tests are shown in the following figure. It can be seen that all of the boards vary with input at 1V output per 1nanoamp of input. Additionally, circuits in the 80s have a 2.5 V bias on the input, and the 60s circuits have a bias on both the input and the output. University of Colorado at Boulder RockSat 2010 5-7-2010 Circuit 87. 2.5 V bias on the input Circuit 84. 2.5 V bias on the input University of Colorado at Boulder RockSat 2010 5-7-2010 Circuit 62. 2.5 V bias on the output and input The CVAs require ±15V rails to power the opamp and buffer. This power will be provided by the MEPO using a DC/DC converter. The CVAs were tested for functionality connected to the MEPO rails, and the board was powered and functioned as expected, similar to the characterization found using a power supply. 5.2 Detector Functionality Testing The detectors were initially tested for functionality by attempting to produce electrons in a vacuum to determine if the signal was discernable through any ambient noise. The test setup was putting the detector in a bell jar, pumping it down to 1 millibar, and running a high amount of current through a tungsten wire, which would emit electrons. The detector would be tested with and without magnets to check that the magnets are effective. The test, although inconclusive overall due to blown CVAs and that the bell jar was not pumped down enough, provided several insights to the system setup. The use of shielded cables is critical for prevent signal interference. Without all connections between the CVA and detector shielded, the output would be a 60 Hz wall signal that was sensitive to air movement and vibrations. The test also revealed that the CVAs were not working. This test was completed to demonstrate whether the graphite patch detectors were able to pick up a charge from a source, via the graphite, and convert this charge to a current. The ability of the detectors to pick up a charge from what it interfaces with, and then convert this to a current, is crucial to the mission. During flight, if the detectors are not able to pick up a charge from atmospheric particles, then the mission will be unsuccessful. Therefore, it is vital University of Colorado at Boulder RockSat 2010 5-7-2010 to know whether the detectors are working properly. This test was also useful in determining whether the detectors and the CVAs (current to voltage amplifiers) worked in unison to take the current produced from the graphite patch detectors and convert it to a voltage. The detector was initially tested by connecting one of the detectors to an oscilloscope with a co-axial cable. The detector was allowed to pick up a signal from just the ambient noise of the room. As seen from Figure 1 below, the Vpp (voltage peak-to-peak) was 1.00 V. Also, the frequency of this signal was at about 60 Hz, which is believed to correspond to the frequency of the power coming from the wall outlets. Figure 13. Ambient Noise Test There were a few other tests that were done to compare their oscilloscope output to the “ambient noise” test. A soldering iron was used to test how the electronics from other appliances affected the charge that the detector picked up. The Vpp from the soldering iron test (Figure 2) was higher than from just the ambient noise test, with a value of 14.80 V. Figure 14. “Soldering Iron” Test University of Colorado at Boulder RockSat 2010 5-7-2010 The detector was also placed near a set of wall outlets to see what signal it would pick up at this location. The Vpp from this location (Fig. 14) was 14.40 V. Figure 15. Wall Outlet Signal The two signals from the soldering iron and the wall outlets were very similar in terms of their square waveform and their Vpp. This can be justified since the soldering iron used the wall outlets as its power source. The changes in signal that can be seen from each of these three tests supports the conclusion that the graphite patch detectors are picking up a charge/signal from around the room. As soon as the detector was unhooked from the CVAs, the Vpp that was read was 20 mV. This change in Vpp between the connection of the CVAs and the detector, and then subsequently the loss of the connection, leads to the conclusion that the detector was the one picking up the signal. Also, it was apparent that the coaxial cable being used for this connection was not contributing to picking up a signal. Any disturbance in the cable did not affect the waves seen on the oscilloscope. Also, if the cable was picking up noise in addition to the graphite patch detector, then it would have still transmitted a substantial signal to the oscilloscope when the detector was disconnected from it. Overall, this test can be used as evidence that the graphite patch detectors are ready for launch, and are expected to output a signal during the entirety of flight. 5.3 Structures Testing Structures will be performing a vibe test with the integrated payload. The purpose of this test is to check the ballast design, and ensure that the plates will not crack. Additionally, the test will check power connections between boards and from the batteries to the boards, to ensure that everything is secure and will not be interfered with during flight. A shock test will also be used to simulate any shocks the payload may experience during flight, particularly when the second engine ignites. The entire payload will be dropped from a small height so that the stack is decelerated. The accelerometers will record the magnitude of this deceleration, and the test will be repeated until a deceleration of 40g is measured. This will test the power connections, and potentially the software latch written for this year’s flight. University of Colorado at Boulder RockSat 2010 5-7-2010 6.0 Mission Results (4-??? pages) This is your second major section. This section should detail your results with pictures, tables, graphs etc. This section should leave the reader with a sense of how well your payload performed and why it performed the way it did (or didn’t). This is the most important section of your report and should communicate how well your payload performed. What was learned? Did the payload function as designed. If the payload did not function as designed, failure analysis should be completed for lessons learned. Will the data you retrieved be used for a larger purpose? (i.e publication) 7.0 Conclusions (0.5 to 1 page) This section should make conclusions from Section 6.0. This section may be difficult for those that did not get any data. If that is the case, use this section to discuss your payload failure and how your team determined the cause of failure (a summary of your full failure analysis in Section 6.0.) 