Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Cinvestav,
Instituto Politécnico Nacional
Mexico City, Mexico
ENSIM, Mechanical Engineering School
University of Maine
Le Mans, France
DELAET Thomas
ENSIM Student
3rd Year
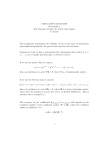
Stability plots of Mathieu’s Equation two dimensions.The red regions correspond to stable response.
Report submitted in partial fulfillment of the requirement to obtain:
Mechanical Engineering degree
specialized in Vibration and Acoustics
Stability limits determination for linear
parametrically excited systems
Elaborated at:
CINVESTAV, Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional,
Research and Advanced studies of National Polytechnic Institute
Supervised by:
Joaquín Collado
Summary:
The purpose of this report is to explain what I learned during my internship period
with the research lab at Cinvestav, Mexico D.F. in the department of Automatic Control.
The subject treats of parametric resonance, which actually a hot topic in science, with its
ability to modify vibration behavior. Most of case, the parametric resonance is treated as a
danger for system due to the lack of knowledge and control. But using correctly these
phenomenons can lead to complete new technologies of vibration amplitude control. This
report focus on how to obtain the Arnold’s tongues, the stability diagrams, of equations
with varying parameters.
Keywords: Control, Vibration, Mathematics
Résumé:
Le but de ce rapport est d’exposer ce que j’ai pu apprendre lors de ce six derniers
mois de stage au laboratoire de recherche de CINVESTAV, à Mexico City au département
de control automatique. Le sujet traite de la résonance paramétrique, qui en effet
actuellement un sujet très prisé par les centres de recherche, grâce à son influence sur le
comportement vibratoire des systèmes. Dans la plupart des cas, les résonances
paramétriques sont considérées comme un danger pour les différents systèmes.
Cependant en utilisant correctement ces phénomènes, ceci peut aboutir à de nouvelles
technologies de contrôle vibratoire. Ce rapport cible principalement sur l’obtention des
Arnold’s tongues, qui correspond au diagramme de stabilité des systèmes soumis à des
résonances paramétriques.
Mots Clés: Contrôle, Vibration, Mathématiques
Contents
Acknowledgements .............................................................................................................3
1.
Introduction .................................................................................................................1
2.
Definition and Stability limits for Hill and Mathieu’s equation .......................................3
3.
2.1.
Floquet Theorem ........................................................................................................... 3
2.2.
Stability for Hill’s equation ............................................................................................ 5
2.3.
Applications of Mathieu’s Equation .............................................................................. 6
Solving Meissner and Mathieu’s equations: ..................................................................7
3.1.
4.
Solving Mathieu equation one dimensional ............................................................... 10
3.1.a.
Finding Analytic solutions for Mathieu’s equation ............................................. 10
3.1.b.
Finding Numerical solution for Ordinary Differential equation .......................... 10
3.2.
Solving Mathieu equation multidimensional with/without combination: ................. 12
3.3.
Angular frequency variation and Beta variation ......................................................... 14
Improving Matlab code .............................................................................................. 16
4.1.
Optimizing Matlab code .............................................................................................. 18
4.1.a.
First acceleration: Array Pre-allocation ............................................................... 20
4.1.b.
Second acceleration: Local parallel computing ................................................... 20
4.1.c.
Third acceleration: Computing on Graphic cards using GPU .............................. 22
5.
Using Matlab to simulate a system 2 masses and 3 springs .......................................... 24
6.
Conclusion on parametric resonance .......................................................................... 27
6.1.
Appendix 1 : Matlab: Meissner's equation ................................................................. 29
6.2.
Appendix2: Matlab: Mathieu's Equation x''+(alpha+beta*cos(t))x = 0 ....................... 30
6.3.
Appendix 3: Finding Numerical solution for Ordinary Differential equation ............. 31
6.4.
Appendix 4 : Matlab: Mathieu's Equation 2 Dimensions .......................................... 33
6.5.
Appendix 5: Matlab Mathieu’s equation with Angular frequency variation .............. 34
6.6.
Appendix 6: Matlab Solving and plotting negative parameters.................................. 35
6.7.
Appendix 7: Simulink diagram to obtain mass displacements.................................... 36
6.8.
Appendix 8: Simulation User guide: ............................................................................ 37
6.9.
Appendix 9: Reprogramming ODE45 function for GPU .............................................. 37
6.10.
Appendix 10 Reprogramming Eig.m ........................................................................ 39
References: ....................................................................................................................... 40
Acknowledgements
Finally the time for a personal and a last word, hopefully as a Mechanical
Engineering student, has come. While I was studying at ENSIM, I often wished of this
moment when the final manuscript would be written symbol of the final step reached to
obtain the degree “Engineer”. I would look back at this period of my life with pleasure,
nostalgia and gratitude. This moment has come and I can see many wonderful people,
from inside and outside the work-sphere I met during all these years, at ENSIM, at South
Dakota State University, at Loughborough University and especially nowadays at
Cinvestav, all contributing to my present knowledge and experience in assorted ways. In
retrospect, this adventure has only been possible and even enjoyable thanks to my
friendly fellows. It is indeed a pleasure to convey my gratitude to them all in my humble
acknowledgement.
For this last internship, in Mexico, I would specially like to thank Dr Joaquín
Collado, for giving me the opportunity to complete my degree at his department. He has
always been there to provide me unflinching information, support and guidance in
different ways. I am impressed by his understanding in mathematics. I also have to
mention all PhD students and Master students, whom heartily welcome and guide me in
this new country. Thanks to them, I had the will to learn Spanish, to discover and know the
Mexican cultures, beyond the traditional ideas.
Thomas DELAET 2012
1. Introduction
The purpose of this report is to explain what I learned during my internship period
with the research lab at Cinvestav, Mexico D.F. in the department of Automatic Control.
This report is also a requirement for the partial fulfillment of ENSIM, Le Mans internship
program. The primary objective is focused on the theoretical analysis dealing with
parametric resonances and Mathieu’s equation, followed by programming the “Arnold’s
tongues” plot and an animation of a mechanical system (2 masses and 3 strings) on Matlab
software. The third part is dedicated to optimize the computing time of these programs.
To conclude, the final chapter deals with the following objectives in this material and in
Cinvestav, the current and future interests in industry.
My personal goal in this internship was to understand the parametric resonance
behavior, stability/instability response depending on the theoretical parameters of the
system. Then, as a final aim to use this knowledge in parametric oscillations to implement
or integrate this technology in a concrete situation like a new vibration absorbing
technology, or to control or limit the parametric oscillation in planes or boats.
To introduce parametric resonance, the question is to know why this material
nowadays is studied: In 1998, there was an incident with a post-Panamax C11 class
container ship, which was caught by a violent storm and experienced parametric roll with
roll angles close to 40◦. As a consequence, one third of the on-deck containers were lost
overboard and a similar amount was severely damaged. The indirect causes of this event
are due to the lack of knowledge on parametric roll and overall on parametric resonance,
in which the suspension point is periodically oscillating, turned it into a hot topic for
research. As an example of parametric resonance is the child swing. Typically, friction is
the major dissipative force causing the gradual decay of the motion. So, a child has to find,
to learn some pumping mechanisms in order to keep the swing running. Not only he can
keep the swing running but he can increase the oscillations, transferring the system from
stability to instability. Some pumping schemes can even start a swing from the rest
positions. Pumping means that the child transfers energy into the swing by performing
some movements at certain positions. A child can pump from a standing position by
periodically standing and squatting on the swing which results in periodic displacement of
the center of mass up and down, modeled by changing the length of the rod of the swing
with time. Another similar approach for parametric resonance is to study the effects of
vibrating support on the swing, symbolized in Physics, as showed below:
.
1
Figure 1: Pendulum with vibrating base, an example of Mathieu's equation application
In many engineering, physics, electrical and biological problems, oscillatory
behavior of the dynamic system with periodic excitation is of great interest. The most wellknown phenomenon is the forced oscillations, which appear when the dynamical system is
excited by a periodic input. If the frequency of this external excitation is close to the
natural frequency of the system, then the system will experience resonance (oscillations
with large amplitude). On the other hand, the similar but less known phenomenon is
parametric oscillation, instability phenomenon, the result of time-varying (harmonic for
Mathieu’s equation) parameters in the system. In this case, the system could experience
parametric resonance, and again the amplitude of the oscillations in the output of the
system will be large.
When studying parametric resonance in a dynamical system, quickly a familiar
equation will appear a special case of second order differential equation with a periodic
coefficient, called Mathieu’s equation. Although Mathieu functions have plenty of
applications, they are not commonly used and many books on “special functions” do not
report them at all. This is likely due to the complexity of the solutions of the Mathieu’s
equation. This is why, more than 100 years after its definition, still many papers are
written on specific technical aspects of Mathieu’s Functions and their computational
problems. The first chapter is devoted to present this equation, its solutions, the stability
and some mechanical applications.
