Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
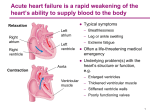
PUBLISHING HOUSE OF THE ROMANIAN ACADEMY PROCEEDINGS OF THE ROMANIAN ACADEMY, Series A, Volume 3, Number 1-2/2002. A GENETIC ALGORITHM FOR MODELING THE CONSTITUTIVE LAWS FOR THE LEFT VENTRICLE 1 1 Ligia MUNTEANU , Veturia CHIROIU , Marco SCALERANDI 1 2 2 Institute of Solid Mechanics, Romanian Academy INFM-Dipartimento di Fisica del Politecnico di Torino, Torino Corresponding author: [email protected] The central problem in modeling the dynamics of the heart is in identifying functional forms and parameters of the constitutive equations, which describe the material properties of the myocardium. The constitutive properties of myocardium are three-dimensional, anisotropic, nonlinear and timedependent. In this paper the active and passive constitutive laws for the left ventricle are determined from experimental data by using a genetic algorithm. Key words: myocardium, constitutive model, genetic algorithm 1. INTRODUCTION The dynamics of the left ventricle is the result of the contractile motion of the muscle cells in the left ventricular wall. Heart muscle is a mixture of muscle and collagen fibers, coronary vessels, coronary blood and the interstitial fluid. The fibers wind around the ventricle, and their orientation, relative to the circumferential direction, changes continuously from about 60 0 at the endocardium to –60 0 at the epicardium. This anisotropy influences the transmural distribution of wall stress. Recent models capture some important properties including: the nonlinear interactions between the responses to different loading patterns; the influence of the laminar myofiber sheet architecture; the effects of transverse stresses developed by the myocytes; and the relationship between collagen fiber architecture and mechanical properties in healing scar tissue after myocardial infarction (Bardinet, Cohen and Ayache [1,2], Huyghe., Van Campen, Arts and Heethaar [4,5], Van Campen, Huyghe, Bovendeerd and Arts [6]). A dificult problem in modeling the dynamics of the heart is in identifying functional forms and __________________________ Recommended by Radu P.VOINEA Member of the Romanian Academy parameters of the constitutive equations, which describe the material properties of the myocardium. We consider in this paper the cardiac tissue as a mixture of an incompressible solid and an incompressible fluid (Munteanu, Chiroiu C. and Chiroiu V. [3]). The active and passive constitutive laws for the left ventricle are determined from experimental data (Bardinet, Cohen and Ayache [1,2]) by using a genetic algorithm. 2. MATHEMATICAL MODEL The underformed heart, in a stress-free reference state, is modeled as a super ellipsoid surface S (Bardinet, Cohen and Ayache [1]) c2 2 2 2 c 1 c1 c2 c2 x y z 1 a a a 2 3 1 (2.1) where the constants ai , i 1,2,3 and ci , i 1,2 are c1 c 2 0.773 , a1 a 2 0.892 R , a3 R , with R 0.0619 m for a particular heart. For a sphere we have c1 c2 1 and a1 a 2 a3 R . The z axis corresponds to the z -axis of inertia of the Constitutive laws for left ventricle super ellipsoid model. The muscle fibres in the ventricular wall are assumed to be parallel to the endocardial and epicardial surfaces. The cardiac muscle is considered to be a mixture of two phases, a solid phase and a fluid phase. The equations of the beating left ventricle are composed from (Van Campen, Huyghe, Bovendeerd and Arts [6]): 1. The equilibrium equation of the deformed myocardicum (by neglecting the inertia forces) s p 0 (2.2) where s is the effective Cauchy stress in the solid representing the stress induced by the deformation in the absence of fluid and measured per unit bulk surface and p the intra-myocardial pressure representing the stress in the liquid component of the bi-phasic mixture. The total Cauchy stress tensor in the mixture is s pI , T . 