Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Control system wikipedia , lookup
Current source wikipedia , lookup
Thermal runaway wikipedia , lookup
Alternating current wikipedia , lookup
Voltage optimisation wikipedia , lookup
Buck converter wikipedia , lookup
Transformer wikipedia , lookup
Mains electricity wikipedia , lookup
Magnetic core wikipedia , lookup
Voltage regulator wikipedia , lookup
Geophysical MASINT wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Ignition system wikipedia , lookup
Transformer types wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Rectiverter wikipedia , lookup
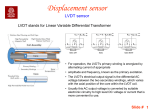
THE LINEAR VARIABLE DIFFERENTIAL TRANSFORMER (LVDT)
The Linear Variable Differential Transformer (LVDT) is a displacement measuring instrument
and is not a strain-based sensor.
The LVDT models closely the ideal Zeroth-order displacement sensor structure at low
frequency, where the output is a direct and linear function of the input.
The LVDT is a variable-reluctance device, where a primary center coil establishes a
magnetic flux that is coupled through a mobile armature to a symmetrically-wound
secondary coil on either side of the primary.
Two components comprise the LVDT: the mobile armature and the outer transformer
windings. The secondary coils are series-opposed; wound in series but in opposite
directions.
When the moving armature is centered between the two series-opposed secondaries, equal
magnetic flux couples into both secondaries and the voltage induced in one half of the
secondary winding is balanced and 180 degrees out-of-phase with, the voltage induced in
the other half of the secondary winding.
The balanced condition provides total cancellation of secondary voltages and therefore zero
voltage output. When the moveable armature is displaced from the balanced condition,
more magnetic flux will couple into one half of the secondary than into the other producing
an imbalance voltage output at the primary coil excitation frequency. The output voltage of
the LVDT is therefore a direct function of the displacement of the mobile magnetic
armature. The LVDT is, by definition, a transformer and requires an oscillating primary coil
input.
The DC LVDT is provided with onboard oscillator, carrier amplifier, and demodulator
circuitry. The AC LVDT requires these components externally. Due to the presence of
internal circuitry, the DC LVDT is temperature limited operating from typically -40 C to +120
C.
The AC LVDT is able to tolerate the extreme variations in operating temperature that the
internal circuitry of the DC LVDT could not tolerate. Typically, LVDT’s will be excited by a
primary carrier voltage oscillating at between 50 hertz and 25 Kilohertz with 2.5 Kilohertz as
a nominal value. The carrier frequency is generally selected to be at least 10 times greater
than the highest expected frequency of the core motion.
The external housing of the LVDT is fabricated of material having a high-magnetic
permeability therefore desensitizing the device from the effects of external magnetic fields.
No sensing spring element exists within an LVDT and therefore, the output of the sensor is
hysteresis-free. Some LVDT displacement measuring sensors are, however, provided with
internal armature return springs to allow profile measurement. When there exists no direct
contact with the moving armature is allowed no mechanical wear results. The provision of
linear bearings to prevent armature to coil structure contact and to limit wear can greatly
extend LVDT operating life expectancies.
The strong relationship between core position and output voltage yields a sensor design that
shows excellent resolution, limited more by the associated circuitry than the sensing
method.
The internal core of the LVDT is generally constructed of an annealed nickel iron alloy with
the high-temperature limitations of the device limited to the curie point of the core and the
winding insulations used.
The thermal response characteristics of the LVDT are excellent for static and quasi-static
thermal environments due to the physical and electrical symmetry of these devices. The
physical symmetry also contributes to excellent zero repeatability over time and
temperature. Most thermal-sensitivity shift errors result from the significant thermal
coefficient of resistance (TCR) of the copper transformer windings. With increasing
temperature, the primary coil resistance will increase causing a decrease of the primary
current in the constant-voltage-excited case and therefore decreasing the magnetic flux
generated and voltage output correspondingly.
The use of constant-current excitation will ensure a constant primary flux regardless of the
coil resistance. Since the equivalent circuit of the constant-current source is a voltage
source with an infinite series resistance, the use of a low-TCR resistance, in series with the
primary, will function in much the same manner as the piezoresistive span-compensation
resistor by causing the primary voltage to increase as a function of temperature thus
offsetting the TCR-induced losses. The use of the series low-TCR resistor in the primary
circuit allows the constant-voltage source to appear to the LVDT as a constant-current
source.