2
2. Definition and Stability limits for Hill and Mathieu’s equation
[1] [7] [2]
In Mathematics, the parametric oscillations are usually associated with the
Mathieu’s equation, published since 1886. It was introduced by Mathieu when analyzing
the movement of membranes of elliptical shape. Since then, many physical and
astronomical problems have been reported as requiring these functions in their analysis.
The simplified form, second order ordinary differential equations of this equation is:
ẍ + (α + β cos(t))x = 0
(1)
Where (α,β) are parameters, t is time variation, x variable and 𝑥̈ is its second
derivative with respect to time. In physical problems studied by Mathieu and any other
practical problems, both parameters are real. This equation presents properties listed
below:
2.1.
Mathieu’s equation always has one odd and one even solution.
(Using Floquet’s theorem -explained below-) Mathieu’s equation (1) always has at
least one solution x(t) such that x(t+T)= σ x(t), where the constant σ , called the
periodicity factor, depends on the parameters α and β and may be real or complex.
Mathieu’s equation always has at least one solution of the form exp(μt) φ (t),
where the constant μ is called the Floquet’s exponent and φ (t) has period π .
Floquet Theorem [5] [3]
Floquet’s theory is a branch of the theory of ordinary differential equations, relating to
the class of solutions, of the form:
𝑥̇ (𝑡) = 𝐴(𝑡)𝑥(𝑡)
𝐴(𝑡 + 𝑇) = 𝐴(𝑡)
(2)
This equation is a first order differential equation, where A(t) a continuous T-periodic
n-by-n matrix function of time. The first reaction, compared to the Mathieu’s equation is to
notice the different order of differentiation. However, in the section “Solving Meissner
equation”, a solution will be quickly exposed to obtain Mathieu’s equation in a form of a first
order differential equation. The main idea of Floquet’s theory is to transform periodic systems
into a traditional linear system with constants, real coefficients. The solution of the equation
(2) is of the form:
𝑥(𝑡) = ∅(𝑡, 𝑡0 )𝑥(𝑡0 )
Where ∅(𝑡, 𝑡0 ) is called the “state transition matrix”, and has the following properties [1]:
∅(𝑡, 𝑡0 ) is invertible, for all t, 𝑡0 ∈ 𝑅
∅(𝑡, 𝑡) = 𝐼
3
𝜕∅(𝑡,𝑡0 )
𝜕𝑡
∅−1 (𝑡, 𝑡0 ) = ∅(𝑡0 , 𝑡)
For all 𝑡1 , 𝑡2 , 𝑡3 ∈ 𝑅; ∅(𝑡, 𝑡3 ) = ∅(𝑡1 , 𝑡2 )∅(𝑡2 , 𝑡3 )
= 𝐴(𝑡)∅(𝑡, 𝑡0 )
Define new coordinates Z(t) as: 𝑍(𝑡) = 𝑃(𝑡)𝑋(𝑡) with 𝑃(𝑡) = 𝑒 𝑅𝑡 ∅(0, 𝑡):
𝑍̇(𝑡) = 𝑃̇ (𝑡)𝑃−1 (𝑡)𝑍(𝑡) + 𝑃(𝑡)𝐴(𝑡)𝑃−1 (𝑡)𝑍(𝑡)
𝑍̇(𝑡) = [𝑅𝑒 𝑅𝑡 ∅(0, 𝑡) − 𝑒 𝑅𝑡 ∅(0, 𝑡)𝐴(𝑡)]∅(𝑡, 0)𝑒 −𝑅𝑡 𝑍(𝑡) + 𝑒 𝑅𝑡 ∅(0, 𝑡)𝐴(𝑡)∅(𝑡, 0)𝑒 −𝑅𝑡 𝑍(𝑡)
𝑍̇(𝑡) = 𝑅𝑍
This final equation means that the periodic coordinate change 𝑍(𝑡) = 𝑃(𝑡)𝑋(𝑡), produces a
linear time-invariant system. The above properties are valid for any time-varying A(t). At this
moment, a new matrix from the state transition matrix can be defined as the “monodromy
matrix”, M:
𝑀 = ∅(𝑡0 + 𝑇, 𝑡0 ) = 𝑒 𝑅𝑇
With B a matrix possibly complex. This monodromy matrix has the following property: 𝜎(𝑀) =
𝜎(𝑀1 ) where 𝑀1 = ∅(𝑡1 + 𝑇, 𝑡1 ) because M and M1 are similar, which means all eigenvalues
are identical as long as t2=t1+T, finally:
𝜎(𝑀) = {𝑒 𝜌1 𝑇 , 𝑒 𝜌2 𝑇 , … , 𝑒 𝜌𝑛 𝑇 }
∅(𝑡, 0) = 𝑃−1 (𝑡)𝑒 𝑅𝑡
𝑥(𝑡) = 𝑃−1 (𝑡)𝑒 𝑅𝑡 𝑥(𝑡0 )
There is a T-periodic matrix P(t) as: 𝑃(0) = 𝐼 and 𝑃(𝑡 + 𝑇) = 𝑃(𝑡), is a nxn periodic matrix
and R Є ℝ𝑛𝑥𝑛 is a constant matrix. Since P(t) is continuous and periodic matrix, it must be
bounded. 𝑥(𝑡0 ), initial and finite value for t=0. Thus the stability is depending on the
monodromy matrix (𝑒 𝑅𝑡 ), and more precisely on the eigenvalues of the matrix R. The
eigenvalues of this matrix are defined as the Floquet’s multipliers. The key to study the
stability is to apply this following theorem using these multipliers: If at least one of all
multipliers has a modulus greater than one, then the system is said “unstable”. Otherwise, if all
multipliers have modulus less than one, the system is “exponentially stable”.
Another way to find out the stability is to use the Floquet’s exponents (𝜇), related to the
multipliers. As a consequence of Floquet’s theory (5), the general solution of the Mathieu has
this form, where A and B are constants of integration, 𝜇 and φ (t) as described previously.
𝑢(𝑡) = 𝐴𝑒 𝜇𝑡 𝜑
(𝑡) + 𝐵𝑒 −𝜇𝑡 𝜑
(−𝑡)
4
In the case Re(𝜇) = 0 and Im(𝜇) is irrational, then the general solution is aperiodic and
stable (Stable solution)
In the same way, if Re(𝜇) ≠ 0 and Im(𝜇) is an integer, the general solution is said
unstable.
Since the value of 𝜇 depends on Mathieu’s parameters, it follows that the solution of
Mathieu’s equation is stable for certain values and therefore not stable for other parameters.
A common use to represent these stability/instability regions is to draw plot 2D graphical with
parameters as axis, the results are either scatter plot methods or boundary tracing methods,
which each presents advantages and disadvantages. In this report, only the scatter plot
method will be used having the advantage to be easier to program and to have less limits for
usage. Nevertheless, all results from both methods have been compared and successfully
declared as equal.
2.2.
Stability for Hill’s equation
In literature, the Mathieu’s equation can be presented on different forms and sometimes
named Hill’s equation, which is a more general form of an ordinary second differential
equation with varying parameters (not necessary periodic):
ẍ + (α + β p(t))x = 0
(3)
Mathieu’s equation is a particular case of this Hill’s equation (3) where p(t)=cos(t). The
solution of this equation (3) has similar properties as Mathieu’s equation. By using
Floquet’s theory, it follows that x(t) is an arbitrary solution of (3)
x(t + 2π) = σ x(t)
The absolute value of the periodicity factor σ gives us information on the stability of the
system:
|σ| > 1 , x(t) is unstable
|σ| < 1 , x(t) is stable
|σ| = 1 , x(t) is unstable but stable if σ is one dimension
5
2.3.
Applications of Mathieu’s Equation
The Mathieu equation appears in wide spectrum of application in physics: Elastic wave
equations with elliptical boundary conditions, motions of particles, inverted pendulum,
parametric oscillators, the motion of a quantum particle in a periodic potential, are just few
examples. We can also cite the stability of structural elements such as plates and shells, which
are used in aerospace and mechanical applications, the analysis of the dynamical behavior of
micro-electromechanical systems used in sensors and in data communication applications, the
study of parametric resonance in civil structures like bridges.