2. Darcy’s law in Eulerian form: q Kp (2.3) J 1 1) 2 K 0 , the parameters K 0 Nb (permeability tensor of the underformed tissue) and N b ( averaged porosity of the underformed tissue) being specified. Here q is the Eulerian with K ( spatial fluid flow vector, K 0 the permeability tensor of the underformed tissue, F 1 u the deformation gradient tensor, J det F 0 the Jacobean of the deformation, and u the u1 u r displacement vector, u 2 u u u 3 z 3. Continuity equation (conservation of mass): u q 0 (2.4) C E (2.5) with: S Sa S p , S p Sc Ss C cc ( J 1) 2 , J det F 0 2 S ( E, t ) JF 1 s ( F 1 ) T , S S T (2.8) Here C is the isotropic energy function, E the Green-Lagrange strain tensor, and S ( E , t ) the effective second Piola-Kirchhoff stress tensor, split into an active stress S a ( E, t ) and a passive stress S p ( E, t ) . The passive stress tensor is split into a component resulting from elastic volume change of the myocardial tissue S c (E) , and a component resulting from viscoelastic shape S s ( E, t ) described in the form of quasi-linear viscoelasticity as: t S s d G(t ) dτ S e d (2.10) Se W E (2.11) with S e the anisotropic elastic response of the material, G (t ) a scalar function (reduced relaxation function) derived from a continuous relaxation spectrum (Huyghe., Van Campen, Arts and Heethaar [5]) and W the potential energy of deformation per unit volume. The form of the strain energy C (2.3) and W are chosen so that C and W are zero in the unstrained state and positive elsewhere, and S c (E) and S e are zero in the underformed state. The expression (2.3) satisfies those conditions. In this paper we consider for the strain energy function W the expression of the ion-core (BornMayer) repulsive energy (Delsanto, Provenzano and Uberall [7]: W 0.5 () exp[ () R]dV V V (2.12) where (( x)) is the repulsive energy function, (( x)) the repulsive range function and V is the heart volume, and : where dot means the material time derivative. 4. Pasive constitutive laws: Sc 3 (2.6) (2.7) R ( x x0 ) 2 ( y y0 ) 2 ( z z0 ) 2 with ( x0 , y 0 , z 0 ) an arbitrary point. We suppose that () and () depend on the angles angle helix trans in the form: () 1 ( helix ) 2 ( trans ) (2.13) 4 Ligia MUNTEANU, Veturia CHIROIU, Marco SCALERANDI () 1 ( helix ) 2 ( trans ) We mention that the values of the angles depend on the position x . Though the energy function (2.12) is referring to metallic bilayers and noble metals, we choose this form to be used in the description of the ventricle upon a closer analysis of the compatibility between the experimental data and analytical form for W . 5. Active constitutive laws (Van Campen, Huyghe, Bovendeerd and Arts [6] and Arts, Veenstra and Reneman [8]): T a T a0 A(t , l , v) (2.14) where T a is the first order Piola-Kirchhoff nonsymmetric active stress tensor, related to the second Piola-Kirchhoff active stress by S a F 1T a , and T a0 a constant associated with the load of maximum isometric stress. The stress tensor T a is convenient for some purposes; it is measured relative to the initial underformed configuration and can be determined experimentally. The cardiac muscle is striated across the fibre direction. The sarcomere length l (the distance between the striations) is used as a measure of fibre length. The experiments show that the active stress generated by cardiac muscle depends on time t , sarcomere length l and dl velocity of shortening of the sarcomeres v dt (Van Campen, Huyghe, Bovendeerd and Arts [6]). The active stress generated by the sarcomeres is directed parallel to the fibre orientation. The function A(t , l , v) represent the dependency on dl . We suppose that A(t , l , v) has the t, l and v dt form: A(t , l , v) f (t ) g (l )h(v) the ventricle) and a diastole (relaxation of the ventricle) phases. We have supposed that at the endocardial surface 1 a uniform intraventricular pressure p 0 is applied as an external load. The loads exerted by the papillary muscles and by the pericardium are neglected. The surface 3 represents the upper end of the annulus fibrosis and is a non-contracting surface with a circumferential fibre orientation. At 3 1 only radial displacement u1 is allowed (fig. 1). The set of equations (2.2)-(2.15) are completely determined if A(t , l , v) , () , () are known. The principal aim of this paper is to determine these functions from experimental data [1,2] by using a genetic algorithm. The set of controlling functions are noted by P: P { 1 ( helix ), 2 ( trans ), 1 ( helix ), 2 ( trans ), f (t ), g (l ), h(v)} (2.16) (2.15) The set of equations (2.2)-(2.15) represent four nonlinear coupled equations for the displacements u k ( x, t ) , k 1,2,3 and the intramyocardial pressure p( x, t ) . The boundary conditions are: p( x,0) p0 ( x) , x 1 , k 1,2,3 , t [0, T ] uk ( x,0) uk0 , x 1 , k 1,2,3 , t [0, T ] u k ( x,0) 0 , x 3 1 , k 2,3 , t [0, T ] where 1 is the epicardial surface, and [0, T ] the time interval during a cardiac cycle. The cardiac cycle is composed from a systole (contraction of Fig.1 Representations of surfaces 1 - endocardium, 2 - 3 2 - the portion where only radial displacement is allowed. A uniform pressure p 0 is applied on epicardium