Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
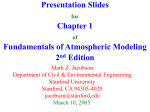
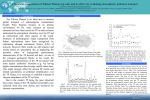
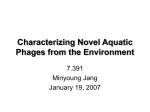
Remote Sensing of Environment 76 (2000) 239 ± 249 www.elsevier.com/locate/rse How precise are SeaWiFS ocean color estimates? Implications of digitization-noise errors Chuanmin Hu*, Kendall L. Carder, Frank E. Muller-Karger College of Marine Science, University of South Florida, 140 Seventh Avenue S., St. Petersburg, FL 33701, USA Received 26 June 2000; accepted 21 November 2000 Abstract Various subtle but important digitization round-off and noise errors are found in SeaWiFS imagery. These errors often cause large relative errors at a pixel and cause pixelization or ``speckling'' across the image, which is particularly obvious in the SeaWiFS chlorophyll standard product. Using simulations and current SeaWiFS algorithms, we show the effect of digitization-noise errors on the SeaWiFS ocean-color data products. It is found that the SeaWiFS mission goals, namely to estimate water-leaving radiances to within 5% and chlorophyll-a concentrations to within 35% for Case I waters, cannot always be met. For maritime aerosol conditions the errors in the estimated chlorophyll concentrations over oligotrophic waters can easily reach 60% and the absolute values over adjacent pixels can vary 2 ± 3 fold. Several schemes can be used to reduce this type of error, among which the spatial smoothing of the atmospheric-correction bands is recommended. This is because the errors in those bands are propagated and exaggerated to the visible bands and to the chlorophyll product through the atmospheric-correction process. The smoothing scheme, however, will cause more pixels to be discarded over cloud edges. Ultimately, a significant increase in both digitization bits and sensitivity is essential to achieve the stated mission goals. Such improved specifications are available on MODIS. D 2001 Elsevier Science Inc. All rights reserved. Keywords: SeaWiFS; MODIS; CZCS; Digitization ± noise; Ocean color; Water ± leaving radiance; Chlorophyll concentration; Atmospheric correction 1. Introduction Since the launch of the Sea-viewing Wide Field-of-view Sensor (SeaWiFS, Hooker, Esaias, Feldman, Gregg & McClain, 1992) in August 1997, global ocean color data are available in near-real time to the science community (McClain, Cleave, Feldman, Gregg, & Hooker, 1998). SeaWiFS is on a sun-synchronous satellite with a 2801km swath width, providing 2-day coverage of the global ocean with a nadir resolution of 1 km2 per pixel. It has 10-bit digitization for its eight spectral bands (Table 1). The two near-IR (NIR) bands, bands 7 (765 nm) and 8 (865 nm), are used for atmospheric correction. The visible bands are used for biooptical applications. Intensive vicarious and lunar calibration efforts have been conducted to help meet mission specifications (Barnes, Eplee, Patt, & McClain, 1999; McClain et al., 1998). A sophisticated * Corresponding author. Tel.: +1-727-553-1186; fax: +1-727-553-1103. E-mail address: [email protected] (C. Hu). atmospheric-correction scheme (Ding & Gordon, 1995; Gordon & Wang, 1994a) is applied in the data processing software package (SeaDAS) to remove atmospheric path radiance, which contributes 80 ±90% of the total signal in the visible bands. Consequently, the SeaWiFS mission goals, to estimate water-leaving radiances to within 5% and chlorophyll concentrations to within 35% for case I waters, are often met (McClain et al., 1998). However, since the SeaWiFS data are processed pixel by pixel, significant pixelization (or speckling) effects are often found in the data products (e.g., Hu, Carder, & MullerKarger, 2000). Although it has been shown that highaltitude aerosols, cirrus clouds, and digitization errors may cause speckling (Hu et al., 2000), the effect of digitization on the data products had not been quantified. In this paper, using simulations and the current atmospheric-correction and biooptical algorithms, the effects of digitization-noise errors on the data products are estimated. We begin by briefly reviewing the atmospheric-correction scheme (Gordon & Wang, 1994a). Then, we show how the digitization-noise errors, assumed randomly dis- 0034-4257/00/$ ± see front matter D 2001 Elsevier Science Inc. All rights reserved. PII: S 0 0 3 4 - 4 2 5 7 ( 0 0 ) 0 0 2 0 6 - 6 240 C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 Table 1 Radiance (L, mW cm ÿ 2 mm ÿ 1 sr ÿ 1) and reflectance (r, dimensionless) corresponding to 1 DN, and noise equivalent reflectance (NEDr) for the SeaWiFS bands (Gordon & Wang, 1994a; Hooker et al., 1992) Band l (nm) 1 DN in L 1 DN in r NEDr 1 2 3 4 5 6 7 8 402 ± 422 433 ± 453 480 ± 500 500 ± 520 545 ± 565 660 ± 680 745 ± 785 845 ± 885 0.0139 0.0136 0.0108 0.0093 0.0076 0.0042 0.0030 0.0022 0.00049 0.00045 0.00035 0.00031 0.00026 0.00017 0.00015 0.00014 0.00068 0.00043 0.00034 0.00031 0.00027 0.00023 0.00018 0.00015 tributed, affect the estimates of water-leaving radiance and chlorophyll concentration. Finally we discuss ways to reduce the errors. 2. Atmospheric correction of SeaWiFS The Gordon and Wang algorithm uses two NIR bands (bands 7 and 8, Table 1) to estimate the spectral aerosol reflectance. The ultimate goal of the atmospheric correction is to obtain the water-leaving reflectance, rw(l), from rt(l) measured by the sensor: rt l rr l ra l t lrw l; 1 where r = pL/( F0 cosq0), L is the upward radiance, F0 is the extraterrestrial solar irradiance, q0 is the solar zenith angle, and l is the wavelength of the band. rt is the total reflectance, rr is that due to Rayleigh scattering, and ra is that due to aerosol scattering and aerosol ± Rayleigh interactions. t is the diffuse transmittance from the target (pixel of the imagery) to the sensor (satellite). Ozone absorption effects are not considered in either of the terms on the right-hand side of Eq. (1), since rt has already been corrected for those effects by using near-real-time ozone data. For