With my vibration specialization, a clever choice is a link–mass–spring mechanism, a dynamical
system covered by Mathieu’s equation. The block of mass m can move in the vertical direction,
all other equipment (spring, link) is assumed to be massless. The spring is unforced when the
mass m is at point D. The driving force for the mass in the vertical direction is 𝐹1 =
𝑦 𝑓0 𝑐𝑜𝑠(2𝜔𝑡) . Using Newton’s second law, it follows that the equation of motion of the
system in the vertical direction is
𝑑𝑦
𝑚 2 + 𝑘𝑦 = 𝐹1
𝑑𝑡
𝑑𝑦
𝑚 𝑑𝑡 2 + (𝑘 − 𝑓0 cos(2𝜔𝑡))𝑦 = 0
(4)
Introducing a new time variable τ=2ωt, the equation (4) turns out as a Mathieu’s equation
form:
𝑑𝑦
𝑘 𝑓0
+ ( − cos(𝜏))𝑦 = 0
2
𝑑𝑡
𝑚 𝑚
Figure 2: Mechanical system leading to Mathieu's equation
6
3. Solving Meissner and Mathieu’s equations:
When the sinusoidal parametric modulation is replaced by a square-wave function, the
new equation obtained is called Meissner’s equation, one of its form is:
𝑥̈ + (𝛼 + 𝛽𝑠𝑔𝑛(cos(𝑡)))𝑥 = 0, 𝑥 ∈ 𝑅
(5)
Where (𝛼, 𝛽) are non-negative parameters and 𝑠𝑔𝑛(cos(𝑡)) is a 2π-periodic piecewiseconstant function. Unlike the Mathieu’s equation, it is possible in this case to obtain simple
analytical solutions. First, the equation (5) can be divided in two different forms:
For 0 < 𝑡 < 𝜋,
For 𝜋 < 𝑡 < 2𝜋,
𝑥̈ + (𝛼 + 𝛽)𝑥 = 0
(6)
𝑥̈ + (𝛼 − 𝛽)𝑥 = 0
(7)
To solve these equations (6-7), the system should be transformed to the first order differential
equation, in order to apply Floquet’s Theory, as follows:
𝑑 𝑥
[ ]
𝑑𝑡 𝑥̇
𝐴(𝑡) = [
𝑥
= 𝐴(𝑡) [ ]
𝑥̇
(8)
0
1
]
−𝛼 − 𝛽𝑠𝑔𝑛(cos(𝑡)) 0
This system is autonomous in the intervals 0 < 𝑡 ≤ 𝜋, and 𝜋 < 𝑡 ≤ 2𝜋 and admits constant
coefficients over these two intervals. Finding solutions using Laplace transforms, gives us a
result for the Floquet Matrix 𝐹 = ∅(2𝜋, 0) = ∅(2𝜋, 𝜋)∅(𝜋, 0)
Laplace transform of equation (8):
[𝑠𝐼 − 𝐴]𝑥(𝑝) = 𝑥0
𝑥(𝑝) = [
𝑠
−𝑤 2
1 −1
] 𝑥0
𝑠
With 𝑤1 2 = 𝛼 + 𝛽 for 𝑡 ∈ [0, 𝜋], and afterwards 𝑤2 2 = 𝛼 − 𝛽 for 𝑡 ∈ [𝜋, 2𝜋].
𝑥(𝑝) =
𝑠2
1
𝑠
[
+ 𝑤2 𝑤2
−1
]𝑥
𝑠 0
In the 2D plan (𝛼; 𝛽) we can differentiate 3 different cases:
For 𝛼 > 𝛽 , we obtain 𝑥(𝑡) = [ 𝑐𝑜𝑠(𝑤𝑡)
𝑤𝑠𝑖𝑛(𝑤𝑡)
F = [ 𝑐𝑜𝑠(𝜋𝑤2 )
𝑤2 𝑠𝑖𝑛(𝜋𝑤2 )
−sin(𝑤𝑡)⁄
𝑤 ] 𝑥0
cos(𝑤𝑡)
−sin(𝜋𝑤2 )⁄
−sin(𝜋𝑤1 )⁄
𝑤2 ] [ 𝑐𝑜𝑠(𝜋𝑤1 )
𝑤1 ]
cos(𝜋𝑤2 )
𝑤1 𝑠𝑖𝑛(𝜋𝑤1 )
cos(𝜋𝑤1 )
7
For 𝛼 < 𝛽 and 𝑡 ∈ [𝜋, 2𝜋], we obtain 𝑥(𝑡) = [ 𝑐𝑜𝑠ℎ(𝑤𝑡)
𝑤𝑠𝑖𝑛ℎ(𝑤𝑡)
2
𝑤 <0
F = [ 𝑐𝑜𝑠ℎ(𝜋𝑤2 )
𝑤2 𝑠𝑖𝑛ℎ(𝜋𝑤2 )
sinh(𝜋𝑤2 )⁄
−sin(𝜋𝑤1 )⁄
𝑤2 ] [ 𝑐𝑜𝑠(𝜋𝑤1 )
𝑤1 ] ;
cosh(𝜋𝑤2 )
𝑤1 𝑠𝑖𝑛(𝜋𝑤1 )
cos(𝜋𝑤1 )
1
For 𝛼 = 𝛽 & 𝑡 ∈ [𝜋, 2𝜋], 𝑤 2 = 0 we obtain 𝑥(𝑡) = [
0
1
F=[
0
sinh(𝑤𝑡)⁄
𝑤 ] 𝑥0 due to
cosh(𝑤𝑡)
𝜋
]𝑥
1 0
𝜋 𝑐𝑜𝑠(𝜋𝑤1 ) −sin(𝜋𝑤1 )⁄𝑤1
];
][
1 𝑤 𝑠𝑖𝑛(𝜋𝑤 )
cos(𝜋𝑤1 )
1
1
Computing all matrices’ determinants, using this formula det(AB) = det(A) × det(B), we find
det(𝐹) = 1
According to Floquet’s theory, ρ1 ρ2 = 1 , where ρ1 and ρ2 are the multipliers and stability
parameters of the system, For a stable solution, both multipliers require to be complex
conjugate and lie on the unit circle |ρ1 | = |ρ2 | = 1. If the multipliers are real and different,
then at least one lies outside of the unit circle (instability). Stability is possible only if the
multipliers merge to 1 or -1 and become double. Therefore, the boundary between the
stability and instability domains in the parameter space (𝛼, 𝛽) is given by this condition:
|ρ1 + ρ2 | = |trace(F)| = 2
This condition takes the form:
𝑤
𝑤
For 𝛼 > 𝛽: |2𝑐𝑜𝑠𝜋𝑤1 𝑐𝑜𝑠𝜋𝑤2 − (𝑤1 + 𝑤2 ) 𝑠𝑖𝑛𝜋𝑤1 𝑠𝑖𝑛𝜋𝑤2 | = 2
2
1
𝑤
𝑤
For 𝛼 < 𝛽: |2𝑐𝑜𝑠𝜋𝑤1 𝑐𝑜𝑠ℎ𝜋𝑤2 − (𝑤1 + 𝑤2 ) 𝑠𝑖𝑛𝜋𝑤1 𝑠𝑖𝑛ℎ𝜋𝑤2 | = 2
2
1
For 𝛼 = 𝛽: |2𝑐𝑜𝑠𝜋𝑤1 − 𝜋𝑤1 𝑠𝑖𝑛𝜋𝑤1 | = 2
The Matlab code associated is available in Appendix 1
8
Results:
Coexistence
point
Figure 3: Stability plot of Meissner’s equation 1 dimension. The red regions corresponding to parameter values
for stable quasi-periodic oscillations, the blue regions are the unstable regions.
Comment on this first result:
On this first resulting figure (3), when can figure out the stability of the solution of
the system depending to the parameters. In this example the parameters are from 0 to 5
with a resolution of 0.015. Successfully, we obtain the special form of stable regions, called
“the Arnold’s tongues” which are visible in graphical. With this chart, the user can decide
which parameters of the system will lead to unstable oscillations and which parameters
will lead to stability and therefore adjust his practical experience from an unstable system
to a stable system. To notice the special point called coexistence point on the chart, where
the two unstable regions cross each other, at this point, all solutions of the ODE are
periodic regardless the initial conditions.
9
3.1.
Solving Mathieu equation one dimension ([17] [16] [9] [8])
𝑥̈ (𝑡) + (𝛼 + 𝛽 cos 𝑡)𝑥(𝑡) = 0
3.1.a.
