Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
ECES 481/681 – Statistical Pattern Recognition
Andrew Cohen
Drexel University
Lecture 1-Bayesian classification
1
Today
Syllabus
ground rules
Prerequisite
Grading
Projects!
Schedule
Attendance is mandatory
Lecture 1
Theoridis and Koutroumbas
2
Course slides adapted from textbook:
Sergios Theodoridis
Konstantinos Koutroumbas
Version 3
3
PATTERN RECOGNITION
Typical application areas
Machine vision
Character recognition (OCR)
Computer aided diagnosis
Speech recognition
Face recognition
Biometrics
Image Data Base retrieval
Data mining
Bionformatics
The task: Assign unknown objects – patterns – into the correct
class. This is known as classification.
4
What is pattern recognition?
Pattern recognition
Data mining
Machine learning
Computer vision
Voice and image processing
Neural networks and fuzzy logic
Information theory
(applied) probability and statistics
Artificial intelligence
… and many more
5
An example
6
Retinal stem cell time sequence of feature vectors
DatasetName: 'DCC43 XY point 51 ; 11'
RawFeatures: [363x8 double]
TimeStamp: [363x1 double]
idxTrue: 2
idxCell: 1
Features: [362x6 double]
FeatureLabels: {'[dxy]' 'tot_dist' 'phi_dist' 'e' 's'}
7
Features: These are measurable quantities obtained from
the patterns, and the classification task is based on their
respective values.
Feature vectors: A number of features
x1 ,..., xl ,
constitute the feature vector
T
l
x x1 ,..., xl R
Feature vectors are treated as random vectors.
8
An example:
9
The classifier consists of a set of functions, whose values,
computed at x , determine the class to which the
corresponding pattern belongs
Classification system overview
Patterns
sensor
feature
generation
feature
selection
classifier
design
system
evaluation
10
Supervised – unsupervised – semisupervised pattern
recognition:
The major directions of learning are:
Supervised: Patterns whose class is known a-priori
are used for training.
Unsupervised: The number of classes/groups is (in
general) unknown and no training patterns are
available.
Semisupervised: A mixed type of patterns is
available. For some of them, their corresponding class
is known and for the rest is not.
11
Chapter 2 - CLASSIFIERS BASED ON
BAYES DECISION THEORY
Statistical nature of feature vectors
x x1 , x2 ,..., xl
T
Assign the pattern represented by feature vector x
to the most probable of the available classes
1 , 2 ,...,M
That is
x i : P(i x)
maximum
12
Computation of a-posteriori probabilities
Assume known
• a-priori probabilities
P(1 ), P(2 )..., P(M )
•
p( x i ), i 1,2,..., M
This is also known as the likelihood of
x w.r. to i .
13
The Bayes rule (Μ=2)
p ( x) P(i x) p ( x i ) P(i )
P(i x)
where
p ( x i ) P(i )
p ( x)
2
p ( x) p ( x i ) P(i )
i 1
14
The Bayes classification rule (for two classes M=2)
Given x classify it according to the rule
If P(1 x ) P(2 x ) x 1
If P(2 x ) P(1 x ) x 2
Equivalently: classify
x
according to the rule
p( x 1 ) P(1 )() p( x 2 ) P(2 )
For equiprobable classes the test becomes
p( x 1 )() p( x 2 )
15
R1 ( 1 ) and R2 ( 2 )
16
Equivalently in words: Divide space in two regions
If x R1 x in 1
If x R2 x in 2
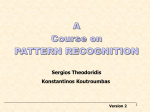
Probability of error
Total shaded area
x0
1
1
P
p
(
x
)
dx
e
2
2
2
p
(
x
)
dx
1
x0
Bayesian classifier is OPTIMAL with respect to
minimising the classification error probability!!!!
17
Indeed: Moving the threshold the total shaded
area INCREASES by the extra “grey” area.
18
The Bayes classification rule for many (M>2) classes:
Given x classify it to i if:
P(i x) P( j x) j i
Such a choice also minimizes the classification error
probability
Minimizing the average risk
For each wrong decision, a penalty term is assigned since
some decisions are more sensitive than others
19
For M=2
• Define the loss matrix
11 12
L(
)
21 22
•
12 penalty term for deciding class 2
,
although the pattern belongs to 1 , etc.
Risk with respect to
1
r1 11 p( x 1 )d x 12 p( x 1 )d x
R1
R2
20
Risk with respect to
2
r2 21 p( x 2 )d x 22 p( x 2 )d x
R1
R2
Probabilities of wrong decisions,
weighted by the penalty terms
Average risk
r r1P(1 ) r2 P(2 )
21
Choose R1 and R2 so that r is minimized
i if
1 11 p( x 1 ) P(1 ) 21 p( x 2 ) P(2 )
Then assign
x
to
2 12 p( x 1 ) P(1 ) 22 p( x 2 ) P(2 )
Equivalently:
assign x in 1 (2 )
if
p ( x 1 )
P(2 ) 21 22
12
()
p ( x 2 )
P(1 ) 12 11
12
: likelihood ratio
22
If
1
P(1 ) P(2 ) and 11 22 0
2
21
x 1 if P( x 1 ) P( x 2 )
12
12
x 2 if P( x 2 ) P( x 1 )
21
if 21 12 Minimum classifica tion
error probabilit y
23
An example:
p( x 1 )
1
p( x 2 )
1
exp( x )
2
exp( ( x 1) 2 )
1
P(1 ) P(2 )
2
0 0.5
L
1.0 0
24
Then the threshold value is:
x0 for minimum Pe :
x0 : exp( x 2 ) exp( ( x 1) 2 )
1
x0
2
Threshold x̂0 for minimum r
xˆ0 : exp ( x 2 ) 2 exp (( x 1) 2 )
(1 n2) 1
xˆ0
2
2
25
1
x0
Thus x̂0 moves to the left of
2
(WHY?)
