Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
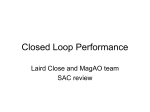
APPENDIX 4.8.B GSMT IMAGE QUALITY DEGRADATION DUE TO WIND LOAD Report prepared for the New Initiatives Office, December 2001. GSMT Image Quality Degradation due to Wind Load NIO-TNT-003 Issue 1.B 05-Dec-2001 George Angeli 1 GSMT Image Quality Degradation due to Wind Load : NIO-TNT-003 Issue 1 rev B by George Angeli This report summarizes the effects of the wind on the image quality. The wind load was calculated as follows: - wind velocity at secondary from Gemini South measurement c00030oo; - wind forces on secondary acting on tripod vertex; - wind forces on secondary due to secondary cylinder only; - wind pressures on primary simply patched from Gemini South measurement c00030oo. 2 Table of Contents 1. Model description ............................................................................................................. 4 Simulink model for wind load .......................................................................................... 5 2. Simulation results............................................................................................................. 6 3. Control considerations................................................................................................... 12 3 Chapter 1. Model description The structural model used in this simulation was extracted from the IDEAS FEA model of the point design and described in NIO-TNT-002 issue 1.B (GSMT Primary Mirror Deformation due to Wind Load). However, the output of the model was modified to generate an estimate of the optical quality of the telescope. Consequently, the role of the Output Block is to link the image quality of the telescope to the structural modes through the optical sensitivity matrix K. By multiplying this matrix with the modal coefficients, the model is able to estimate the image aberration expressed in Zernike terms. z = ∑ T k Wk F qm = K primary q m + K sec ondary q m = Kq m k Here z is the Zernike coefficient vector characterizing the wavefront aberrations (optical path differences); qm is the modal coefficient vector; F is the matrix of the eigenvalues; Wk is a weighting factor matrix for each surface representing the nodal participation of the given optical surface; while T k denotes the Zernike fit. The summation goes through all optical surfaces, in our case it’s for the primary and the secondary mirrors. Like for the mechanical displacements, the columns of Kprimary and Ksecondary as well as of K are the “optical mode shapes” of the system, respectively, meaning the optical responses to unit modal vectors. Actually, that’s the way these columns are calculated in the calc_Zernike.m script, using the results of the NIO internal report “Image Motion and Image Quality of the GSMT Optical System” (by Myung Cho, July 2001). To calculate the aberrations - expressed in Zernike coefficients - corresponding to the mirror rigid body motions, first we should determine the vector Xp and Xs containing the x, y and z translations as well as the x and y rotations of the primary and secondary mirrors. The x and y translations are the averages of the x and y displacements of the mirror support nodes. The z translation and the x, y rotations are determined as the first three Zernike coefficients of mirror deformation. For the secondary mirror, the fit is somewhat unusual, since it’s evaluated only on the circumference of the surface – that’s where the secondary support nodes are. Since the radius of the secondary mirror is 1 meter, no normalization is necessary. The fit is done by custom function zernike3.m The Zernike coefficients are expressed in OPD and measured in meter. 4 Simulink model for wind load [time,sec_forcex] -C- -C- From Workspace X Force Bvertex [time,sec_forcey] Y Force From Workspace1 Z Force Out Matrix Multiply x' = Ax+Bu y = Cx+Du kprimary Product GSMT Structure -C- Secondary Vertex ksecondary [time,sec_forcez] From Workspace2 Product2 Matrix Multiply Product1 -C- primary_OPD To Workspace3 zernike_OPD To Workspace1 secondary_OPD To Workspace2 [time,primaryforce_patched] Matrix Multiply From Workspace3 Product3 Bprimary Matrix Multiply 5 Chapter 2. Simulation results PSD calculation for Zernike expansion of OPD. The PSDs of the Zernike terms provide insight into the behavior of the telescope structure under significant wind load. The PSD is estimated with Welch's method using 50% overlapped Hamming windows of 256 samples. The function used is welch256.m listed in the Appendix. The following figures demonstrate the PSDs for the individual Zernike terms. Each figure has three curves showing separately the effects of secondary structure deformation, primary mirror deformation, and the total OPD due to wind load. The figures were created in Zernikegraph_OPD.m. 6 7 8 9 RMS calculations. As a sanity check we calculate the square root of the integral of Zernike PSDs and compare it to the RMS values determined from the time functions of the Zernikes terms. The calculation is done in zer_sanity_OPD.m. The values are in meter. Table 2-1. RMS values for Zernike terms Zernike RMS OPD RMS OPD RMS OPD RMS OPD RMS OPD RMS OPD terms primary from PSD secondary from PSD total from PSD #1 5.86 6.02 30.8 31.4 36.0 36.8 #2 29.0 28.9 26.7 26.5 11.1 11.0 #3 0.13 0.13 0.13 0.12 0.02 0.02 #4 0.01 0.01 0.01 0.01 0.01 0.01 #5 0.002 0.002 0.01 0.01 0.01 0.01 #6 0.15 0.15 0.58 0.59 0.47 0.48 #7 0.14 0.14 0.83 0.83 0.96 0.96 #8 0.003 0.003 0.003 0.003 0.005 0.005 10 Zernike Expansion (RMS) of the Image Aberration due to Wind Load -5 4 x 10 total due to secondary motion due to primary motion 3.5 RMS Zernike coefficient [m] 3 2.5 2 1.5 1 0.5 0 1 2 3 4 5 Zernike number 11 6 7 8 Chapter 3. Control considerations Control model description.Our objective with this highly simplified control model is to give a zero order estimate for the major parameters of the secondary rigid body motion control. Instead of a feedback loop, the required secondary position is determined by minimizing the aberration at each sampling point. In other words, the structure is bending on its own way, without actuator interaction, and the calculation gives a secondary mirror position relative to the bent position, which would be the "optimal" to minimize the RMS of the first 8 Zernike terms. The considered secondary motions are Tz, Rx and Ry. This approach obviously avoids two important aspects: (i) there is no interaction between the "correction" and the structural dynamics of the telescope, and (ii) there are no realization constrains on the "correction" meaning it has virtually infinite bandwidth and range. The temporal RMS of the "optimal" secondary mirror motions Tz, Rx and Ry are 0.39 µm, 1.41 arcsecond and 4.74 arcsecond, consecutively. The script doing the optimization is opt_secondary_tt.m. 12 13 Table 3-1. Temporal RMS values of Zernike terms (in µm) Zernike terms Before correction After correction #1 36.0 0.01 #2 11.1 0.01 #3 0.02 0.0003 #4 0.01 0.01 #5 0.01 0.01 #6 0.47 0.9 #7 0.96 0.98 #8 0.05 0.05 14