(1)
Finding Analytic solutions for Mathieu’s equation
Unlike the Meissner’s equation (7), it is not possible in this case to obtain simple analytical
solutions of this equation. The solutions must be found numerically, in this paper, using
Matlab programs. However, before presenting the results and the program, the idea of
this numeric method on its origin must be explained:
First, to apply the Floquet’s theory, the equation must be simplified into a first degree
𝑥
equation. Readily done by replacing the variables by: 𝑦 = [ ] , thus we obtain ordinary
𝑥̇
differential equations first order of this form:
ẏ (t) = [
0
−(α + β cos t)
1
] y(t)
0
With & 𝛽 , the scalar parameters. The Floquet’s theory states that a fundamental matrix
of this system may be expressed as 𝑦(𝑡) = 𝑃(𝑡)𝑒 𝑅𝑡 𝑦0 (11) with P(t) periodic matrix, R is a
constant matrix related to the monodromy matrix . To satisfy this equation (11) at initial
time, the matrix P(t=0) is necessary equal to identity matrix. Therefore, the solution of this
system at the first period (t=T) obtained is: 𝑦(𝑇) = 𝑒 𝑅𝑇 𝑦0 . If we choose initial condition
equal also to unity, then the eigenvalues of the matrix solution (equal to eRt ) at t=T are the
Floquet’s exponents, related to the Floquet’s multipliers. These two sets of generally
complex characteristic numbers are interrelated. Nevertheless, either of them governs the
stability of the system (Floquet’s theory). The stability test use will be on the Floquet’s
exponents, system stable if and only if all modulus are lower or equal to 1.
To obtain the whole resulting graphical this equation is solve point-by-point for all
combinations of parameters. So this routine is repeated for all values of each parameter.
The results of stability investigations are generally and preferably presented in the form of
stability charts 2 dimensions reflecting stability dependence on the two system
parameters.
3.1.b.
Finding Numerical solution for Ordinary Differential equation
The sensitive part of this code is to find the solution of this differential equation to
obtain correct eigenvalues. Matlab proposes various tools for numerically solving. After
investigating on the different solutions, the solver chosen is ode45() with the options (AbsTol
and RelTol) fixed to 1e-5. A explanation and quick presentation of these solver is available in
Appendix 3
10
Results:
Figure 4 Stability plot of Mathieu’s Equation 1 Dimension. The red regions corresponding to parameter values
where there are stable periodic oscillations. The blue regions are the unstable regions.
Comments on these two first figures:
The resulting figure for Mathieu’s equation one dimension is similar but not equivalent
with the Meissner‘s equation. Thanks to this program, users can figure out the stability of
the solution of the system depending to the parameters. In this example the parameters
are from 0 to 3.5 with a sharp resolution of 0.005.
The points at which the “Arnold’s tongues” intersect the axis β=0 are called “critical
frequencies” and are given at
𝑘2
4
𝑘 ∈ ℕ+ for 2π-periodic Hill equations. The M-file
associated to this section is available in Appendix 2.
Example Application:
Figure 5 System 1 DOF with varying stiffness
𝑥̈ +
𝑘 𝑐𝑜𝑠(𝑡)
𝑥=0
𝑚
By analogy, A=0 and B= K/M
11
3.2.
Solving Mathieu equation multidimensional with/without
combination:
𝐴 𝐶1
𝐵 𝐶3
𝑥̈ (𝑡) + (𝛼 [ 1
]+𝛽[ 1
] cos(𝑡)) 𝑥(𝑡) = 0
𝐶2 𝐴2
𝐶4 𝐵2
In many practical cases, the Mathieu’s equation is emerging on a multidimensional case,
like the example and the animation presented further of a system 2 mass and 3 springs.
For this new equation, the idea is identical as illustrated before but the program is more
complex using matrices. The main difference is with the appearance of 2 new matrices in
the function (A,B) which are 2-by-2 matrices (for 2 dimensional case) and can incorporate
coupling values (C variables) or not. The initial condition matrice turned into a 4-by-4
matrice identity. For each couple parameters, the system must be solved four times
instead of two, yields to the calculus of eigenvalues of matrices 4-by-4 which considerably
increase the computing time.
The Matlab program “Solving Mathieu’s equation 2 degree of freedom case is available in
Appendix 4.
Results:
Figure 6 Stability diagram of Mathieu’s Equation 2 Dimensions with coupling. The red regions correspond to
parameter values where there are stable periodic oscillations. The blue regions are the unstable regions.
Comments on this section:
The first reaction is to figure out that the solutions are more complex than the two
previous cases of dimension one, presenting more Arnold’s tongues. The explanation of
the shape shows the presence of mixing regions. This system presents larger instability
regions than the previous cases. The explication can be that as soon as one dimension is
stated unstable, the complete system will be stated unstable, which is not the case if one
dimension turns from unstable to stable whereas the other dimension is still on unstable.
12
Actually, all unstable regions for the one dimension of the previous figure are still unstable
in this diagram. This figure (5) has been obtained using parameters A=[1 0; 0 2] and B=[1.4
-1;-1 2].
Example of application:
Figure 7 : System MDOF 2 Masses 3 springs
[
M1
0
K cos(t) + K 2
0
] {ẍ } + [ 1
M2
−K 2
(K1 cos(t) + K 2 )
⁄M
1
{ẍ } + [
−K 2
⁄M
1
−K 2
] {x} = 0
K 2 + K 3 cos(t)
−K 2
⁄M
2
] {x} = 0
K 2 + K 3 cos(t)
⁄M
2
by analogy with Mathieu’s equation:
𝐾2 𝑀2
⁄𝑀 𝑀
1 2
𝐴=[
−𝐾2 𝑀2
⁄𝑀 𝑀
1 2
𝐾1 𝑀2
⁄𝑀 𝑀
1 2
𝐵=[
0
𝐾2 𝑀1
⁄𝑀 𝑀
1 2
]
𝐾2 𝑀1
⁄𝑀 𝑀
1 2
−
0
𝐾3 𝑀1
⁄𝑀 𝑀
1 2
]
13
3.3.
Angular frequency variation and Beta variation
In this third part, the focus is different case for Mathieu’s equation with time depend
frequency. A new variable, angular frequency, is added to the equation. In order to keep two
variables, we now assume that the variable Alpha is fixed in time, as follows:
Ẍ + (α + βcos(ωt))X = 0
Let’s define a new variable τ,
𝜏 = 𝜔𝑡
𝑋̈ + (𝛼 + 𝛽𝑐𝑜𝑠(𝜏))𝑋 = 0
Derivating twice X lead us to :
dX dX dτ
dX
=
=ω
dt dτ dt
dt
d2 X
d2 X
2
=
ω
dt 2
dt 2
ω2 Ẍ + (α + βcos(τ))X = 0
β
Ẍ + (α⁄ω2 + ⁄ω2 cos(τ)) X = 0
(10)
This equation (10) is similar to Mathieu’s equation, on which we can apply the M-files
presented before. However, the code must adjusted to integrate the time depend
frequency and the new values for each parameter. This code is available in Appendix 5
Figure 8: Stability diagram of Mathieu’s Equation 1 Dimension with varying angular frequency (w)
14
Figure 9: Stability diagram of Mathieu’s Equation 1 Dimension related to Period time (1/w)
Comment: The figure 7 show that the stability regions turns to be larger as omega
increases, and equivalently, on the second figure the instability region turns to be larger as
the period (1/w) increases.
15
4. Improving Matlab code [11] [10]
The first programs for Mathieu’s equation give us correct and good results. However it
presents important disadvantages:
Limited plotting tool (only one run plot)
Limited parameters data (ℝ+)
Excessive computing time
Each point must be tackled to improve users’ possibilities and comfort:
The first program done for finding Arnold’s tongues was limited only for positive real
parameters, however in practical case this limit is not occurring, covering all real numbers.
To adequate more this program with reality and practical problems, the algorithm has
been considerably changed to present results also with negative parameters.
M-file available in Appendix 6
Results:
Figure 10 : Code for negative parameters
Comment: This new feature permits to figure out that the stability regions are symmetrical
according to the x-axis (alpha), meaning that the sign of B do not affect the stability of the
system, only A does.
Limits on plotting:
The interest of this part is to be able to observe in sync the stability charts for different
systems, in order to notice the evolution of the Arnold’s tongues for each modification.
16
The second consequence is to visualize the effects of multidimensional and coupling cases
compared to the simplest Mathieu’s equation of dimension one.
Results:
Figure 11: Stability diagram of Mathieu’s Equation 2 Dimensions
Figure 12: Stability diagram of three different Mathieu’s Equations with 2 Dimensions
Comment on this result: This figure 11 is a study similar at the “Solving Mathieu equation
multidimensional with/without combination” with A=[1 0;0 4] and B=[1 0;0 4], the result is
also similar at this section, however with the ability to plot different stability regions for
different system, we can now superimpose the stability regions for the 1 dimension A=1
17
B=1, A=4 B=4 and the combination on 2 dimensions. The results shows that the final
stability regions are the regions previously stable in the both cases. This diagram confirms
the idea announced previously.
4.1.