simplicity the sun glitter and whitecap effects are omitted since they can be either avoided by tilting the sensor or estimated from wind data (Gordon & Wang, 1994b). rr in the equation can be computed using an exact formulation to account for multiple scattering and polarization (polarization sensitivity of the SeaWiFS sensor is less than 2%, Hooker et al., 1992). Assuming rw = 0 at 765 and 865 nm, ra(765) and ra(865) can be derived. From precomputed aerosol lookup tables, ra(765) and ra(865) are used to determine the aerosol optical thickness at 865 nm (ta865) and the aerosol type (represented by 2 of the 12 candidate aerosol models with different contribution weights, see below). ra in other bands is then obtained by extrapolation according to the lookup tables. Following Gordon and Wang (1994a), ela,lb is defined as the ratio of the aerosol single-scattering reflectance, ras , between bands a and b (without subscripts, e = e765,865). ela,lb can be computed for a given aerosol type, which determines the single-scattering albedo and scattering phase function. Fig. 1a shows that using the spectral ela,lb, ras in one band can be extrapolated from ras in band 8. The conversion coefficients between ras and ra for all candidate aerosol models are precomputed using simulations and stored in aerosol lookup tables (computer files) for data processing. At a pixel of p r o c e s s i n g , ra ( 7 6 5 ) a n d ra ( 8 6 5 ) , d e r i v e d a s rt(765) ÿ rr(765) and rt(865) ÿ rr(865) (rw(765) 0 and rw(865) 0), are converted to ras(765) and ras(865) for each of the aerosol models. e = ras(765)/ras(865) for each model is then computed. The mean e will generally fall between those for two of the models with different contribution weights, a and (1 ÿ a) where 0 a 1 N i e )/N = ae1+(1 ÿ a)e2. N is and a is determined by ( i1 the total number of aerosols models. e1 and e2 are for the two selected models. This is because each aerosol model has its distinguishable e, as shown in Fig. 1b. The two aerosol models and a derived above are used to represent the aerosol type. ra in other bands is extrapolated using Fig. 1a and the conversion coefficients from the lookup tables (to convert ras to ra) for each of the two models, and then mixed using a and (1 ÿ a) in the same manner as for e. All other quantities associated with aerosols, such as ta865, are also derived using each of the two models and mixed in the same way (Gordon & Wang, 1994a). Fig. 1. ela,lb for the solar zenith angle q0 = 60° at scene center (the sensor zenith angle q = 22.7° and azimuth difference Df = 16.4°) for all the 12 candidate aerosol models currently used in the SeaWiFS atmospheric correction, namely, oceanic aerosol with relative humidity (RH) 90%, 99%, maritime aerosol with RH 50%, 70%, 90%, 99%, coastal aerosol with RH 50%, 90%, 99%, and tropospheric aerosol with RH 50%, 90%, 99% (see Gordon & Wang, 1994a). (a) Spectral ela,lb; (b) e (i.e., e765,865) for the 12 aerosol models. C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 241 Knowing the aerosol type and ta865, ta(l) and t(l) can be derived (Gordon et al., 1983; Gordon & Wang, 1994a). Finally, rw (reflectance equivalent of water-leaving radiance) is computed as (rt ÿ rr ÿ ra)/t. Simulations (Ding & Gordon, 1995; Gordon & Wang, 1994a) show that under most circumstances, rw(443) can be estimated to within 0.001, corresponding to 5% error for clear, Case I waters. 3. Digitization round-off and noise The above scheme assumes an error-free rt(l). Although conceptually this can be achieved by providing for an errorfree calibration, digitization round-off and noise errors are inevitable in any satellite data stream, which will produce errors in rt(l), and eventually in rw(l). The data downlinked from the satellite are quantized with the smallest incremental value presented as 1 digital number (DN). For SeaWiFS, data are digitized at the 10-bit level. For oceanographic applications with small radiometric signals, high gain settings are used. Table 1 lists the radiance (L, mW cm ÿ 2 mm ÿ 1 sr ÿ 1) corresponding to 1 DN for each SeaWiFS band (Gordon & Wang, 1994a; Hooker et al., 1992). Also listed in the table are the corresponding reflectance, r, for a solar zenith angle q0 = 60° and the noise equivalent reflectance (NEDr, Gordon & Wang, 1994a). If the digitized signal from the sensor reads Ltd, the analog signal, Lta, can be written as Lta = Ltd ÿ DL where DL is the digitization round-off or truncation error. In the final Fig. 3. Effects of digitization-noise on the SeaWiFS data collected on 9 February 1999 over the Sargasso Sea. (a) rt(412) jumps between odd and even scan lines for an area of 28 14 pixels; (d) data products are clustered for the same area. radiometric calibration, the gain and offset coefficients are adjusted statistically using multiple-pixel averages. Therefore DL can be regarded to be randomly distributed from ÿ 0.5 to 0.5 DN. Lta contains noise, DN, which can be assumed ``white,'' also ranging roughly from ÿ 0.5 to 0.5 DN (see NEDr in Table 1) for the same calibration reason. Therefore we will have the ``true'' signal, Lt, as Lt Ldt ÿ DL ÿ DN : Fig. 2. Effects of digitization-noise on the SeaWiFS data collected on 24 December 1999 over the Gulf of Mexico. (a) Digitized total radiance (in DN) in bands 7 and 8 along a scan line segment; (b) two aerosol models and the corresponding weight distribution between them determined by the SeaWiFS atmospheric-correction algorithm. 