Other thermally-active methods may also be used to compensate for the primary winding
TCR by causing the primary voltage to increase, with rising temperature, in proportion to
the increase in the primary coil resistance. The temperature coefficient of magnetic
permeability is another contributor to the thermal-sensitivity shift and is compensated out
as a net effect by the means described above. Within approximately 2 seconds of power
application the LVDT oscillator and demodulator circuitry will stabilize sufficiently for
dynamic measurement.
Due to self-heating of the primary coil, warm-up times for high precision static
measurement are comparable to strain gaged sensors and are dependent upon the thermal
stability of the measuring environment.
(This extract is taken from 'The Art of Practical & Precise Strain Based Measurement' by Jim
Pierson.
Important factors for the specification of Linear Position Sensors.
Determine the displacement
The length of displacement that needs to be measured will most likely determine the type or
range of sensors available (rod, slide or cable operated).
Consider the mounting of the sensor
Can the sensor be mounted close to the movement, integrated within the equipment, or will
it need to be situated away from the moving part?
Consider the aftachment method
The attachment between the sensor and the moving part can either be a fixed mechanical
interface or a spring biased probe that follows the moving surface.
Vibration conditions
Careful consideration needs to be given to the impact of vibration on the sensor, and
whether this can be detrimental to operation and life. This factor may determine the type of
sensing element to select - contacting or non-contact.
Shock conditions
High levels of shock can seriously affect the operation of a sensor, either permanently
damaging the device or degrading the output, so careful selection of a device that can
withstand this treatment is important.
Temperature variation or extremes
Extremes of temperature (hot or cold) need to be considered, and whether the sensor will
be required to operate within its specification at these extremes or just survive under
storage conditions. Some sensor technologies are particularly susceptible to changes in
temperature, resulting in drifting output signals, which could be mistaken by a control
system as a valid movement of a machine part.
Resistance to ingress of particles and liquids
Environmental protection of the sensor may be required where it is operating in harsh
conditions, to stop the ingress of harmful particles or liquids that may damage the sensor.
Protection to lP68 can be specified in some specialist designs, but IP66 is normally readily
available as an option on standard models.
Corrosion resistance
Protection from the effects of corrosive materials may be required. A sensor that has been
manufactured using corrosion-resistant materials (such as stainless steels or engineering
polymers) will be necessary in these applications.
Hazardous areas
If the application is in an area where explosive gases are present, then consideration must
be given to selecting a sensor that has been specially designed, tested and approved to be
safe to operate in this environment.
Sensor life
The duty cycle of the application being measured is important when selecting the type of
sensor to use. A typical benchmark for linear potentiometers is 200 million operations, but a
really heavy-duty cycle may be better suited to a sensor that uses technology operating on
a non-contacting principle, although this can have an impact on cost.
Accuracy
The accuracy of the sensor is determined by a combination of the output signal conformity
('linearity' or 'non-linearity') and the temperature coefficient of the sensor. Overall system
accuracy should be considered over the operating temperature range of the equipment.
Sensor resolution
The resolution of a sensor is the smallest measurable change in the output signal. Most
linear position sensors now use technologies that provide virtually infinite resolution; this is
normally stated in sensor manufacturers' technical data.
Repeatability
The ability of the sensor to provide repeatable signals is of paramount importance. Sensor
manufacturers will quote a figure for the deviation in indicated position when a point along a
stroke length is approached repeatedly from the same direction. This factor is often
confused with the sensor resolution.
Hysteresis
This is the difference in indicated position for the same point when reached from opposing
directions. This may be an important factor to consider but most linear position sensors
have minimal or negligible values.
Power supply available
An important factor to consider is the supply requirement to the sensor. Most operate on
values within the range of 5VDC to 3OVDC.
Output signal required
The output from the sensor can vary, but can be DCV, ACV, DCmA or a range of digital
signals (such as TTL, R5232 or CAN). The control interface to the sensor will usually
determine the type of signal required to be specified.
EMC/EMI
The ability of a sensor to withstand operation in electrically noisy environments has become
more important since the introduction of European regulations on EMC/EMI. CE marks
ensure testing and compliance with regulations.
Cost of ownership
A factor often overlooked when selecting a position sensor is the cost of ownership over a
period of time. Selecting a sensor on price alone may compromise the reliability of a
system, particularly if constant failure involves service costs, downtime and lost production.
Product availability
Sensors that are readily available from stock or manufactured within days of ordering can
provide a considerable advantage to project development times. Additionally, holding spare
parts to support after-sales is virtually eliminated.
Supplier experience
Do not underestimate the value of asking suppliers about their experience.