Optimizing Matlab code
The main problem of all these programs is the computing time. These durations are
variable and depend on various factors:
Dimension of the Mathieu’s equation
Type of results wished (Simple plotting, comparison, coupling)
Parameters bandwidth
Resolution
Range of
Parameters (α,β)
[0;3.2]
Resolution
Executing time
0.0025
19hrs 49min
[0;3.2]
0.01
1 hr 19min
[-1;3.5]
0.02
44 min 19s
[0;3.2]
0.02
23min 43s
Chart 1 Executing Time for two dimensional case without coupling
As Matlab programming language is parsed, code is interpreted in real time.
Languages like C++ and FORTRAN are faster because they compile directly into the
computer’s native language. The advantages of parsing in real time are greater robustness,
and easier debugging. The disadvantages are a significant loss in speed. Instead of writing
Mathieu’s equation program in computer’s native language (difficult challenge), Matlab
proposes help and functions to speed up codes. This section discusses the basic strategies
used to decrease the computing time. The main disadvantage to speed up a code is to
make the code more complex to read for novices, to modify and to correct in case of
errors, but through this chapter the numerical solving idea and the results will remain
identical of the previous chapters.
N.B: Matlab is releasing each year new versions more and more powerful, the following
procedures might be obsolete in the next few years.
To speed up a code, the first question to ask is: Where are the most consuming time
functions in my program? Matlab 5.0 and newer versions include a tool called the
“profiler” that helps to determine the final computing time and where the most important
consuming time functions are in a program.
After a run, the profiler generates an HTML report on the program and launches a browser
window with: the time computing, all functions used classed by duration. More
information can be obtained by clicking on the functions, to locate the most timeconsuming lines.
18
Results
Chart 2: Matlab's Profiler
Comments: The most important consuming time function are ode45(), which solve the
differential equation and the Mathieu2D, which builds the function. The ode45() is a builtin function so it should be already optimize in time. However, the options(AbsTol and
RelTol) in this function permit us to find solution faster but with a error more important. It
is user’s responsibility to choose between faster computing time and the error tolerance.
Concerning the Mathieu2D functions, the way to build the function (3 lines and combining
matrices) is not the fastest, this can be improved.
19
4.1.a.
First acceleration: Array Pre-allocation
A well-known aspect for speed up Matlab is the pre-allocation of arrays. Matlab’s
matrix variables have the ability to dynamically augment rows and columns, the matrix
data memory must reallocated with larger size. If a matrix is resized repeatedly like on a
“for” loop, this overhead becomes noticeable. To avoid this phenomenon, the
programmer must pre-allocate the matrix with the command zeros() with the right
number of rows and columns. In this report, the number of rows and column are
deductible with the parameter bandwidth and the resolution, like for example:
>> k1=zeros(X_end/resolution+1,X_end/resolution+1);
4.1.b.
Second acceleration: Local parallel computing
On the hardware side, nowadays microprocessors have generally two or four
computational cores, currently expending to even more. The last past years have also seen
fast-growing accesses to clusters and networks of machines. In order to stay on the top,
this numerical computing environment had to evolve from a simple matrix tool into a
mature technical computing environment that supports large-scale projects
To ensure this new feature, a new set of commands has been added to allow the user to
request to parallel execution or to control distributed memory. The Parallel Computing
Toolbox allows a user to run a job in parallel on a desktop machine, using up to 8
"workers" (additional copies of MATLAB) to assist the main copy. If the computer has
multiple processors, each worker can activate one core, and then the computation should
run faster. Executing Matlab in the regular way only engages one processor’s core using,
whereas, if the processor presents more cores, the computing time can be significantly
reduced.
Running in parallel requires three steps:
- Request a number local workers
- Execute the normal command to run the program. The client call workers for help
as needed
- Release the workers
Opening/Closing local workers is proceeded by using these functions:
>>matlabpool open local 4
>>matlabpool close
The word local means the workers are treating on the local machine with cores available
The value “4”, value optional, is the number of workers you are asking for. It can be up to
8 (12 for Matlab 2012) on a local machine. If no values are entered, Matlab uses the
maximum workers available on your computer.
Adding these two lines, the program should run identically as before, but faster. Output
will still appear in the command window in the same way, and the data will all be
20
available. What has happened is computations were treated by different cores in a way
but not visible for users. Before any change in the code, the first question is to know if the
whole program can be executed in parallel mode.
Running Parallel for-Loops (parfor):
Many applications in Matlab involve multiple segments of code, some are repetitive.
Generally, for-loops can solve these cases. The basic concept of a “parfor” loop in Matlab
is the same as the standard for-loop. Part of the parfor body is executed on the Matlab
client (where the parfor is executed) and part is solved in parallel on MATLAB workers.
Matlab workers execute iterations in no particular order, and independently of each other.
The ability to execute code in parallel, on one computer, can significantly improve
performance in the case of parameter sweep application with many iterations or long
iterations.
The only restriction on parallel loops is that no iteration is allowed to depend on any other
iteration. Easily we can figure out, that the main loop “for” in the code (alpha, beta or
omega variation) proceeds unrelated calculation. Each data point (alpha, beta or beta,
omega) presents the same independent calculation. In conclusion, Parallel computing and
more specially Parfor-loops suit perfectly the objective to speed up this code. The
disadvantage of this technique is with all workers activated, the CPU is working 100%,
instead of 50% in normal use for two cores), meaning that the computer would be barely
usable for other tasks.
During this internship, computations have been done on this computer CINVESTAV’s
personal computer: Intel Core 2 Duo CPU E7400 2.80GHz Win XP (2 Cores)
Experience Computer
1
CINVESTAV
personal
1
CINVESTAV
personal
2
CINVESTAV
personal
2
CINVESTAV
personal
Methods
Local Parallel
Computing
Normal
Local Parallel
Computing
Normal
Resolution Executing Time
0.002
9hrs 4min 20sec
0.002
15hrs 4min 58sec
0.02
9 min 05 sec
0.02
15min 40sec
Chart 3: Time comparison between Local computing 1 core versus 2 cores
21
The gain in time for a very sharp definition is important 6 hours (40% time gained). Since it
takes some time to set up the parallel execution and transfer data, we still won't see a
speedup if the job is too small. The experience for a rough definition the parallel
computing gained around 6 minutes (37.5% time gained).
4.1.c.
Third acceleration: Computing on Graphic cards using GPU
Originally designed to make computer games look pretty and improve
performances on computer-aided design, GPUs are massively parallel processors on
graphics cards (presenting over 400 cores), promising to revolutionize computing in few
years. Since 2010, Nvidia and Mathworks have collaborated to offer the GPU’s advantages
also for scientists and engineers through Matlab’s interface. The GPU becomes a coprocessor for the personal computer. Since 2011, Matlab proposes a new toolbox for GPU
calculation suited for a variety of areas such as data analysis, image and signal processing
applications including communications systems, computational finance, etc. The GPU
toolbox’s charm is to enable the programmer to perform computations on powerful GPU
using familiar MATLAB language and from MATLAB environment without the exigency to
master advanced technical language (as C or Fortran) or having to learn the intricacies of
GPU architectures.
Figure 13: Architectures differences between CPU and GPU
The “Alu” (Arithmetic Logic Unit) are the processing area optimized to handle
mathematical computations and logic comparisons. On this schema, the GPU’s
architecture presents 12 times more Alu tan the classic processor, which makes it powerful
for solving paralyzed calculus. Basically, the GPU can execute 800 times more calculus than
CPU but this number is very variable depending on CPU’s technology and cores.
GPU computations relies on three steps process: Send data to the GPU memory, Execute
code (the "kernel") to process, and receive the results to Matlab environment. In general,
22
transferring code should be designed to minimize steps to keep the overall speed of
calculations. CUDA (Compute Unified Device Architecture) calculations on GPU usually
start to overcome ordinary CPU calculations for large-sized problems, e.g., matrices of
sizes 1000 or so. It should be noted that this sort of computation is still in its infancy,
appearing a little raw, but developing rapidly. In our program, the matrices’ size depends
on various factors, however for a reasonable definition, Matlab has to deal with matrices
size of hundreds until thousands, beyond the limit of interest for using GPU.
There are two options for performing MATLAB calculations on the GPU:
You can transfer or create data on the GPU, and use the resulting GPUArray as
input to enhanced built-in functions that support them.
You can run your own MATLAB function file on a GPU.
The suitable option depends on whether the functions you require are able to support
GPUArray, and the performance impact of transferring data to/from the GPU.
Supported MATLAB Code:
The functions passed into “arrayfun” (to be calculate on GPU), can contain the following
built-in MATLAB functions and operators:
Unfortunately, Matlab does not provide all functions needed for solving Mathieu’s
system, and specially the most important functions: ode45.m to solve differential
equations and eig.m, to calculate the eigenvalues. The question is now would it be
valuable to reprogram these missing functions to gain computing time. With Cinvestav’s
investment on GPU and the promising future on GPU calculation, we share the common
interest to test and create a version able to run on GPU. The reprogramming ODE45.m and
eig.m function for GPU calculation are both available electronically or in Appendix 11 with
the corresponding code.