2 Since DL and DN are randomly distributed from ÿ 0.5 to 0.5 DN, Ltd can differ from Lt by up to 1 DN. Fig. 2a displays the total digitized radiance (in DN) in bands 7 and 8 along a scan-line segment. The difference in the geometry of the pixels (solar and viewing angles) is too small to effect a difference in the total radiance, and band 7 does not covary with band 8. Therefore, the variations in the DN values are not likely due to geophysical phenomena but rather an expression of digitization round-off and readout noise errors. As a result, the two aerosol models and the weight distribution between them determined by the two bands with the SeaWiFS atmospheric correction also change along the scan-line segment, as shown in Fig. 2b. Similar errors can be found across alternating scan lines as well. Fig. 3a shows that rt(412) jumps between odd and even scan lines over the Sargasso Sea. The values in Fig. 3a are the averages over 28 pixels along each scan line to increase the signal-to-noise to observe the underlying pattern. The cause of the error is unclear at this time, but is possibly due in part to reflectance differences between the sides of the double-sided scanning mirror of the SeaWiFS sensor. Fig. 3b illustrates more evidence of digitization effects resulting in data products that are ``clustered.'' 242 C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 These digitization-noise errors will have at least two related impacts on the standard SeaWiFS data products: (1) speckling across a scene that affects the visual quality; and (2) errors that affect quantitative retrievals at any individual pixel. We will use simulations to estimate the effect of propagation of these errors into the standard SeaWiFS level-2 products. elb,l8 = eb where e = elb,l8 and b = (l8 ÿ lb)/(l8 ÿ l7). Thus, we have ra(lb) = ra(l8)elb,l8 = ra(l8)[ra(l7)/ra(l8)]b. Similarly, rad(lb) can be derived as rad(lb) = rad(l8)[rad(l7)/ rad(l8)]b. Combining Eqs. (4) and (5a and b) and using a Taylor expansion to first-order approximation (i.e., products of any two small quantities, such as Drt(l7)Drt(l8), are omitted), we will have D trw lb Drt lb ra lb ÿ rda lb Drt lb b ÿ 1elb ;l8 Drt l8 ÿ bDrt l7 elb ;l8 =e 4. Method Assuming a random distribution from ÿ 0.5 to 0.5 DN each for DL and DN in Eq. (2), from Eq. (1) we have (Eqs. 3a ±c) rdt rr rda t d rdw ; 3a rt rr ra trw ; 3b rt rdt ÿ DrL ÿ DrN rdt ÿ Drt ; 3c where the superscript ``d'' stands for the data derived from the digitized satellite signal, and the quantities without the superscript are for the ``true'' signal, i.e., signal with no digitization round-off or noise errors. DrL and DrN are the reflectance counterparts for DL and DN, respectively. For simplicity they can be expressed in one term, Drt. The wavelength dependency of each term is suppressed in this notation. Since rr is purely a computed quantity, it remains the same in Eq. (3a) and (b). Therefore we have D trw t d rdw ÿ trw Drt ra ÿ rda : 6 4 Drt lb b ÿ 1eb Drt l8 ÿ bebÿ1 Drt l7 ; where the first term on the right-hand side represents the digitization-noise error at lb, and the terms in the bracket represent the errors caused by the digitization-noise errors in bands 7 and 8 propagated to lb through the atmospheric correction. For a given aerosol type, e is fixed at a certain solar and viewing geometry as indicated by Fig. 1b, but will change as digitization-noise errors occur, as implied by the definition edlb,l8 = rad(lb)/rad(l8). From Eq. (6), D(trw)(lb) can be estimated assuming DrL and DrN in Drt each varies randomly from ÿ r0.5 DN to r0.5 DN. Using e values provided by the aerosol lookup tables of SeaDAS (Gordon & Wang, 1994a), frequency distribution curves (FDCs) of D(trw)(lb) in several bands for maritime aerosols (model #5 of the lookup tables) at scene center (solar zenith angle q0 = 60°, sensor zenith angle q = 22.7°, azimuth difference Df = 16.4°) and for tropospheric aerosols (model #10 of the lookup tables) at scene edge (q0 = 60°, q = 53.4°, Df = 66°) are provided in Fig. 4a and Eq. (4) holds true for all bands. It shows that the error in the estimated water reflectance term in a certain band, D(trw), comes from two sources: one is from the digitization round-off and readout noise error in this band, Drt, and the other is from the errors in the aerosol reflectance estimates, (ra ÿ rad), which can be estimated using bands 7 and 8. Since rw for bands 7 and 8 is assumed zero, for bands 7 and 8 Eq. (4) becomes (Eqs. 5a and b) ra l7 rda l7 ÿ Drt l7 ; 5a ra l8 rda l8 ÿ Drt l8 ; 5b where l7 (765 nm) and l8 (865 nm) are the wavelengths for bands 7 and 8, respectively. For a certain band at lb, rad(lb) can be estimated from rad(l7) and rad(l8), and ra(lb) can be estimated from ra(l7) and ra(l8) in the following ways. 4.1. Single-scattering approximation Assuming single scattering, i.e., ras ra , we have elb , l8 ra (lb )/ra (l8 ). Following Gordon and Wang (1994a), for a certain aerosol type, to a good approximation elb,l8 can also be written as elb,l8 = exp[c(l8 ÿ lb)] where c is a constant independent of wavelength. Therefore we have Fig. 4. FDCs of the errors in the trw estimates caused by digitization-noise errors in the SeaWiFS bands. The single-scattering approximation was used and the aerosol type defined in the SeaWiFS lookup tables was used to yield e values free of digitization-noise errors. The actual e values vary with digitization-noise errors. (a) Maritime aerosol at scene center; (b) tropospheric aerosol at scene edge. C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 b, respectively. There are a total of 10 000 data points used in the simulations and the increments of the FDCs (horizontal axis of Fig. 4) are 0.00005. The figures show that even with an error-free calibration, the sensor and algorithm specifications (to estimate trw with uncertainties less than 5%, corresponding to 0.001 at 443 and 490 nm, and 0.0002 at 555 nm for oligotrophic waters) cannot always be met, especially at 555 nm. Indeed, Fig. 4b indicates that trw at 555 nm can vary as much as 0.0011 from its ``true'' value. For oligotrophic waters where the ``true'' value is 0.004 (Gordon & Wang, 1994a), the relative errors can be as much as 27%. However, since SeaWiFS uses a more sophisticated atmospheric-correction scheme than singlescattering approximations, the actual results are more complicated than shown here. 4.2. Multiple scattering (SeaWiFS) As mentioned earlier, ra(lb) can be derived by calling a routine of SeaDAS that uses ra(l7) and ra(l8) to determine the aerosol type and optical thickness. rad(lb) can be derived similarly with the routine, assuming random digitization-noise errors in rad(l7) and rad(l8). Here the ra terms represent the reflectance caused by aerosol multiple-scattering and aerosol± Rayleigh interactions. Unlike the singlescattering method which assumes a fixed aerosol type (e was allowed to vary with digitization-noise errors, though), the aerosol type (represented by two aerosol models with different weights) is determined from ra(l7) and ra(l8) and can vary with digitization-noise perturbations in bands 7 and 8. The results typically vary with aerosol type, aerosol optical thickness, and solar and viewing geometry, as shown below. 