Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
THE ELEMENTS OF PARAMETRICAL REGULATION THEORY FOR
COMPUTABLE GENERAL EQUILIBRIUM MODELS
(A Research Paper)
Abdykappar Ashimov, Bahyt Sultanov, Zheksenbek Adilov, Yuriy Borovskiy,
Nikolay Borovskiy, Askar Ashimov
ABSTRACT
Purpose
The paper presents some results of the development of parametrical regulation theory elements
for computable general equilibrium models (CGE models) with taking into consideration their
peculiarities.
Design/methodology/approach
Theoretical results have been obtained by means of applying geometrical methods for variational
problems and methods of the theory of discrete dynamic systems. These results have been used for
solving concrete practical problems.
Findings
We proved a statement on the existence of solution for variational calculus problem on the choice
of the optimal laws of parametrical regulation within the given finite set of algorithms for discrete
dynamic systems.
There has been proved a statement on sufficient conditions for the existence of an extremal’s
bifurcation point of variational calculus problem on the choice of the optimum laws of parametrical
regulation within the given finite set of algorithms for discrete dynamic systems.
There have been defined optimal laws of parametrical regulation (on the level of one and two
parameters) of economic system evolution on the basis of the examined mathematical model.
The bifurcation line was constructed for the given area of uncontrolled parameter values.
Practical implications
The research results can be applied for the choice and realization of the effective budget and tax
state policy.
Originality/value.
There have been elaborated the elements of parametrical regulation theory of economic system
development on the basis of CGE models.
The effectiveness of parametrical regulation theory application on the example of one of CGE
model has been shown.
KEY WORDS
CGE models, parametrical regulation, and extremal bifurcation.
1. Introduction
State economic system can be described by systems of non-linear ordinary differential equations
(Khrustalev et al., 1993)
dx
f ( x, u, ), x(t 0 ) x0 .
(1)
dt
x ( x1 , x 2 ,..., x n ) X R n is the vector of systems state; u (u1 , u 2 ,..., u l ) W Rl is the vector of
controlled (regulated) parameters; W , X are compact sets with nonempty interiors: Int (W ) and Int ( X )
relatively; (1 , 2 ,..., m ) R m is the vector of uncontrolled parameters; is the open
1
connected set; mapping f ( x, u, ) : X W R n and
f f f
, ,
are continuous in X W ;
x u
t 0 , t 0 T is the fixed interval (of time).
Economic systems descriptions may also be presented by computable general equilibrium models
(CGE models) (Makarov et al., 2007; Thissen, 1998; Peter et al., 2001). CGE model (Makarov et al.,
2007) can in general be described by a system of relations which can be divided into subsystems as
follows.
1) Subsystem of difference equations connecting values of endogenous variables for two
consecutive years:
(2)
xt 1 F ( xt , yt , zt , u, ) .
n
~
t is the number of year and the discrete time, t 0, 1, 2,...; xt ( xt , yt , zt ) R is the vector of system’s
endogenous variables; xt ( xt1 , xt2 ,..., xtn1 ) X 1 ; yt ( yt1 , yt2 ,..., ytn2 ) X 2 ; zt ( zt1 , zt2 ,..., ztn3 ) X 3 ;
n1 n2 n3 n ; variables x t include values of capital funds, agents’ fund balance on the bank
accounts and the others; variables y t include values of agents’ supply and demand on different
markets, variables z t include different kinds of market prices and the budget share on the markets with
state prices for different economic agents; u and are vectors of exogenous parameters;
u (u1 , u 2 ,..., u l ) W Rl is the vector of controlled (regulated) parameters; X1, X2, X3, W are compact
sets with nonempty interiors: Int ( X i ) (i=1, 2, 3) and Int (W ) relatively; (1 , 2 ,..., m ) R m is
the vector of uncontrolled parameters, is the open connected set; F : X 1 X 2 X 3 W R n1 is
the continuous function.
2) Subsystem of algebraic equations describing the agents behavior and interaction on different
markets for a chosen year. These equations assume variables y t expression through exogenous
parameters and the rest endogenous variables:
yt G ( xt , zt , u , ) .
(3)
G : X 1 X 3 W R n2 is the continuous function.
3) Subsystem of recurrent relations for iterative calculations of market prices’ equilibrium values
on different markets and budget shares on the markets with state prices for different economic agents:
zt [Q 1] Z ( zt [Q], yt [Q], L, u, ) .