23
5. Using Matlab to simulate system 2 masses and 3 springs
(with two varying stiffness):
Figure 14: System 2 Masses 3 Springs
The purpose if this section is to make a complete test for a system presenting 2
masses and 3 springs, a basic and well used system. Solving the equations for a multi
degree of freedom system normally does not lead us to the Mathieu’s equation or Hill’s
equation due to the lack of variation of parameters. For a multi-degree of freedom system
unforced and un-damped system, where [M] and [K] are symmetric matrices we obtain
this equation from Newton’s second law:
[𝑀]{𝑥̈ } + [𝐾]{𝑥} = 0
For a system: 2 masses and 3 springs:
M
[ 1
0
0
K + K2
] {ẍ } + [ 1
−K 2
M2
−K 2
] {x} = 0
K2 + K3
In order to obtain Mathieu’s equation and so parametric resonance, we assume that 2
springs has stiffness under cosines variation (k1 and k3), we obtain:
[
M1
0
K cos(t) + K 2
0
] {ẍ } + [ 1
M2
−K 2
−K 2
] {x} = 0
K 2 + K 3 cos(t)
Multiplying by [M]-1, we successfully obtain a form of Mathieu’s equation with varying
parameters.
The first part of this animation/simulation is to obtain the mass displacements from this
equation related to time, with all parameters configurable. For this problem, a Simulink
diagram has been configured according to the equation. See Appendix 7. The second part
was to create all dynamic elements of the animation (masses with squares and springs
with plotting functions). Mathworks proposes on its website equivalent programs by the
Matlab’s community (Reference) to create these forms but needs to be slightly adapted to
the problem (number, position, dimension, dynamic position). The third part was
dedicated to the User’s interface. Matlab propose a very useful graphical interface called
“GUI”, which does not request to write any code about the interface. This interface has for
purpose to let the users choosing most of the parameters of the systems, and to adapt to
24
the maximum the simulation to their real problem. The interface generates two results.
The mass displacement related to time in live and the stability or not of their systems. A
User’s guide is available for users in Appendix 8.
Figure 15: Configuration for the simulation
In order to validate the results, tens simulations have been proceeded and
compared with the stability plots from the chapter 1. All samples had been chosen
differently: instability, stability, close borders, parameters. This verification procedure can
be easily redone at any time, by anyone as soon as the results are obtained from both
programs.
The software presents as the results the animation of the two blocks and springs in
space in direct time, the main interest is especially for novices using this software, to help
visualizing and understanding the behavior of this system. The second results represents
the displacements of the blocks related to time, this graphical is useful to figure out the
behavior of the system (symmetric displacement, anti-symmetric, instability). The third
result is the maximum amplitude data for the two masses blocks. However the stability
results must be taken carefully because this information is only reliable for the unstable
case. Actually, the simulation time is sometimes not long enough to determine with
certainty the stability of the system.
25
26
6. Conclusion on parametric resonance
Parametric resonance is a well-known resonant phenomenon, which determines
the instability of a system in response to small perturbation. In the light of this definition,
it tends to suggest that parametric resonance is a danger for any system. For the last 10
years, parametric roll resonance for ships or automotive industries has been in focus of
their scientific department. However, if we look at a completely different class of systems
it is possible to find applications, which actually the parametric resonance is used as an
advantage. In micro-electromechanical systems parametric resonance phenomena are
induced to, for example, reduce the parasitic signal in capacitive sensing [16], or to
increase robustness against parameter variations in micro-gyroscopes [18]. Analogous
interests in capitalizing the large energy released by parametric resonant oscillations to
boost specific system features are also developing in the field of wave energy exploitation.
The idea is to induce parametric resonance in order to increase the amount of energy
producible by the converter [20, 21]
Parametric resonance is nowadays a hot topic for research and should still be for
years. Thanks to my work and to the knowledge made available at CINVESTAV, I have been
able to find the instability tongues characteristics of Mathieu’s equation of different forms,
to master the optimization of Matlab code and to perform a complete animation of a
system 3 masses-2springs, which can be readily be adjusted to another system with
different dispositions or dimensions. My work permits to this team research to have
reliable tools to find the stability diagrams for different forms of equation (mono and multi
dimensions). My other contribution is with the Simulink diagram and the animation, which
make the parametric resonances more visible and giving information about the vibration
amplitude. The next direct goal would be to write a program to find combination of
parameters in order to control vibration amplitude or to minimize them, which is of great
interest for industries with goal to attenuate vibration.
27
Appendix
7.1.
Appendix 1 : Matlab: Meissner's equation ................................................................. 29
7.2.
Appendix 2: Matlab: Mathieu's Equation x''+(alpha+beta*cos(t))x = 0 ...................... 30
7.3.
Appendix 3: Finding Numerical solution for Ordinary Differential equation ............. 31
7.4.
Appendix 4 : Matlab: Mathieu's Equation 2 Dimensions .......................................... 33
7.5.
Appendix 5: Matlab Mathieu’s equation with Angular frequency variation .............. 34
7.6.
Appendix 6: Matlab Solving and plotting negative parameters.................................. 35
7.7.
Appendix 7: Simulink diagram to obtain mass displacements.................................... 36
7.8.
Appendix 8: Simulation User guide: ............................................................................ 37
7.9.
Appendix 9: Reprogramming ODE45 function for GPU .............................................. 37
7.10. Appendix 10 Reprogramming Eig.m ............................................................................ 39
References:.................................................................................................................................. 40
28
6.1.
Appendix 1 : Matlab: Meissner's equation
% Initials
alpha=0;beta=0;
w1=sqrt(alpha+beta); w2=sqrt(alpha-beta);
resolution=0.01;X_end=5;
% Functions
f1 = inline('abs(2*cos(pi()*w1)*cos(pi()*w2)(w1/w2+w2/w1)*sin(pi()*w1)*sin(pi()*w2))','w1','w2')
f2 = inline('abs(2*cos(pi()*w1)-pi()*w1*sin(pi()*w1))','w1','w2')
f3 = inline('abs(2*cos(pi()*w1)*cosh(pi()*abs(w2))-(w1/abs(w2)abs(w2)/w1)*sin(pi()*w1)*sinh(pi()*abs(w2)))','w1','w2')
% Stability analysis
for alpha=0:resolution:X_end
for beta=0:resolution:X_end
w1=sqrt(alpha+beta)+eps; %+eps to not divide by 0 !
w2=sqrt(alpha-beta)+eps;
if alpha-beta>0
f1(w1,w2)
if f1(w1,w2)<2
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[1];
else
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[0];
end
end
if alpha-beta==0
f2(w1,w2)
if f2(w1,w2)<2
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[1];
else
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[0];
end
end
if alpha-beta<0
f3(w1,w2)
if f3(w1,w2)<2
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[1];
else
k(round((alpha+resolution)/resolution),round((beta+resolution)/resolut
ion))=[0];
end
end
end
end
%Plotting
alpha= 0:resolution:X_end; beta= 0:resolution:X_end;
[X,Y] = meshgrid(beta,alpha);
surf(Y,X,k,'EdgeColor','none','LineStyle','none');
XLABEL('Alpha');YLABEL('Beta')
29
6.2.
Appendix2: Matlab: Mathieu's Equation x''+(alpha+beta*cos(t))x
=0
% Initialization
clc ; clear all;
X1_int=[1 0 ]';
X2_int=[0 1 ]';
X_int=[X1_int X2_int]; % Initial Conditions
% Variables
global alpha beta t
% Parameters
resolution=0.1;X_end=2.5;
Error=0.001;
tspan=[0,2*pi()];options= odeset('RelTol',1e-5,'AbsTol',1e-5);
%Options for ode45
%Solving
for alpha=0:resolution:X_end
for beta=0:resolution:X_end
for n=1:1:2
[t,Y] = ode45(@Mathieu1D,tspan,X_int(:,n),options,alpha,beta);
for m=1:1:2
Y_sol(m,n)=Y(end,m); % Solution at 2*pi()
end
end
%Eigenvalue Max
Eig_max=max(abs(eig(Y_sol)));
if Eig_max >=1+Error
k1(round((alpha+resolution)/resolution),...
round((beta+resolution)/resolution))=[0]; %White or Blue
else
k1(round((alpha+resolution)/resolution),...
round((beta+resolution)/resolution))=[1]; % Black or Red
end
end
end
% Plotting
figure;
alpha= 0:resolution:X_end;
beta= 0:resolution:X_end;
[X,Y] = meshgrid(beta,alpha);
colormap(jet)
hand=surf(Y,X,k1,'EdgeColor','none','LineStyle','none');
XLABEL('Alpha')
YLABEL('Beta')
function [dx_dt]= Mathieu1D(t,x,alpha,beta)
D1=alpha+beta*sign(cos(t));
D=[-D1 0];C=[0 1];
R=[C;D];
dx_dt=R*x;
return
30
6.3.