243 related to changes in the aerosol type selection, which can be explained by Fig. 1b. If the scheme chooses model #5 for error-free ra(l7) and ra(l8), a slight perturbation in bands 7 and 8 will make the scheme choose model #9 or #6 to result in a slightly smaller e, or choose model #4 to result in a slightly larger e (recall that the aerosol type is a mixture of two aerosol models with different weights). For example, for the 1-DN change in bands 7 and 8 shown in Fig. 2a, the two aerosol models and the weight between them also change (Fig. 2b). Thus, the errors can be much larger than using a fixed aerosol type. In contrast to model #5, model #10 has a distinguishable e from others (Fig. 1b), and small perturbations in bands 7 and 8 will less frequently cause the scheme to choose another model (model #11. Note the unsymmetrical FDCs caused by selection of model #11 for some of the negative errors). Therefore the errors in Fig. 5b are less than those in Fig. 5a. Unlike the singlescattering approximation where e varies with perturbations in bands 7 and 8, here e depends on the aerosol model only. Therefore, if the digitization-noise in bands 7 and 8 does not 5. Results and discussion For the same situations as in Fig. 4a and b (i.e., maritime aerosol at scene center and tropospheric aerosol at scene edge), assuming ta865 = 0.04 (compare: ta865 0.08 for typical North Atlantic atmosphere), FDCs of the errors in bands 2 (443 nm), 3 (490 nm), and 5 (555 nm) are presented in Fig. 5a and b. Statistics of the results for the former case (maritime aerosol at scene center) for the first five SeaWiFS bands (412, 443, 490, 510, and 555 nm) are listed in Table 2. Similar to Gordon and Wang (1994a), 5% of trw was assumed to be 0.001, 0.001, 0.001, 0.001, and 0.0002 for the five bands, respectively. Similar to the single-scattering results, the < 5% requirement cannot always be met, particularly for the 555-nm band. Compared with Fig. 4, the results are reversed, i.e., pixels with maritime aerosols tend to have larger errors than those with tropospheric aerosols. Since most of the time maritime aerosols prevail over the open ocean, large relative errors are inevitable at some pixels due to digitization-noise. The bimodal features in Fig. 5a are Fig. 5. Same as for Fig. 4, but the SeaWiFS atmospheric-correction scheme (Ding & Gordon, 1995; Gordon & Wang, 1994a) was used. The aerosol labels shown in (a) and (b) are those if derived with signals free of digitization-noise errors. The actual aerosol types may be different because the scheme derives the aerosol type according to the signals in bands 7 and 8, which contain digitization-noise errors. This is evidenced by the bimodal features in (a). In (c), the aerosol type was fixed regardless of the digitization-noise errors in bands 7 and 8. ta865 was assumed 0.04 in the simulations. 244 C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 Table 2 Statistics of D(trw) in the first five SeaWiFS bands caused by digitizationnoise errors Band Min Max Mean s < 5% (%) 1 2 3 4 5 ÿ 0.00173 ÿ 0.00156 ÿ 0.00130 ÿ 0.00112 ÿ 0.00097 0.00272 0.00237 0.00190 0.00169 0.00136 0.000108 0.000091 0.000061 0.000054 0.000030 0.00083 0.00075 0.00061 0.00056 0.00043 75.3 81.7 92.1 94.8 26.5 Maritime aerosol at scene center (ta865 = 0.04) was assumed and the standard atmospheric-correction scheme of SeaWiFS (Ding & Gordon, 1995; Gordon & Wang, 1994a) was used in the simulations. FDCs of bands 2, 3, and 5 are shown in Fig. 5a. change the aerosol type selection as for the positive errors in Fig. 5b, e will remain the same and the errors propagated to the visible bands will be smaller than those from the singlescattering approximations (compare: Fig. 5b vs. Fig. 4b). Indeed, if we use the same simulation as in Fig. 5a, but force the scheme to always choose model #5, the errors are much smaller, as shown in Fig. 5c. This perhaps explains why the speckling effects in the Coastal Zone Color Scanner (CZCS, Hovis et al., 1980) ocean-color products are not as severe as SeaWiFS Ð CZCS used a fixed maritime aerosol type to effect a vicarious calibration for automated global processing (Evans & Gordon, 1994). This also suggests one way to reduce the speckling errors in the data products, namely to use a fixed aerosol type. The errors in the water-reflectance estimates will propagate to other data products, such as chlorophyll concentrations (chl, mg/m3). These are estimated using the remote sensing reflectance, Rrs (1/sr), which to a good approximation can be related to rw as Rrs rw/(t0p), where t0 is the diffuse transmittance from the sun to the location (pixel) of interest (compare: t is from the pixel to the satellite sensor). Knowing the solar zenith angle, t0 can be derived similarly as done with t. Since the variations in both t0 and t are negligible with regard to perturbations in bands 7 and 8, the errors in Rrs can be estimated as DRrs D(trw)/(tt0p) where D(trw) is estimated using methods described above. Note that these errors are ``absolute,'' i.e., independent of the magnitude of Rrs. Therefore the relative errors will change with Rrs. Fig. 6. FDCs of chlorophyll estimates (mg/m3) obtained with the D(trw) distributions (Fig. 5a and Table 2) and the mean Rrs data associated with each chlorophyll concentration listed in Table 3. Statistics of these curves are listed in Table 