(4)
Q=0, 1, 2,… are the iteration numbers. L is a set of positive numbers (adjustable iteration constants).
Decreasing their values the model quickly reaches the equilibrium; however, in this case the danger of
prices departure into the negative area is increased. Z : X 2 X 3 (0,) n3 W R n3 is the
continuous mapping (compressing for fixed xt X 1 , u W , and some fixed L). In this case
mapping Z has a single stationary point to which the iterative process (4, 3) converges.
CGE model (2, 3, 4) under values of exogenous parameters for every moment of time t defines
xt , corresponding to supply and demand prices equilibrium on agents’
values of endogenous variables ~
goods and services markets within the following algorithm.
1) On the first step it is supposed that t=0 and the initial values of variables x0 are set.
2) On the second step for current t the entry variables values z t [0] are given on different markets
and for different agents; values yt [0] G( xt , zt [0], u, ) are calculated by (3) (of agents’ demand and
supply initial values on the markets of goods and services).
2
3) On the third step for current t iterative process (4) is started up. For every Q the current values
of supply and demand are found from (3) ( yt [Q] G( xt , zt [Q], u, ) ) with the help of corrections of
market prices and budget shares of economical agents.
The condition of iterative process completion is the equalities of supply and demand values on
different markets. As results there are defined the equilibrium values of market prices on each market
and budget shares on markets with state prices for different economical agents. We omit index Q for
such equilibrium values of endogenous variables.
4) On the next step by the obtained equilibrium solution for the t moment with (2) difference
equations the values of x t 1 variables are found for the following moment of time. The t value is
increased by one. Go over to the step 2.
The number of iterations 2, 3, 4 repetitions is defined in accordance with calibration tasks,
forecast and regulation for the pre-selected time intervals.
In (Ashimov, Sagadiyev et al., 2008; Ashimov et al., 2009) the theory of parametrical regulation
(within mathematical models given by systems of non-linear ordinary differential equations) has been
suggested and its effectiveness has been shown on a number of examples (Ashimov et al., 2007;
Ashimov, Iskakov et al., 2008)
Spreading of the obtained results of parametrical regulation theory (within non-linear ordinary
differential equations systems) to class of CGE models requires to take into account the fact that
models of such class are semi cascades. Therefore there exists the necessity of generalization of
previously obtained results (of parametrical regulation theory for systems of non-linear ordinary
differential equations) on the examined class of CGE models. In the paper some results of the
development of parametrical regulation theory (taking into account CGE models peculiarities) and the
example of this theory application are presented.
2. Elements of parametrical regulation theory for the class of CGE models
The examined CGE model may be presented in the form of continuous mapping
n
( f : X W R ), giving transformation of values of endogenous variables of the system for the
zero year to the appropriate values for the next year according to the algorithm given above. Compact X
in the phase space of endogenous variables is defined by set of possible values of variables x (compact
X 1 with nonempty interior) and by appropriate equilibrium values of y and z variables which are
calculated by relations (3) and (4).
x0 ) X1 Int ( X 1 ) in fixed
We’ll assume that for chosen point x0 Int ( X 1 ) the including xt f t ( ~
u Int (W ) and for t 0 N is correct (N - fixed natural number). This mapping f defines
discrete dynamic system (semi cascade) in set X:
{ f t , t 0,1,... }.
(5)
x the points of appropriate trajectory ~x f t ( ~x ) of semi cascade for the chosen
We mark as ~
*t
t
( n l )( N 1)
0
xt , u t ) for
((N+1) sets of variables ( ~
u* Int (W ) . We mark as the closed set in the space R
t 0 N ) defined by limitations
~
xt X , ut W , ~
xt j ~
x*tj j ~
x*tj .
(6)
j
j
~
The last inequalities in (6) are used for several values j 1 n and for positive x*t , 0 .
x ) 0 be a finite set of continuous for ~
x X real-valued
Let { H i ( ~
x ) : i 1 p } and I ( ~
functions. The possibility of choice of optimal sets of parametrical regulation laws on set of
3
combinations from l parameters by r and for finite trajectory ~
x*t ( t 0 N ) is investigated within the
framework of the following algorithms (laws of control):
U ij kij H i ( ~x ) u*j , i 1 p, j 1 l.
(7)
k ij 0 are adjustable coefficients, u* are values of regulated parameters admitted or estimated by
calibration results.