8.0 Potential Follow-on Work (0.5 to 1 page) This section should discuss briefly how this mission could continue and if it is worth continuing. A brief list of improvements or ways to learn and discover further information should be listed. 9.0 Benefits to the Scientific Community (0.5 to 1 page) This section is pretty obvious. Discuss how and why this mission could be applied to current research in its field. Don’t be afraid to go out on a limb with your statements. 10.0 Lessons Learned (1 to 2 page(s)) Use this section to discuss what you learned from this experience and what you would not let happen if this payload were flown again. This discussion should stay focused on your mission and not so much on the program logistics. This section is extremely important because future participants will probably look at your mistakes and try to learn from them. Lessons learned are an essential part of the final documentation of a project to ensure the advancement of those involved as well. JPL puts a large value on Lessons Learned in its programs. 11.0 Appendices 11.1 Subsystem Requirements Detector Subsystem Requirements Requirement Description The payload shall have a detector that measures particles every meter from 75-95 km DS1 Parent Req S1 The detector shall be able to sample at a rate of 1 kHz DS1.1 University of Colorado at Boulder RockSat 2010 DS1 5-7-2010 The detector shall be activated at launch DS1.2 DS1 The detector shall only register particles with a diameter larger than 1 nm DS2 S1 The detector shall produce a different output for positive and negative charge DS3 S2 The payload shall determine the attitude of the detector with a precision to at least 1 degree DS4 DS4.1 DS5 DS5.1 DS6 S3 The attitude determination system shall be activated at launch DS4 The attitude shall be detected every 1 meter from 75 to 95 km S3 The payload shall be able to sample the attitude at a rate of 1 kHz DS5 The system shall amplify current reading and convert to voltage CDH6 The system shall have current/voltage amplifier outputs +/- 10 V DS6.1 DS7 DS6 The attitude determination system shall be internal to the payload S3 The attitude determination system shall not interfere with internal electronics DS8 S3 The power subsystem shall provide 250 mW of power to the attitude determination system DS9 Structures Subsystem Requirements Requirement Description The system shall use building materials that can withstand a temperature of at least 100degC S3, DS4 ST1 S8.1 Parent Req The sytem shall use building materials that can withstand Gloading of at least 25 G ST2 ST3 S8.1 The system shall support CDH boards with nonconductive material CDH6 The system shall secure the CDH boards to the canister ST4 University of Colorado at Boulder RockSat 2010 S8.1 5-7-2010 The system shall secure connections between boards in a way that ensures gforces will not disrupt power ST5 CDH Subsystem Requirements Requirement Description Accelerometers (xyz axis) shall record +/- 50 G significant events CDH1 S8.1, S1-S5 Parent Req S9 Shall be sensitive from 0 t0 5V with 2.5V offset CDH1.1 CDH1.2 CDH2 Shall have a sensitivity of 27mV/G Accelerometers (xyz axis) shall record +/- 1.7G vibrations CDH1 CDH1 S9 Shall be sensitive from 0 t0 5V with 2.5V offset CDH2.1 CDH2.2 CDH3 Shall have a sensitivity of 1V/G The payload shall record temperature from -40 degC to 125 degC CDH2 CDH2 S9 Shall use analog output voltage .1-1.75 V range CDH3.1 CDH3 The payload shall record pressure from 0-15 psi CDH4 CDH4.1 S9 Shall output from 0 t0 5V with a sensitivity of .267V/psi precision CDH4 The system shall be able to sample at 1 kHz CDH5 CDH5.1 DS1.1, DS6.1 The ADC shall have a throughput rate much greater than 1kHz CDH5 The SPI bus must be able to process 16kbit/s CHD5.2 CDH5 The system shall be able to store all digital values received from detector, attitude determination system, and all sensors in flash memory CDH6 CDH6.1 S10 The system shall use SPI bus from ADC microcontroller to flash memory CDH6 The system shall read bipolar -10V to 10V analog signals from the current to voltage amplifier CDH6.2 CDH6.3 CDH6, DS6 The system shall be able to convert the analog signals to digital signals University of Colorado at Boulder RockSat 2010 CDH6 5-7-2010 The system shall record all freedoms of attitude of the payload CDH7 DS4, DS7 The system shall measure the zenith and polar angles. CDH7.1 CDH7 CDH7.2 The attitude determination system shall sample faster than 6Hz CDH7 CDH8 The smoke particle detector shall output a nano-amp of current DS1 CDH8.1 The nano-amp shall be converted and amplified to an output voltage of +/- 10v CDH8 The system shall activate prior to launch through the removal of the RBF pin and command line from WFF, or through the triggering of the G-switch CDH9 11.2 S6 Final Electronics Schematics Please try to keep with this format so it is easier for the reviewers. Please keep same font and section names. These reports are due no later than July 16, 2010 at 5:00 PM. Reports will be reviewed by Chris or Shawn. You may be asked for revision changes before they are posted online in final form. Please contact Chris Koehler or Shawn Carroll with any questions or concerns at [email protected] 303-378-4765 or [email protected] 720-234-4902. We understand that documentation isn’t the most exciting thing in the world, but completing this report will not only help bring closure to your project, but will preserve your effort. This completed report is a great resume builder, and will be of great benefit to future program participants. University of Colorado at Boulder RockSat 2010 5-7-2010