4. To see how DRrs will affect the chl estimates, we pooled some pixels with various chl concentrations estimated with the OC2 algorithm (O'Reilly et al., 1998) from some SeaWiFS imagery (Sargasso Sea for low concentrations and Gulf of Mexico continental shelves for high concentrations), and averaged the spectral Rrs values associated with each chl concentration. Table 3 lists the mean spectral Rrs values together with the chl concentrations estimated with the OC2 algorithm. These values will be used as baseline or error-free values to compare with the chl concentrations estimated with Rrs + DRrs to determine the errors in chl estimates caused by the digitization-noise errors. FDCs of chl estimates resulting from the digitizationnoise errors for each chl concentration listed in Table 3 are presented in Fig. 6 for the case of maritime aerosols at the scene center. ta865 was assumed to be 0.04 in the simulations. To show the distributions effectively in one figure, the increments of the FDCs (horizontal axis) are adjusted for each concentration. For example, the curve with the lowest concentrations has increments of 0.002 mg/m3, and the curve with the highest concentrations has 0.1 mg/m3. The statistics of the results are listed in Table 4. The relative errors (variances) are generally larger at very low and very high concentrations than those at moderate concentrations. This can be well explained by the Rrs values used in the analysis (Table 3). Since the magnitude of DRrs is absolute, the smaller the Rrs value, the larger the relative error. For Number of pixels pooled 58 3313 903 496 16 Table 4 Statistics of distribution of chlorophyll concentrations (mg/m3, Fig. 6) corresponding to the D(trw) errors in Fig. 5a and Table 2 at various chlorophyll concentrations (Table 3) Rrs(412) 103 (1/sr) Rrs(443) 103 (1/sr) Rrs(490) 103 (1/sr) Rrs(510) 103 (1/sr) Rrs(555) 103 (1/sr) chl (OC2, mg/m3) 11.418 10.104 6.818 4.212 1.427 0.051 8.207 7.850 5.569 3.444 1.492 0.100 3.895 4.045 4.473 3.822 2.510 0.520 2.870 2.976 3.433 3.253 2.602 1.002 1.100 1.233 2.056 2.289 2.640 3.460 chl Min Max Mean s < 35% (%) 0.051 0.100 0.520 1.002 3.460 0.018 0.055 0.434 0.852 2.262 0.091 0.153 0.594 1.240 5.978 0.051 0.101 0.519 0.999 3.491 0.013 0.017 0.025 0.057 0.586 84.2 97.1 100 100 97.3 Table 3 Mean remote sensing reflectance (Rrs) values pooled over the pixels with various chlorophyll concentrations from some SeaWiFS imagery Chlorophyll concentrations estimated with the mean Rrs values using the OC2 algorithm (O'Reilly et al., 1998) are also listed. The first column is regarded as the ``true'' values from the mean Rrs data listed in Table 3. FDCs of the data are shown in Fig. 6. C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 245 Table 5 Similar to Table 2 but ta865 was set to 0.25 instead of 0.04 in the simulations Band Min Max Mean s < 5% (%) 1 2 3 4 5 ÿ 0.00194 ÿ 0.00186 ÿ 0.00161 ÿ 0.00151 ÿ 0.00138 0.00335 0.00308 0.00256 0.00237 0.00184 0.000060 0.000041 ÿ 0.000015 ÿ 0.000030 ÿ 0.000062 0.00113 0.00105 0.00090 0.00085 0.00070 69.3 69.6 71.7 72.9 27.3 FDCs of bands 2, 3, and 5 are shown in Fig. 8a. Fig. 7. Pixelization observed for adjacent data points from the simulations. Twenty data points from Figs. 5a and 6 are displayed along a line. example, mean Rrs555 = 0.001427 sr ÿ 1 at chl = 0.051 mg/ m3, and mean Rrs490 = 0.002056 sr ÿ 1 at chl = 3.46 mg/m3. Therefore, small DRrs will cause larger relative errors in the chl estimates since chl is a function of the Rrs ratio between these two bands in the OC2 algorithm. Results in Fig. 6 for high pigment concentrations can generally not be applied globally. Typically, at chl>3 mg/m3 the water is likely to be Case II, particularly in coastal environments. The baseline Rrs values used in our simulations are the mean values averaged over many pixels (Table 3). The actual Rrs spectra can be different than listed in Table 3. In Gelbstoff-dominated Case II waters, with high absorption in the blue, relative Rrs errors can be larger in the blue, causing higher variations in the data products than shown in Fig. 6 and Table 4. For the same reason, in suspended- sediment dominated Case II waters, due to the high backscattering, relative Rrs errors are smaller. Therefore, the variations in the data products can be smaller. However, for low-chlorophyll waters (e.g., the Sargasso Sea), since Rrs in band 5 (555 nm) is constantly low ( 0.0015), high variations from pixel to pixel are inevitable. Indeed, if we choose 20 data points from the simulation results and display D(trw) in band 5 and chlorophyll estimates for the low concentrations along a line, Fig. 7 can be obtained. Chlorophyll varies two- to threefold from 0.023 to 0.08 mg/ m3 around the true value of 0.05 mg/m3, and severe speckling features are apparent. For this type of water rw 0.004 in band 5 (Gordon & Wang, 1994a), resulting in relative errors in rw that vary from ÿ 20% to 20%. The errors shown in Figs. 5 and 6 will generally vary with solar and viewing geometry, aerosol type, and aerosol optical thickness. We have performed similar simulations for various situations and found that the errors in trw generally (1) increase with increasing solar zenith angle and increasing aerosol optical thickness; (2) are larger for spectrally flat aerosol types (i.e., e 1 as for aerosol models #5 and #6) than for other aerosol types (e.g., aerosol model #10); and (3) depend weakly on the location within the scene. Aerosol types with e close to 1 are more sensitive to digitization-noise errors in bands 7 and 8, resulting in an erroneous aerosol type being chosen, extrapolating to larger errors in the visible bands (compare: Fig. 5a and b). Since ra in the visible is extrapolated from ra(865) (equivalent to ta865 for a given aerosol type) according to the spectral shape defined by e (Fig. 1a), digitization-noise for larger ta865 will likely yield larger errors in the ra estimates in the visible, thus larger errors in the data products. For example, if we set ta865 = 0.25 and