Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
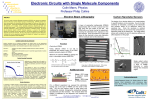
Document ref: 2004-R06 Rev. 1 – January 2005 Client: ESA-ESTEC Noordwijk, The Netherlands Project title: Development of Nematic Elastomer Nanocomposites Deliverable: Inputs For HTML Page Prepared by Silvio Campigli Eugene Terentjev Jordi Elvira Date 3 January 2005 3 January 2005 3 January 2005 Approved by Filippo Pagliai Date 4 January 2005 -1- Document ref: 2004-R06 Rev. 1 – January 2005 DESCRIPTION PROJECT OBJECTIVES Inflatable beams supports solar arrays, mirrors, sunshields and solar sails. Low mass, low storage volume and easy of deployment reduce cost considerably. Three main rigidization methods exist to extend the lifetime: forming a composite in space; inflating an luminium-kapton laminate structure beyond yield stress; using liquid foam instead of gas. To overcome bottlenecks of inflation and rigidization, a new concept of deployment is proposed. The approach is based on new two-ways shapememory materials based on nematic elastomers, with a stroke and stored energy far beyond existing records (strain 400%, recovery stress 1Mpa). However electricallydriven actuation is so far not possible. We propose to develop a composite material with enhanced dielectric anisotropy by embedding carbon nanotubes with high mechanical strength (Young modulus ~1Tpa), aligned along the uniaxial director of the monodomain nematic elastomer network and integrated in textile based membranes. The expected results of this study were to demonstrate the feasibility of electromechanically actuate the membrane. The new solution would enable predictable path of deployment and ensures that zones of exclusion around the spacecraft, such as areas populated by solar arrays or instruments, are not violated. As a fallback option, the same study looked at ordinary PDMS and semi-crystalline polymer nanocomposites, which may have only one-way actuation stroke but could still be very useful in deployable structure design. THE PARTNERSHIP To address the project objectives three entities with complementary technical background and market positioning have joined forces, respectively Grado Zero -2- Document ref: 2004-R06 Rev. 1 – January 2005 Espace (Italy) as developer, the Cavendish Laboratory of the Un. Cambridge (UK) as inventor and NTE (Spain) as the customer. MAJOR FINDINGS Scientists and engineers at Un. Cambridge have reviewed traditional approaches to dispersing nanofillers (carbon nanotubes and fibers) which subject the aggregates to high local shear, provided by a high-rpm mixer or ultrasound radiation, and then prevent re-aggregation by crosslinking the polymer matrix. In many cases a surfactant was involved to protect the highly polar nanotube surface. One of the tricks of the trade was to use the high-viscosity suspending liquid, i.e. a polymer solution or even a melt. The other aspect, that has emerged during this work, is the choice of filler particles. There are many very different sources of carbon nanotubes on the market today. After an extensive searching and testing of purity and reproducibility of samples, the preferred choice was the nanotubes provided by the Nanostructured & Amorphous Materials, Inc. (USA). The nanotube-polymer composites were fabricated by first carefully weighing the desired quantity of nanotubes and polymer. Calculations of weight percentage took into account the crosslinker, to be later used in the mixture. The quality of nanotube dispersion was monitored throughout the processing in two ways. Before crosslinking, aliquot samples of the mix were smeared into very thin films and examined with, at early stages, the optical microscope and later with a High-Resolution Scanning Electron Microscope (SEM) as aggregate sizes reduced well below optical resolution. After crosslinking, the samples were frozen and microtomed fractured to reveal internal surfaces such as the one shown on the coverpage. The second method was to monitor the viscosity of the mix during shearing – as tubes dispersed from rigid clusters there was a clear evolution of mean viscosity and -3- Document ref: 2004-R06 Rev. 1 – January 2005 the plateau saturation was taken as the criterion for final state reached. Un. Cambridge found that a shearing regime lasting 24 hours was suitable in removing nanotube aggregates due to the inherently high viscosity of the host polymer. However, nanotubes re-aggregated rapidly, even in a viscous polymer matrix, unless fast matrix crosslinking was made to prevent their subsequent movement. Wide angle X-ray diffraction was used as a method to assess the average tube orientation as a function of increasing applied uniaxial strain. An important characteristic of nanotube composite (where the tube surface is non-modified and remains conducting) is the overall conductivity of the material. In the case of nonaligned tubes, this identifies the percolation threshold of long flexible rods. In the case of increasing tube alignment in the stretched matrix, there is a possibility of conducting rods in contact (above percolation) to gradually lose this contact, at a fixed concentration. This is the way to increase the nanotube loading without crossing the concentration at which the composite becomes an electric conductor and lose its potential for reversible (equilibrium) electromechanical actuation. As the concentration is increased the rubbery network becomes stiffer and Young modulus (the response to static linear extension) generally increases. This is expected and in line with literature findings [Harris2004]. Another important and interesting subject of mechanical properties is the dynamical shear response, characterised by the frequency-dependent spectrum of complex modulus G*=G’+iG’’. The frequency dependence of the loss factor G'' reveals information about slow internal relaxation caused by nanotube motion; while the marked difference in magnitude of the storage modulus G' measured in different orientations of shear with respect to nanotube alignment axis makes analogies with deformation and soft elasticity of nematic rubbers [Warner2003]. At very low nanotube loading one might expect that large regions of rubbery network are still pristine. As a result, the transmission of stress from one side of the sample to -4- Document ref: 2004-R06 Rev. 1 – January 2005 the other can occur through `channels' with the original PDMS rubber modulus, making the total response only weakly affected by the sparse inclusions. At higher loading the concentration dependence becomes non-linear, reflecting the pair interactions between inclusions, etc. One is tempted to make a connection between the onset of this non-linear regime and the separately determined electric percolation threshold, when the whole nanocomposite becomes conducting through nanotube contacts. By design, our actuation materials stay in the linear loading regime, below percolation. The most important focus was the electro-mechanical response, or the actuation induced by applying voltage to the solvent free composite. The clear and repeatable response in contracting stress was evident. Indications are that the intensity of effect is in relation to nanotube alignment (similar findings were observed in response to IR radiation). The response was clearly significant, in the range of kPa. The on-cycle shows a fast rise in exerted stress (the dynamics has been studied separately, demonstrating possibility of slow/retarded and fast/inertial response in different configurations), then reaching a plateau level that depends on tube concentration and the field strength. There is no electromechanical response in elastomers without nanotubes, which confirms that the observed effect is a new action of nanotube composite. A relevant aspect to be considered during the development of Carbon Nanotube membrane actuators is the polymer film interaction with the textile membrane as the fabric properties has not to limit the deployment performances. Two configurations for the textile support structure have been investigated. A more traditional knitted structure and a 3D warp-knitted structure, consisting of three textile layers, which are simultaneously manufactured and joined together, resulting in a highly functional textile sandwich composed of a base layer and a cover face with a knitted fabric comprising vertical and diagonal spacer yarns arranged in-between. -5- A pictorial Document ref: 2004-R06 Rev. 1 – January 2005 representation of a candidate configuration of an uniaxial carbon nanotube membrane actuator is provided below. Although this preliminary work was used to validate the overall configuration from a qualitative point of view, there is evidence that a 3D warp-knitted structure is not significantly affecting the polymer film mechanical properties. -6-