and 1 . Constitutive laws for left ventricle 3. A GENETIC ALGORITHM FOR EVALUATION THE CONTROLLING FUNCTIONS In the following we consider that the functions Pi i 1,2,...7 are approximated by polynomials of five degree, characterized by unknowns b j , j 1,2...42 . We extract the coefficients b j from the experimental data concerning the strain energy W (Demer and Yin [9]) and first Piola-Kirchhoff stress T a (Arts, Veenstra and Reneman [8]). For experimental measuring of W , a biaxial tissue testing is a valuable method. Biaxial tests generally involve excision of a thin rectangular slab of tissue parallel to the epicardial surface so that the muscle fibers lie within the plane of the tissue sample and the predominant fiber direction is aligned with one edge of the sample. The tissue is then placed in a biaxial testing apparatus that measures force and displacement (stress and strain) along the orthogonal fiber and cross-fiber axes (Demer and Yin [9]). The active stress T a is obtainable in experiments as a function of time, sarcomere length and velocity of shortening of the sarcomere (Arts, Veenstra and Reneman [8]) An objective function must be chosen that measures the agreement between theoretical and experimental data: ( P) K [W k k 1 Wkexp ]2 M [T a m Tma exp ]2 m 1 where Wk , k 1,2...K are the predicted representation of W calculated as functions of b at K points belonging to the volume between the inner and outer wall of the left ventricle. The quantities Wkexp , k 1,2...K are the experimental values of W measured at the same points. The functions Tma , m 1,2...M are M predicted representation of T a calculated as functions of b at different moments of time, sarcomere length and velocity of shortening of the sarcomere, and Tma exp the corresponding experimental values. The controlling parameters b j , j 1,2,...42 are determined by using a genetic algorithm (GA). GA assures an iteration scheme that guarantees a closer correspondence of predicted and 5 experimental values of W and T a at each iteration. We use a binary vector with 42 genes representing the real values of the parameters b j , j 1,2...42 . The length of the vector depends on the required precision, which in this case is six places after the decimal point. The domain of parameters b j [a j , a j ] , with length 2a j is divided into a least 15000 equal size ranges. That means that each parameter b j , j 1,2...42 is represented by a gene (string) of 22 bits ( 2 21 3000000 2 22 ). One individual consists of the row of 42 genes, that is, a binary vector with 22 42 components: b (1) (1) (1) ( 2) ( 2) ( 2) ( 42) ( 42) ( 42) 21 b20 ...b0 b21 b20 ...b0 ...b21 b20 ...b0 GA is linked to the problem that is to be solved through the fitness function, which measures how well an individual satisfies the real data. From one generation to the next GA usually decreases the objective function of the best model and the average fitness of the population. The starting population is usually randomly generated. Then, new descendant populations are iteratively created, with the goal of an overall objective function decrease from generation to generation. Each new generation is created from the current one by the main operations: selection, crossover and reproduction, mutation and fluctuation. By selection two individuals of the current population are randomly selected (parent 1 and parent 2) with a probability that is proportional to their fitness. This ensures that individuals with a good fitness have better chance to advance to the next generation. In the crossover and reproduction operation some crossover sites are chosen randomly and two individuals are reproduced by exchanging some genes between parents. In the new produced individuals, a randomly selected gene is changed with a random generated integer number by the mutation operation. In the fluctuation operation we exchange a discretized value of an unknown parameter in a random direction, by extending the search in the neighbourhood of a current solution. The fitness function is evaluated for each individual that corresponds to the gene representation. The alternation of generations stops when the convergence is detected. Otherwise, the process stops when a maximum 6 Ligia MUNTEANU, Veturia CHIROIU, Marco SCALERANDI number of generations are reached. The alternation of generations is stopped when convergence is detected. If no convergence the iteration process continues until the specified maximum number of generations is reached We can see clearly areas on the ventricle