perform the same simulations as for Figs. 5a and 6 where ta865 was assumed 0.04, larger Table 6 Similar to Table 4, but ta865 was set to 0.25 instead of 0.04 in the simulations Fig. 8. Similar to Figs. 5a and 6, but ta865 was set to 0.25 instead of 0.04 in the simulations. The bimodal features are due to the selection of two aerosol models by the atmospheric-correction scheme. Statistics of the data are listed in Tables 5 and 6 for (a) and (b), respectively. chl Min Max Mean s < 35% (%) 0.051 0.100 0.520 1.002 3.460 0.004 0.034 0.388 0.809 2.034 0.114 0.184 0.614 1.224 7.170 0.048 0.096 0.510 0.988 3.598 0.023 0.030 0.037 0.060 0.761 54.7 68.2 100 100 88.5 FDCs of the data are shown in Fig. 8b. 246 C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 Fig. 9. Similar to Figs. 5a and 6, but band 6 (670 nm) instead of band 7 was used in the simulations. ta865 was assumed to be 0.04. errors are obtained, as shown in Fig. 8 and Tables 5 and 6 for D(trw) and chl estimates. The above results show that the estimated ocean color data, either rw, Rrs, or chl, are correct only as statistical aggregates (e.g., the average values) given an error-free calibration. For any particular pixel, the errors can be larger than the specified mission goals (D(trw) < 5%, Dchl < 35%). This is particularly true at 555 nm for oligotrophic waters (chl < 0.25 mg/m3) and at 412 and 443 nm for highly productive waters and Gelbstoff-dominated Case II waters. Over adjacent pixels, the variations can reach 40% for rw and Rrs, and two- to threefold for chl (Fig. 7). The errors are mainly due to anomalies propagated into the atmospheric-correction scheme, which determines the aerosol type and optical thickness from pixel to pixel. However, even with an error-free atmospheric correction that chooses the same aerosol type regardless of the errors in bands 7 and 8, the relative errors in rw555 can still be larger than 5% for oligotrophic waters where rw555 0.004 (Gordon & Wang, 1994a). For turbid waters where rw412 is small, the relative errors in this band can also be larger than 5%. The errors in the visible bands tend to have the same sign because of the same aerosol extrapolation used in the atmospheric correction, therefore band-ratio algorithms may reduce the errors in the chl estimates. Thus, using a fixed aerosol type, the 35% requirement can typically be met assuming the correct aerosol type is used. The difficulty in this approach is that the aerosol type must be known a priori. Although in principle the aerosol type for an area can be pooled to select the one with the highest frequency of occurrence, and the data can then be reprocessed using this fixed aerosol type, in practice this is often difficult to achieve because of the reprocessing time involved. Hu et al. (2000) have shown that use of band 6 instead of band 7 in the atmospheric-correction procedure can reduce errors caused by perturbations of the total signal by either high-altitude aerosol, cirrus clouds, or even digitization errors. Indeed, if we use bands 6 and 8 in our simulations, the errors in trw and chl estimates are reduced significantly. For the case of maritime aerosols at scene center with ta865 = 0.04, results are shown in Fig. 9a and b for D(trw) and chl, respectively. The errors for all data products are much smaller than those using bands 7 and 8 in the atmospheric correction, and the FDCs are much tighter, indicating less pixelization or speckling. However, this scheme requires that rw in band 6 must be known a priori, which is often difficult even for moderate colored waters (chl>0.25 mg/m3) unless an iterative approach (e.g., Siegel, Wang, Maritorena, & Robinson, 2000) is implemented. Another way to reduce the pixelization effects is to smooth the data in bands 7 and 8 before use of the atmospheric correction. This will reduce the chance to select an incorrect aerosol type. For the case of maritime aerosols at scene center with ta865 = 0.04, results from a 3 3 smoothing of bands 7 and 8 data in the simulations are shown in Fig. 10a and b for D(trw) and chl, respectively. Compared Fig. 10. Similar to Figs. 5a and 6, but bands 7 and 8 data were smoothed by 3 3 before use in the atmospheric correction. ta865 was assumed to be 0.04. C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 with the curves in Figs. 5a and 6, the errors are significantly reduced. Indeed, chl distributions are all within the 35% limit. Except for band 5 where trw is small, more than 99% of the data points have relative trw errors within 5%. This procedure should be used with caution, though, since the aerosol type and thickness may change quickly around atmospheric frontal zones, and a 3 3 smoothing will cause more data points to be discarded around cloud edges. The mean errors of the simulation results are not significantly different from zero for trw and chl, implying that if the data products are averaged or ``binned,'' either spatially or temporally (e.g., weekly mean), the results are not significantly biased at least for high-resolution data (e.g., 1 km2 per pixel). However, the implications from our simulation results are very important for data validation purposes Ð use of in situ data to validate the satellite estimates. For any pixel, the errors in the data products (rw or chl) can be much larger than the sensor specifications, making it necessary to average several surrounding pixels to reduce the error in comparison with the in situ data. For example, if we smooth the D(trw) data by 3 3, except for band 5 more than 99% of the data points have D(trw) within 5%. Chl estimated using the smoothed D(trw) data generally have errors < 35% (probability >99.9%). Similarly, the 3 3 smoothing can be used on the chl data products. However, this smoothing technique can generally not be used when inhomogeneous water surfaces are encountered, otherwise the features will be smeared. This is likely to occur in bloom or shelf waters. The SeaWiFS data processing has been updated several times since launch, as for both