Appendix 3: Finding Numerical solution for Ordinary
Differential equation
The sensitive part of this code is to find the solution of this differential equation to obtain
correct eigenvalues. Matlab for this goal has various tools for numerically solving, finding the
right function is not an easy task, in this following section, a quick presentation of the chosen
function will be discussed.
The two most used built-in functions are ode23() and ode45(), which implement versions of
Runge-Kutta 2nd/3rd order and Runge-Kutta 4th/5th order respectively. The basic usage for these
Matlab’s solvers is of this following use:
> ode45(function, domain, initial conditions, options, parameters)
Options: Several options are available for Matlab’s ode45 solver, giving the user a limited
control on the algorithm. Two important options are relative and absolute tolerance,
respectively RelTol and AbsTol in Matlab. At each step of the ode45 algorithm, an error is
approximated for that step. If 𝑦𝑘 is the approximation of 𝑦(𝑥𝑘 ) at step k, and 𝑒𝑘 is the
approximate er
ror at this step, then Matlab chooses its partition to insure
𝑒𝑘 ≤ max(𝑅𝑒𝑙𝑇𝑜𝑙 ∗ 𝑦𝑘 , 𝐴𝑏𝑠𝑇𝑜𝑙)
Where the default values are RelTol =.001 and AbsTol =.000001. As an example for when we
might want to change these values, observe that if 𝑦𝑘 becomes large, then the error 𝑒𝑘 will be
allowed to grow quite large. In this case, we increase the value of RelTol.
Solver
ode45
ode23
ode113
Implicit/Explicit
Explicit
Explicit
Explicit
Accuracy
4th order, medium accuracy
2nd/3rd order, low accuracy
Very accurate (13th order)
ode15s
ode23s
Implicit
Implicit
ode23tb
Implicit
Low to medium
Low (might be more stable
than ode15s)
Low (might be more stable
than ode15s)
When to Use
Most common
For crude error tolerances
solving computationally
intensive problems
For stiff problems
For moderately stiff
problems
For moderately stiff
problems with damping
A basic uses in Matlab for ODE are ode45, ode23 and ode15s (the “s” signifies that it uses an
implicit method). The solver able to estimate the error in the solution at each time step, and
decide whether or not the time step is too large (error too large) or too small (inefficient)
ODE45 (an explicit Runge-Kutta method) is efficient, but can become unstable with stiff
systems. This will manifest itself by the solver taking shorter and shorter time steps to
compensate. The solution will either take a long time, or the time step will be reduced to the
point where machine precision causes the routine to fail.
31
ODE15s should only be used for stiff problems. Because it is an implicit scheme, it will have to
solve (possibly large) sets of equations at each time step.
Matlab’s Solvers do not need to specify a step size. ODE45 uses the explicit fourth order
Runge-Kutta-Fehlberg method, which also gives an estimate of the truncation error at each
step. The solver is able to choose a step size which meets the error tolerance we specify.
Options are set by creating an options structure with the odeset command.
Stiff equations are differential equations for which certain numerical methods for solving
equation are numerically unstable, and lead to rapid variation unless the step size is taken to
be extremely small. The question is to know if Mathieu’s equation can lead to a stiff problem.
If it was the case, the basic ode solver would return an error message. For all tests done during
this internship the ode45 has never return this type of error. It is fair enough to assume the
Mathieu’s equation is not a stiffness equation. However, a couple specified parameters can
one day leads to this problem.
32
6.4.
Appendix 4 : Matlab: Mathieu's Equation 2 Dimensions
% Mathieu's Equation is x''+(Alpha*A+beta*B*cos(t))x = 0 for 2
dimensons
global alpha beta t
X1_int=[1 0 0 0]';X2_int=[0 1 0 0]';
X3_int=[0 0 1 0]';X4_int=[0 0 0 1]';
X_int=[X1_int X2_int X3_int X4_int]; % Initial Conditions
resolution=0.01;X_fin=3;
tspan=[0,2*pi()];options= odeset('RelTol',1e-5,'AbsTol',1e-5);
%k1=zeros(X_fin/resolution+1,X_fin/resolution+1);
for alpha=0:resolution:X_fin
disp([' Computing ', num2str(alpha) ,' : ', num2str(X_fin)]);
for beta=0:resolution:X_fin
for n=1:1:4
[t,Y] = ode45(@Mathieu2D,tspan,X_int(:,n),options,alpha,beta);
for m=1:1:4
Y_sol(m,n)=Y(end,m);
end
end
%Eigenvalues
Eig_max=max(abs(eig(Y_sol)));
Error=0.001;
if Eig_max >=1+Error
k1(round((alpha+resolution)/resolution),round((beta+resolution)/resolu
tion))=[0]; %White
else
k1(round((alpha+resolution)/resolution),round((beta+resolution)/resolu
tion))=[1]; % Black
end
end
end
% Plotting
figure;
disp([' Plotting ...']);
alpha= 0:resolution:X_fin; beta= 0:resolution:X_fin;
[X,Y] = meshgrid(beta,alpha);
colormap(jet)
hand=surf(Y,X,k1,'EdgeColor','none','LineStyle','none');
XLABEL('Alpha')
YLABEL('Beta')
function [dx_dt]= Mathieu2D(t,x,alpha,beta)
A=[1 0 ; 0 1]; B=[1.4 0 ; 0 1.4];
D1=alpha*A+beta*B*cos(t);
D=[-D1 zeros(2)];
C=[zeros(2) eye(2)];
R=[C;D];
dx_dt=R*x;
return
33
6.5.
Appendix 5: Matlab Mathieu’s equation with Angular frequency
variation
% Mathieu's Equation is x''+(Alpha*A+beta*B*cos(wt))x = 0
global alpha;alpha=1;
X1_int=[1 0 ]';X2_int=[0 1 ]';
X_int=[X1_int X2_int ]; % Initial Conditions
resolution=0.01;X_max=2;X_min=-2;
options= odeset('RelTol',1e-5,'AbsTol',1e-5);
for w=X_min:resolution:X_max
if abs(w)< 0.1
for beta=X_min:resolution:X_max
k1(round((w+resolution+abs(X_min))/resolution),round((beta+resolution+
abs(X_min))/resolution))=[0];
end
else
tspan=[0,2*pi()/w];
disp([' Computing ', num2str(w) ,' : ', num2str(X_max)]);
for beta=X_min:resolution:X_max
for n=1:1:2
[t,Y] = ode45(@hillomega,tspan,X_int(:,n),options,w,beta);
for m=1:1:2
Y_sol(m,n)=Y(end,m);
end
end
%Eigenvalues
Eig_max=max(abs(eig(Y_sol)));
Error=0.0008;
if Eig_max >=1+Error
k1(round((w+resolution+abs(X_min))/resolution),round((beta+resolution+
abs(X_min))/resolution))=[0]; %White
else
k1(round((w+resolution+abs(X_min))/resolution),round((beta+resolution+
abs(X_min))/resolution))=[1]; % Black
end
end
end
end
% Plotting
figure;
w=X_min:resolution:X_max;
beta= X_min:resolution:X_max;
[X,Y] = meshgrid(beta,w);
colormap(jet)
hand=surf(Y,X,k1,'EdgeColor','none','LineStyle','none');
xlabel('Omega')
ylabel('Beta')
function [dx_dt]= hillomega(t,x,omega,beta)
global alpha;
D1=alpha/(omega*omega)+beta/(omega*omega)*cos(omega*t);
Matrice_eq=[0 1;-D1 0];
dx_dt=Matrice_eq*x;
return
34
6.6.