The use of the set of r laws U ij from (3) ( 1 r l , r is fixed here and further) in fixed kij for
j
semi cascade given by mapping f means the substitution the set of functions { u
js
U i j } for r of
s s
different indexes values j s ( 1 s r , 1 js l , 1 is p ) in coordinate functions of this mapping. The
j
rest parameters u (where j isn’t included in the appointed set of values j s ) are considered to be
j
constant and equal to values u* . We will mark as u t the values of parameters vectors u obtained with
the help of regulation laws (7) for the time t. Coordinates of this vector are equal to
~
utj k ij H i ( x t ) u*j , j 1 l .
We will examine the following objective functional (criterion):
N
K I (~
x ).
(8)
t
t 1
for trajectories of semi cascade (5) by using r laws of control { u js U is js }.
The problem definition of choice of a set of parametrical regulation laws on set of sets from r
parameters in the given set of algorithms (7) for semi cascade (4) looks as follows. At fixed
find the set of r laws U ={ U is js , s 1 r } (and their coefficients) from a set of algorithms (7) which
provides the upper boundary of criterion values (8):
(9)
K sup .
U
The following theorem is true.
Theorem 1. There exists the solution to the problem of finding the upper boundary of criterion
KN :
N
I ( ~xt )
t 1
sup
.
(10)
( ki1 j1 , ki2 j2 , , kir jr )
for the appointed semi cascade (5) by using any chosen set of laws U ={ U i s j s , s 1 r } (where
r l ) from the set of algorithms (7) by constraints (6). The task (5-9) has the solution for the finite set
of algorithms (7) and chosen r, 1 r l .
The proof of this theorem with some changes (taking into account CGE models peculiarities)
revises the proof of the analogous theorem for the case of flow (Ashimov et al., 2009).
Let’s determine the following definition characterizing such values of uncontrolled parameter
in which the replacement of one optimal set of regulation laws into another is possible.
Definition. The value * is called the bifurcation point of extremal of the task (5-9) if in
* there exist as minimum two different optimal sets from r laws from a set (7) differing at least on
one law U ij and in every neighborhood of the point * such value is found for which the task
(5-9) has a single solution.
The following theorem gives sufficient conditions for existence of the bifurcation point of
extremals of the examined variational problem of choosing parametrical regulation laws within the
given finite set of algorithms.
4
Theorem 2. (on the existence of bifurcation point). Let the task (5-9) have the corresponding
single solutions for two different optimal sets of r laws from the set (7) differing at least on one law U ij
for the parameters values 1 and 2 ( 1 2 , 1 , 2 ). Then there is at least one bifurcation point
* .
The scheme of this theorem proof is similar to the proof scheme of the appropriate theorem in
(Ashimov et al., 2009).
3. Example
3.1 Defining of parametrical regulation optimal laws on the basis of CGE model with the
sector of knowledge
The effectiveness of the obtained theoretical results is illustrated below on the example of CGE
model with the sector of knowledge (Makarov et al., 2007). This model is presented within: relations
(2) by twelve expressions ( n1 12 ); relations (3) by 88 expressions ( n2 88 ); relations (4) by ten
expressions ( n3 10 ). The examined model contains 86 exogenous parameters and 110 endogenous
variables.
The results of application of approach of parametrical regulation theory are compared with the
results of application of scenario approach 2 for regulation of market economy development on the
example of the economy of Russian Federation. In (Makarov et al., 2007) as a development scenario
there has been admitted the annual growth of financial investments from state budget in the innovative
s
sector of economy and also in the sector of science and education ( G ) in 2 times for 8 years (2007 –
2015) without taking into consideration the level of consumer prices. As a result the application of this
approach according to (Makarov et al., 2007), the value of GDP (of constant prices of 2007 here and
further) grew by 4.90% (2007 – 100%) in 2015 in comparison with the base variant which assumes the
inertia economy development without any additional financial investments. The GDP calculations
results in this experiment are presented in the fig. 1 (graph 1).
However, in this scenario approach the level of consumer prices grows by 22.19% (2015 – 100%)
in 2015 in comparison with the base variant. That wasn’t marked in the scenario results examined in
(Makarov et al., 2007).
Within application of parametrical regulation approach the optimal laws were chosen from the
following set of algorithms of type (7):
~
xi ~
x0i
(11)
U
k
u*j , i 1 11, j 1 l .
ij
ij
i
~
x0
u*j are the values of regulated parameter admitted or estimated by calibration results. In these laws
there are used such phase variables ~x i , as:
– GDP of each of three sectors and the whole economic system;
– levels of different kinds of prices being in the model;
– production funds of three sectors of economic system.