calibration and algorithm improvements (whitecaps estimates, biooptical algorithms, atmospheric-correction options, etc.). The updated software package (SeaDAS version 4, released in May 2000) has several options for atmospheric correction and biooptical algorithm, including an iterative approach to account for the nonzero water-leaving radiance (Lw) in the atmospheric correction bands in the NIR (Siegel et al., 2000), an atmospheric correction using bands 6 and 8 instead of bands 7 and 8, an atmospheric correction using fixed aerosol type, and an updated biooptical algorithm (OC4 version 4, O'Reilly et al., 2000). Although our simulations were based on an earlier version of SeaDAS (version 3.3) that assumed Lw(NIR) = 0 in the atmospheric correction and used OC2 algorithm for chlorophyll products, the new iterative approach and OC4 algorithm will unlikely alter the results shown here. For example, for a SeaWiFS scene collected on 15 September 2000 over the Sargasso Sea (20°N±36°N, 62°W ± 57°W) where the mean chlorophyll concentration was estimated as 0.07 mg/m3 and mean ta865 was estimated as 0.1, FDCs of the normalized water-leaving radiance (nLw, (rwF0)/(pt0), Gordon & Wang, 1994a) in band 5 (555 nm) estimated with the Lw(NIR) = 0 assumption and with the Lw(NIR) iteration are presented in Fig. 11. Note that for this type of water, nLw for the CZCS band at 550 nm is measured as 0.28 mW 247 Fig. 11. FDCs of normalized water-leaving radiance (nLw, mW cm ÿ 2 mm ÿ 1 sr ÿ 1) in band 5 (555 nm) of a Sargasso scene collected on 15 September 2000. The increments of the FDCs (horizontal axis) are 0.001. cm ÿ 2 mm ÿ 1 sr ÿ 1 (Gordon & Clark, 1981), and for the SeaWiFS band at 555 nm is measured as 0.26 mW cm ÿ 2 mm ÿ 1 sr ÿ 1 (McClain et al., 1998). The median and mode values from the two methods (Fig. 11) are close to these values. Except for a small horizontal shift, the results from the two methods are nearly identical. Of the 440,000 valid pixels (all suspicious pixels are discarded according to the quality control flags), only 20% of the pixels meet the 5% error requirement, which agrees with our simulations ( 27%, Table 2). Similarly, OC2 and OC4 algorithms yield nearly identical results for this scene. For turbid waters, although the iterative approach will improve the Lw estimates by taking account of the nonzero Lw(NIR), Fig. 11 implies that the approach is not sensitive enough to reduce the digitization-noise caused errors. For the same reason, OC4 will unlikely perform better than OC2 in terms of reducing this type of errors. The Moderate Resolution Imaging Spectroradiometer (MODIS, Salomonson et al., 1989) was launched in December 1999 and has been put in operational mode in spring 2000. It has more digitization bits (12 vs. 10 of SeaWiFS) and much higher radiometric sensitivity, which implies smaller D terms in Eq. (6). MODIS will use the same atmospheric-correction scheme as for SeaWiFS; therefore the speckling effects will hopefully be reduced. If the sensitivity is twice as high as that of SeaWiFS, the FDCs in the above figures will be at least twice as narrower, resulting in less pixelization or speckling. We plan to evaluate the pixelization effects of MODIS data in the near future. 6. Concluding remarks Through simulations we have shown that even with an error-free calibration, the SeaWiFS mission goal of estimating water reflectance to within 5% and chlorophyll con- 248 C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 centrations to within 35% cannot always be met for any individual pixel. A major portion of the error comes from the digitization-noise errors in the atmospheric-correction bands (bands 7 and 8), which will propagate to the data products through the atmospheric-correction process. This can be clearly explained by Eq. (6). Indeed, as a simplification of the sophisticated atmospheric-correction algorithm of SeaWiFS, the single-scattering approximations in Eq. (6) can be used conceptually to understand the errors in the data products caused by any perturbations in the total signal, by either digitization round-off, readout noise, or even calibration errors. Unlike calibration errors that provide incorrect, but constant calibration gains or offsets within the image, digitization-noise errors are randomly distributed and can result in errors in the final products with both signs. The traditional CZCS processing scheme applies one Angstrom exponent (related to aerosol type) derived from a clear-water area to the whole scene (Gordon et al., 1983). This scheme, as noted by many researchers, suffers from the variations of the Angstrom-exponent across the scene. For example, Andre and Morel (1991) concluded that ``Natural (or artificial) variations in the Angstrom exponent cannot be ignored and the use of a mean value for this exponent must be avoided as far as possible (over Case I waters). Therefore the pixel-by-pixel procedure, which does not require such averaging, is recommended.'' However, with the pixel-bypixel scheme, image pixelization caused by digitizationnoise errors has been shown inevitable, even with the improved digitization-bits and sensitivity on SeaWiFS. The simulation results show that for typical atmospheric conditions (maritime aerorols), at a particular pixel the errors in the data products can be as large as 35% and 65% for reflectances and chlorophyll concentrations for oligotrophic waters, respectively. Therefore the chlorophyll values for adjacent pixels can vary by 2 ±3 fold, causing pixelization or speckling. This suggests that when using in situ data to validate the satellite data products over homogenous water surfaces, surrounding pixels should be averaged to reduce the errors caused by readout noise and digitization round-off. The pixelization errors typically increase with increasing solar zenith angle and increasing aerosol optical thickness. They are larger for spectrally flat aerosol types (i.e., maritime aerosols) than for other aerosol types (e.g., tropospheric aerosols). Since most of