where the displacements are high (for example the area A). In conclusions, the stress T a is correctly predicted by the genetic algorithm, the results being qualitatively and quantitatively consistent with the results obtained by Bovendeerd, Arts, Huyghe, Van Campen and Reneman [10], and Van Campen, Huyghe, Bovendeerd and Arts [6]. The expression of the ion-core (Born-Mayer) repulsive energy (Delsanto, Provenzano and Uberall [7]) shows good agreement with the experimental data of biaxial experiments (Demer and Yin [9]). Further experiments are desirable to fully assess the applicability of this theory. Triaxial tissue testing is ideal, but it remains challenging in practice due to technical limitations in simultaneously loading myocardium in three orthogonal directions, ensuring the resulting strains and interpreting their significance. By separating the volume change from fiber extension modeled by the repulsive energy function, and shearing distortions modeled by the repulsive range function, the resulting set of response terms should provide an improved foundation for myocardial constitutive modeling. 4.RESULTS OF THE GENETIC ALGORITHM We report in this section the results of the genetic algorithm. Fig.2 shows the active material behavior as obtained by GA after 317 iterations. There are shown the time dependence of active stress for sarcomere lengths of 1.7, 1.9, 2.1 and 2.3 m , the length dependence of active stress, and the velocity dependence of active stress. Figs 3 and 4 show the dependence of () and () on angles helix trans given by GA after 222 iterations. The distribution of helix and trans from the endocardium to the epicardium it is also shown. Fig. 5 shows the initial pressure p 0 applied at the endocardial surface 1 . The visualization of the displacement field by different values according to the range 0-10 mm is shown in Fig. 6. Fig.2 Active material behavior as obtained by the genetic algorithm (time dependence of active stress for sarcomere lengths of 1.7, 1.9, 2.1 and 2.3 m , length dependence of active stress, and velocity dependence of active stress) Constitutive laws for left ventricle 7 Fig.4 Fig.3 1 ( helix ) and 1 ( helix ) as given by the genetic algorithm. Angle dependence of . Angle dependence of 2 ( trans ) and 2 ( trans ) as given by the genetic algorithm. 8 Ligia MUNTEANU, Veturia CHIROIU, Marco SCALERANDI REFERENCES 1. Fig. 5 Initial intraventricular pressure surface p0 applied at the endocardial 1 Fig. 6 Visualization of displacement field by different values according to the range 0-10 mm BARDINET E., COHEN L., AYACHE N., Fitting of isosurfaces using superquadrics and free-form deformations, In Proceedings IEEE Workshop on Biomedical Image Analysis (WBIA), Seattle, Washington, June 1994. 2. BARDINET, E., COHEN L.D., AYACHE N., Superquadrics and free-form deformations: a global model and track 3D medical data, in: Proceedings Conference on Computer Vision, Virtual Reality and Robotics in Medecine (CVRMed), Nice, France, April 1995. 3. MUNTEANU L., CHIROIU C., CHIROIU V., Nonlinear dynamics of the left ventricle, Physiological Measurement, vol.23, may 2002. 4. HUYGHE J. M., VAN CAMPEN D. H., ARTS T., HEETHAAR R. M., A two-phase finite element model of the diastolic left ventricle, J. Biomech., 24, no. 7, pp. 527-536, 1991. 5. HUYGHE J. M., VAN CAMPEN D. H., ARTS T., HEETHAAR R. M., The constitutive behavior of passive heart muscle tissue: a quasi-linear viscoelastic formulation, J. Biomech., 24, no. 9, pp. 841-849, 1991. 6. VAN CAMPEN D. H., HUYGHE J. M, BOVENDEERD P, H. M., ARTS T., Biomechanics of the heart muscle, Eur. J. Mech., A/Solids, 13, no. 4-suppl., pp. 19-41, 1994. 7. DELSANTO P. P., PROVENZANO V., UBERALL H., Coherency strain effects in metallic bilayers, J. Phys.: Condens. Matter, 4, 3915-3928, 1992. 8. ARTS T., VEENSTRA P. C., RENEMAN R. S., Epicardial deformation and left ventricular wall mechanics during ejection in the dog, Am. J. Physiol., 243, H379-H390, 1982. 9. DEMER LL, YIN F.C.P., Passive biaxial mechanical properties of isolated canine myocardium. J Physiol Lond,.339, 615-630, 1983. 10. BOVENDEERD P. H. M., ARTS T., HUYGHE J. M., VAN CAMPEN D. H., RENEMAN R. S., Dependence of local ventricular wall mechanics on myocardial fiber orientation. A model study, J. Biomech., 25, no.19, pp. 1129-1140, 1992. 11. HUYGHE J.M., VAN CAMPEN D.H., ARTS T., HEETHAAR R.M., The constitutive behavior of passive heart muscle tissue: a quasi-linear viscoelastic formulation. J Biomech.,24, pp. 841-849, 1991. Received March 13, 2002