The average value of the country’s GDP for 2008 – 2015 in constant prices of 2007 was used as
the criterion K (8).
The application of parametrical regulation approach on the basis of appointed the model
(Makarov et al., 2007) was carried out in the following sequence of computing experiments.
5
1) Defining the optimal law (in the sense of the criterion K) from a set (11) for financial
investments from the state budget in the innovative economy sector and also in the sector of science
and education ( G s ) on the basis of CGE model with the sector of knowledge.
The obtained optimal law of parametrical regulation looks as follows:
Y Y0
G s 1.19 t
1G s* ,
Y0
where Yt is the GDP output per year t. The sign (*) corresponds to admitted or estimated values of
controlled parameters according to the results of calibration. By using the obtained law the country’s
GDP grows by 7.38% in 2015, the level of consumer prices increases by 24.67% in 2015 in comparison
with the base variant. The GDP calculations results in this experiment are presented in the fig. 1 (graph
2).
2) Defining the optimal law (in the sense of the criterion K) from a set (11) for financial
investments from the state budget in the innovative economy sector and also the sector of science and
education ( G s ) on the basis of CGE model with the sector of knowledge 2 with constraints imposed
on consumer prices growth.
In the paper the limitation of type (6) for the levels of consumer prices looks as follows:
pt pt* pt* ,
*
where pt is the level of consumer prices with parametrical regulation; pt is the level of consumer
prices of the base variant; 0.09 . This inequality means that in using the parametrical regulation the
increasing of the level of consumer prices is assumed in comparison with the base variant (without
parametrical regulation) no more than by 9% for the whole time interval of regulation. The obtained
optimal law of parametrical regulation looks as follows:
Y Y
G s 0.46 t 0 1G s* .
Y0
By using this law the country’s GDP grows by 2.83% in 2015, the level of consumer prices
increases by 8.80% in 2015 as compared to the base variant.
3) Defining the optimal law (in the sense of criterion K) from a set (11) for financial investments
from the state budget in the innovative economy sector and also in the sector of science and education
and for the rate of one of taxes on the basis of CGE model with the sector of knowledge with the
constraints imposed on consumer prices growth.
The obtained optimal law of parametrical regulation on organizations profit tax T pr looks as
follows:
Y Y
T pr 2.29 3,t 3, 0 T pr* .
Y3, 0
Y3,t is the GDP output of the third sector of other branches of economy per year t.
Applying the stated parametrical regulation optimal law for organizations tax profit T pr the
country’s GDP grows by 17.79% in 2015, the level of consumer prices falls by 16.75% in 2015 as
compared to the base variant.
4) Defining the optimal pair of laws (in a sense of criterion K) from a set (11) with the limitation
on consumer prices growth. Here the first law of the pair is used for regulation of financial investments
from the state budget in the innovative economy sector and also in the sector of science and education
G s , the second law is used for regulation of the rate of one of taxes.
The obtained optimal pair of laws of parametrical regulation looks as follows:
6
Y Y
Y Y
G s 0.46 t 0 1G s* , T pr 2.16 3,t 3, 0 T pr* .
Y3, 0
Y0
Applying the optimal pair of laws of parametrical regulation of parameters ( G s , T pr ) the
country’s GDP increases by 19.34% in 2015, the level of consumer prices falls by 13.3% in 2015 as
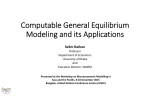
compared to the base variant. The GDP calculations results in experiments 3 and 4 are also presented in
the fig. 1 (graphs 3 and 4 relatively).
Fig. 1. The graphs of changes of the Russia GDP relative to the base variant of economy
development, in percentage terms.
3.2 The investigation of the dependence of parametrical regulation optimal laws on values
of uncontrolled parameters
Let’s examine the dependencies of choice results of parametrical regulation laws on the level of
the parameter T pr (tax rate on organizations profit) on two uncontrolled parameters: Pb % (the rate on
deposits for enterprises) and O3pn1 (the budget share spending on purchasing of the innovative goods),
which values belong to the area (rectangular) on the plane. Let’s also define possible bifurcation
points for the examined variational problem on choosing the parametrical regulation optimal law for
the examined CGE model.
As the computing experiment result there have been obtained the graphs of optimal value
dependencies of criterion K from the values of parameters ( Pb % , O3pn1 ) for each of 11 possible laws U i .