the time maritime aerosols prevail over the open ocean, the pixelization errors are inevitable with the current SeaWiFS algorithms. The results shown here are for ideal conditions, i.e., error-free calibration, homogenous water surface and atmosphere, and no whitecap or sun glitter. An erroneous calibration will yield erroneous data products, but not pixelization because the error terms in Eq. (6) remain virtually unchanged from pixel to pixel. However, when inhomogeneous water surface or atmosphere is encountered as for bloom water, shelf water, waters with severe whitecaps, cirrus clouds in the atmosphere, or atmospheric frontal zones, the pixelization effects may get worse because of the patchiness nature under those circumstances. This is clearly evidenced in Fig. 11 where the relative standard deviation (0.1/0.28 36%) is much larger than that from the simulation ( 15%), and where the nLw values cover a wider range. There are several ways to reduce the digitization-noise caused errors. One approach requires some assumptions on either aerosol type or water-leaving radiance in band 6. The approach is available in the updated data processing software package (SeaDAS version 4). It is difficult, however, to know the aerosol type or water-leaving radiance in band 6 a priori, particularly for turbid waters. Therefore a 3 3 smoothing of bands 7 and 8 before atmospheric correction seems promising in reducing the errors to within the SeaWiFS mission goals. The scheme should be used with caution, though, over cloud edges. Since the errors are caused by digitization round-off and noise, the ultimate way to reduce the errors is the reduction of both of these, which will be available for MODIS. Acknowledgments This work was supported by NASA's Sensor Intercomparison and Merger for Biological and Interdisciplinary Oceanic Studies (SIMBIOS) investigation number NAS5-97128 to Frank Muller-Karger and NAS5-31716 to Kendall Carder. We thank the two anonymous reviewers for their comments and suggestions. We thank the SeaDAS development group (GSFC, NASA) for providing the codes. Doug Myhre assisted the management and processing of the SeaWiFS data at the USF HRPT station. SeaWiFS data are property of Orbimage Corporation, and their use here is in accordance with the SeaWiFS Research Data Use Terms and Conditions Agreement of the NASA SeaWiFS Project. References Andre, J.-M., & Morel, A. (1991). Atmospheric corrections and interpretation of marine radiances in CZCS imagery, revisited. Oceanologica Acta, 14, 3 ± 22. Barnes, R. A., Eplee, R. E. Jr., Patt, F. S., & McClain, C. R. (1999). Changes in the radiometric sensitivity of SeaWiFS determined from lunar and solar-based measurements. Applied Optics, 38, 4649 ± 4664. Ding, K., & Gordon, H. R. (1995). Analysis of the influence of O2 A-band absorption on atmospheric correction of ocean-color imagery. Applied Optics, 34, 2068 ± 2080. Evans, R. H., & Gordon, H. R. (1994). Coastal Zone Color Scanner system calibration: a retrospective examination. Journal of Geophysical Research, 99, 7293 ± 7307. Gordon, H. R., & Clark, D. K. (1981). Clear water radiances for atmospheric correction of coastal zone color scanner imagery. Applied Optics, 20, 4175 ± 4180. Gordon, H. R., Clark, D. K., Brown, J. W., Brown, O. B., Evans, R. H., & Broenkow, W. W. (1983). Phytoplankton pigment concentrations in the C. Hu et al. / Remote Sensing of Environment 76 (2000) 239±249 middle Atlantic bight: comparison between ship determination and Coastal Zone Color Scanner estimates. Applied Optics, 22, 20 ± 36. Gordon, H. R., & Wang, M. (1994a). Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with SeaWiFS: a preliminary algorithm. Applied Optics, 33, 443 ± 452. Gordon, H. R., & Wang, M. (1994b). Influence of oceanic whitecaps on atmospheric correction of SeaWiFS. Applied Optics, 33, 7754 ± 7763. Hooker, S. B., Esaias, W. E., Feldman, G. C., Gregg, W. W., & McClain, C. R. (1992). An overview of SeaWiFS and ocean color. In: S. B. Hooker, & E. R. Firestone (Eds.), NASA Technical Memorandum 104566, vol. 1. Greenbelt, Maryland: NASA Goddard Space Flight Center (25 pp., plus color plates). Hovis, W. A., Clark, D. K., Anderson, F., Austin, R. W., Wilson, W. H., Baker, E. T., Ball, D., Gordon, H. R., Mueller, J. L., Sayed, S. Y. E., Strum, B., Wrigley, R. C., & Yentsch, C. S. (1980). Nimbus 7 Coastal Zone Color Scanner: system description and initial imagery. Science, 210, 60 ± 63. Hu, C., Carder, K. L., & Muller-Karger, F. E. (2000). Atmospheric correction of SeaWiFS imagery: assessment of the use of alternative bands. Applied Optics, 39, 3573 ± 3581. McClain, C. R., Cleave, M. L., Feldman, G. C., Gregg, W. W., Hooker, S. B., 249 & Kuring, N. (1998). Science quality SeaWiFS data for global biosphere research. Sea Technology, 39, 10 ± 16. O'Reilly, J. E., Maritorena, S., Mitchell, B. G., Siegel, D. A., Carder, K. L., Garver, S. A., Kahru, M., & McClain, C. R. (1998). Ocean color chlorophyll algorithms for SeaWiFS. Journal of Geophysical Research, 103, 24937 ± 24953. O'Reilly, J. E., Maritorena, S., O'Brien, M. C., Siegel, D. A., Toole, D., Mitchell, B. G., Kahru, M., Chavez, F. P., Strutton, P., Cota, G. F., Hooker, S. B., McClain, C. R., Carder, K. L., Muller-Karger, F. E., Harding, L., Magnuson, A., Phinney, D., Moore, G. F., Aiken, J., Arrigo, K. R., Letelier, R., & Culver, M. (2000). Ocean color chlorophyll a algorithms for SeaWiFS, OC2 and OC4: version 4. In: S. B. Hooker, & E. R. Firestone (Eds.), SeaWiFS Postlaunch Technical Report Series, NASA Technical Memorandum 2000 ± 206892, Vol. 11. Greenbelt, Maryland: NASA Goddard Space Flight Center (51 pp.). Salomonson, V. V., Barnes, W. L., Maymon, P. W., Montgomery, H. E., & Ostrow, H. (1989). MODIS: advanced facility instrument for studies of the Earth as a system. IEEE Geosciences and Remote Sensing, 27, 145 ± 152. Siegel, D. A., Wang, M., Maritorena, S., & Robinson, W. (2000). Atmospheric correction of satellite ocean color imagery: the black pixel assumption. Applied Optics, 39, 3582 ± 3591.