Appendix 6: Matlab Solving and plotting negative parameters
Mathieu's equation x''+(Alpha*A+beta*B*cos(t))x = 0 for 2 dimensions
%Initialization
global alpha beta t
X1_int=[1 0 0 0]'; X2_int=[0 1 0 0]';
X3_int=[0 0 1 0]'; X4_int=[0 0 0 1]';
X_int=[X1_int X2_int X3_int X4_int]; % Initial Conditions
X_min=-1;
resolution=0.01;X_max=3.5;
tspan=[0,2*pi()];options= odeset('RelTol',1e-5,'AbsTol',1e-5);
for alpha=X_min:resolution:X_max
for beta=X_min:resolution:X_max
for n=1:1:4
[t,Y] = ode45(@Mathieu2D,tspan,X_int(:,n),options,alpha,beta);
for m=1:1:4
Y_sol(m,n)=Y(end,m);
end
end
%Eigenvalues
Eig_max=max(abs(eig(Y_sol)));
Error=0.001;
if Eig_max >=1+Error
k1(round((alpha+resolution+abs(X_min))/resolution),round((beta+resolut
ion+abs(X_min))/resolution))=[0]; %Red
else
k1(round((alpha+resolution+abs(X_min))/resolution),round((beta+resolut
ion+abs(X_min))/resolution))=[1]; % Blue
end
end
end
% Plotting
figure;
alpha= X_min:resolution:X_max;
beta= X_min:resolution:X_max;
[X,Y] = meshgrid(beta,alpha);
hand=surf(Y,X,k1,'EdgeColor','none','LineStyle','none');
function [dx_dt]= Mathieu2D(t,x,alpha,beta)
A=[1 0 ; 0 1]; B=[1.4 0 ; 0 1.4];
D1=alpha*A+beta*B*cos(t);
D=[-D1 zeros(2)];
C=[zeros(2) eye(2)];
R=[C;D];
dx_dt=R*x;
return
35
6.7.
Appendix 7: Simulink diagram to obtain mass displacements
36
6.8.
Appendix 8: Simulation User guide:
The very first is to run your version of Matlab, followed by the file “Start Program.m”. As soon
as the “Start Program.m” is running, a new window appears to the user. This unique window
permits to the user to calibrate all parameters for his simulation:
The mass of the two blocks (in kilograms)
The stiffness, the stiffness max for varying springs (in Newton/meter)
The position limits for the two block symbolized in the diagram by the two black
lines(meter) As soon as one of the two blocks touches the system is declared as
unstable.
Initial positions of the two blocks from the limit position 1 (meter)
Initial velocities for each block (meter/second)
Initial acceleration for each block (meter/second*second)
Simulation time (second), Maximum value of time for the simulation and animation
Step size (second), if this value is too small, the animation will be considerably slowed.
Angular frequency for the stiffness variations (radian/second)
The animation accepts all values for all parameters, the user’s responsibility is to make sure
the positions of the blocks and limits 1 and 2 are in the right order. However, Matlab might
never start the simulation.
The masses and the stiffness values can be entered as negative values. The animation always
calibrates on the values entered by the users and should never presents out of range results.
6.9.
Appendix 9: Reprogramming ODE45 function for GPU
As the following program computing on GPU is much larger than the others, this GPU version is
only available electronically (CD, USB key).
The formula for the Euler method is
yn+1 = yn + hf(xn , yn )
Which advances a solution from xn to xn+1 ≡ xn + h. The formula is unsymmetrical: It
advances the solution through an interval h, but uses derivative information only at the
begging of that interval. That means that the step’s error is only one power of h smaller than
the correction.
There are several reasons that Euler’s method is not recommended for practical use, among
them, the method is not very accurate when compared to other, fancier, methods run at the
equivalent step size, and neither is it very stable.
37
Consider, however, the use of a step to take a “trial” step to the midpoint of the interval. Then
use the value of both x and y at that midpoint to compute the “real” step across the whole
interval. In equations,
k1 = hf(xn , yn )
1
1
k 2 = hf (xn + h, yn + k1 )
2
2
yn+1 = yn + k 2 + O(h3 )
As indicated in the error term, this symmetrization cancels out the first-order error term,
making the method second order. [A method is conventionally called nth order if its error
terms is O(hn+1 )]. In these equations above, the system is called the second order RungeKutta or midpoint method.
By far the most often used is the classical fourth-order Runge-Kutta formula which has a
certain sleekness of organization about it:
k1 = hf(xn , yn )
h
k1
k 2 = hf (xn + , yn + )
2
2
h
k2
k 3 = hf (xn + , yn + )
2
2
k 4 = hf(xn + h, yn + k 3 )
yn+1 = yn +
k1 k 2 k 3 k 4
+ + + + O(h5 )
6
3
3
6
The fourth-order Runge-Kutta method requires four evaluations of the right-hand side per step
h. This will be superior to the midpoint method if at least twice as large a step is possible for
the same accuracy.
Adaptive Stepsize control for Runge-Kutta
A good ODE integrator should exert some adaptive control over its own progress, making
frequent changes in its step size. Usually the purpose of this adaptive step size control is to
achieve some predetermined accuracy in the solution with minimum computational effort.
Many small steps should tiptoe through treacherous terrain, while a few great strides should
speed through smooth uninteresting countryside. The resulting gains in efficiency are not mere
tens of percents or factors of two; they can sometimes be factors of ten, a hundred, or more.
Sometimes accuracy may be demanded not directly in the solution itself, but in some related
conserved quantity that can be monitored.
38
6.10. Appendix 10 Reprogramming Eig.m
𝑎 𝑏
Special case for matrices 2-by-2: 𝐴 = [
]
𝑐 𝑑
Trace of this matrice: 𝑡𝑟𝑎𝑐𝑒(𝐴) = 𝑎 + 𝑑
Determinant of this matrice: det(𝐴) = 𝑎𝑑 − 𝑏𝑐
Eignevalue 1: 𝐿1 =
Eignevalue 2 : 𝐿2 =
𝑡𝑟𝑎𝑐𝑒(𝐴)
2
𝑡𝑟𝑎𝑐𝑒(𝐴)
2
+ √𝑡𝑟𝑎𝑐𝑒(𝐴) ∗
𝑡𝑟𝑎𝑐𝑒(𝐴)
− √𝑡𝑟𝑎𝑐𝑒(𝐴) ∗
𝑡𝑟𝑎𝑐𝑒(𝐴)
4
4
− det(𝐴)
− det(𝐴)
Matlab function:
function [L1 L2]=G_eig(A,B,C,D)
T=A+D; % Trace
Determinant=A*D-B*C;
L1=T/2+sqrt(T*T/4-Determinant);
L2=T/2-sqrt(T*T/4-Determinant);
return
39
References:
[1] C. CHEN, Linear system theory and design, Oxford University, 1999
[2] R. W. BROCKET, Finite dimensional linear system, John Wiley and sons, 1970.
[3] Ô TURHAN, Generalized Bolotin’s method for stability limits determination of parametrically
excited systems, 1998.
[4] C. GRANT, Mathematical lecture on periodic linear system, Brigham Young University, 1999.
[5] D. ROTHMAN, M.I.T. open courseware - Parametric Oscillator,
http://ocw.mit.edu/courses/earth-atmospheric-and-planetary-sciences/12-006j-nonlineardynamics-i-chaos-fall-2006/lecture-notes/, 2006
[6] T.I. FOSSEN, H. NIJMEIJER, Parametric Resonances in dynamical systems, Springer,
2012.
[7] D. W. JORDAN, P. SMITH, Nonlinear Ordinary Differential Equations, Keele University,
2007.
[8] K. Karan, Process dynamics and numerical methods: Solving Nonlinear Equation in
MATLAB, Queen’s University, 2007.
[9] A. CONSTANTINIDES, N. MOSTOUFI, Numerical methods for chemical engineers with
Matlab applications, 1999.
[10] P. GETREUER, Writing fast Matlab code, 2006.
[11] MATHWORKS, Parallel computing toolbox user’s guide, 2012.
[12] X. ZHANG, W. LI, Y. ZHOU, A Variable Stiffness MR Damper for Vibration Suppression
2009.
[13] P.SEYRANIAN, A. MAILYBAEV, Multi-parameter stability theory with mechanical
applications, Moscow state Lomonosov University, Russia 2003.
[14]J. PODEŠVA, J. POLÁK, Instable parametric oscillation during the rope track transport,
Technické univerzity Ostrava, 2008.
[15] J. BURKARD, G. CLI, MATLAB parallel computing, Virginia Tech, 08 February
2010
[16 ]J. GYU, Vibration simulation using Matlab, KYOTO, JAPAN
MAY 2003
[17] M.TREMONT, Solving ODEs in Matlab, 2009
(http://mit.edu/voigtlab/BP205/Notes/BP205_Matlab_slides.pdf)
[18] K.L., MILLER, S.A., HARTWELL, Five parametric resonances in a micro-electromechanical
system, p 149–152, 1998
[19] RAMOS, L.A., BURGNER, Robust micro-rate sensor actuated by parametric resonance.
Sensors and Actuators A: Physical, P80–87, 2009
[20] ZHANG, W., TURNER, K.L, Application of parametric resonance amplification in a singlecrystal silicon micro-oscillator based mass sensor. P23–30, 2005
40
[21] OLVERA, A. PRADO, E. CZITROM: Performance improvement of OWC systems by
parametric resonance, European Wave Energy Conference, 2001
41