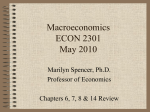
In the fig. 2 there have been presented the graphs for laws U 1 and U 2 which give the largest criterion
values in area , the line of intersection of these surfaces and projection of the line of intersection on
the area of parameters values ( Pb % , O3pn1 ). This projection consists of bifurcation points of parameters
( Pb % , O3pn1 ). It divides the rectangle in two parts. In one of the parts the law of control
K K 2, 0
U 1 T pr k1 2,t
T pr*
K 2, 0
7
is optimal, and in the other part the law of control
Y Y
U 2 T pr k 2 3,t 3, 0 T pr*
Y3, 0
is also optimal.
Both laws are optimal on the line of projection. Here K 2 is capital funds of the innovative sector,
Y3 is the GDP of the third sector of other branches of economy, k1 , k2 are nonnegative adjustable
coefficients of the laws.
As the result of this research of the dependence of the results on the solution of the examined
variational calculus problem on values of uncontrolled parameters ( Pb % , O3pn1 ), the following approach
to the choice of parametrical regulation optimal laws is possible. If the values of parameters ( Pb % , O3pn1 )
are on the left from the bifurcation line in the rectangle (fig. 2) then the law U 1 is recommended as
the optimal law, and if the parameters values ( Pb % , O3pn1 ) are on the right from the bifurcation line in the
rectangle then the law U 2 is recommended as the optimal law. If parameters values ( Pb % , O3pn1 ) are
on the bifurcation line in the rectangle then any law from U1 , U 2 may be recommended as the
optimal law.
Fig. 2. The graphs of dependence of the criterion K for two optimal laws from uncontrolled
parameters ( Pb % , O3pn1 ).
8
4. Conclusion
1. Some results of the development of parametrical regulation theory taking into account CGE
model peculiarities are presented.
2. The application efficiency of parametrical regulation theory on the example of one of CGE
models is shown. There have been suggested the optimal laws of parametrical regulation of economic
system development on the basis of examined mathematical model.
3. The bifurcation line is constructed for the given range of uncontrolled parameters values.
4. The obtained results may be recommended for elaboration and implementation of the effective
state policy.
References
Ashimov, A.A., Borovsky, Yu.V., Sultanov, B.T., Iskakov, N.A. and Ashimov, As.A. (2009),
The elements of parametrical regulation theory of economical system evolution of a country,
Physmathlit, Moscow (in Russian).
Ashimov, A.A., Iskakov, N.A., Borovskiy, Yu.V., Sultanov, B.T. and Ashimov, As.A. (2008),
“On the development of usage of the market economy parametrical regulation theory on the basis of
one-class mathematical models”, Proceedings of 19th International Conference on Systems Engineering
ICSEng, Las Vegas, Nevada, USA, pp. 43-48.
Ashimov, A.A., Sagadiyev, K.A., Borovskiy, Yu.V., Iskakov, N.A. and Ashimov, As.A. (2007),
“Multi-targeted parametrical regulation of market economy development with the account of noncontrolled parameters influence” in Proceedings of the 10th IASTED International Conference on
Intelligent Systems and Control, Cambridge, Massachusetts, USA, pp. 280-284.
Ashimov, A.A., Sagadiyev, K.A., Borovskiy, Yu.V., Iskakov, N.A. and Ashimov, As.A. (2008),
“On the market economy development parametrical regulation theory”. Kybernetes. Vol. 37 No. 5, pp.
623-636.
Khrustalev, M.M., Matrosov, V.M., Arnautov, O.V., Bagrinovsky, K.A., Detneva, E.V. and
Krotov, V.F. (1993), “On highly aggregated model of the development of Russia”, in preprints of the
Second International Workshop “Analysis of development instability on the base of mathematical
modeling”, Moscow, pp. 182-234.
Makarov, V.L., Bakhtizin, A.R. and Sulakshin, S.S. (2007), The application of computable
models in state management, Scientific expert, Moscow, (in Russian).
Peter, M.W., Horridge, J.M., Meagher, G.A., Naqvi, F., Parmenter, B.R. and Adams P.D. (2001),
MONASH-MRF: A Multisectoral, Multi-regional Model of the Australian Economy, mimeo. Monash
University, Victoria 3800, Australia.
Thissen, M. (1998), A Classification of Empirical CGE Modelling, SOM Research Report
99C01, University of Groningen, the Netherlands.
9