26
DISCRIMINANT FUNCTIONS
DECISION SURFACES
If Ri , R j are contiguous:
g ( x) P(i x) P( j x) 0
Ri : P(i x) P( j x)
+
-
g ( x) 0
R j : P( j x) P(i x)
is the surface separating the regions. On the one
side is positive (+), on the other is negative (-). It is
known as Decision Surface.
27
If f (.) monotonically increasing, the rule remains the same if we use:
x i if : f (P(i x)) f (P( j x)) i j
gi ( x) f ( P(i x))
is a discriminant function.
In general, discriminant functions can be defined independent of the
Bayesian rule. They lead to suboptimal solutions, yet, if chosen
appropriately, they can be computationally more tractable.
Moreover, in practice, they may also lead to better solutions. This,
for example, may be case if the nature of the underlying pdf’s are
unknown.
28
THE GAUSSIAN DISTRIBUTION
The one-dimensional case
p ( x)
( x )2
1
exp
2
2
2
where
is the mean value, i.e.: E x
xp( x)dx
2 is the variance,
2 E ( x E x ) 2
2
(
x
)
p ( x)dx
29
The Multivariate (Multidimensional) case:
p ( x)
1
2
(2 )
1
2
1
exp ( x )T 1 ( x )
2
where is the mean value, E x
and
is known as the covariance matrix and it is defined as:
E[( x )( x )T ]
An example: The two-dimensional case:
1
x 1
1
1 1
p( x) px1 , x2
exp x1 1 , x2 2
1
x2 2
2
2
2
x1 1
12
1 Ex1
x1 1 , x2 2
E
,
x2 2
2 Ex2
where
E( x1 1 )( x2 2 )
22
30
BAYESIAN CLASSIFIER FOR NORMAL
DISTRIBUTIONS
Multivariate Gaussian pdf
p ( x i )
1
2
(2 ) i
1
2
1
exp ( x i ) i1 ( x i )
2
i E x is an 1 vector, for x i
i E ( x i )( x i )
is the covariance matrix.
31
ln( ) is monotonic. Define:
g i ( x) ln( p( x i ) P(i ))
ln p( x i ) ln P(i )
1
T 1
g i ( x) ( x i ) i ( x i ) ln P (i ) Ci
2
1
Ci ( ) ln 2 ( ) ln i
2
2
Example:
2 0
i
2
0
32
g i ( x)
1
2 2
1
2
2
(x x )
2
1
2
2
1
2
( i1 x1 i 2 x2 )
( i21 i22 ) ln( Pi ) Ci
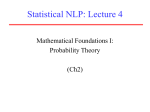
That is, g i (x) is quadratic and the surfaces
g i ( x) g j ( x) 0
quadrics, ellipsoids, parabolas, hyperbolas,
pairs of lines.
33
Example 1:
Example 2:
34
Decision Hyperplanes
Quadratic terms:
x x
T
1
i
If ALL Σ i Σ (the same) the quadratic
terms are not of interest. They are not
involved in comparisons. Then, equivalently,
we can write:
g i ( x) wi x wio
T
wi Σ 1 i
1 Τ 1
wi 0 ln P(i ) i Σ i
2
Discriminant functions are LINEAR.
35
Let in addition:
•
Σ 2 I . Then
g i ( x)
•
1
2
Ti x wi 0
g ij ( x) g i ( x) g j ( x) 0
w ( x xo )
T
•
w i j,
•
P (i ) i j
1
2
x o ( i j ) ln
P( j ) 2
2
j
i
36
Remark :
1
• If p(1 ) p(2 ) , then x 0
1 2
2
37
• If p 1 p 2 , the linear classifier moves towards the
class with the smaller probability
38
Nondiagonal:
2
•
gij ( x) w ( x x 0 ) 0
•
w ( i j )
•
T
1
i j
P(i )
1
x 0 ( i j ) n (
)
2
P( j ) 2
i
j 1
where
x
( x 1 x)
T
1
Decision hyperplane
1
2
not normal to i j
normal to 1 ( i j )
39
Minimum Distance Classifiers
1
P (i )
equiprobable
M
1
T 1
g
(
x
)
(
x
)
(x i )
i
i
2
2 I : Assign x i :
Euclidean Distance: d E x i
smaller
I : Assign x i :
2
Mahalanobis Distance: d m (( x i ) ( x i ))
smaller
T
1
1
2
40
41
Example:
Given 1 , 2 : P(1 ) P(2 ) and p( x 1 ) N ( 1 , Σ ),
0
3
1.1 0.3
p( x 2 ) N ( 2 , Σ ), 1 , 2 ,
0
3
0
.
3
1
.
9
1.0
classify t he vector x using Bayesian classifica tion :
2.2
0.95 0.15
Σ
0
.
15
0
.
55
Compute Mahalanobi s d m from 1 , 2 : d 2 m,1 1.0, 2.2
-1
1.0
2
1 2.0
Σ 2.952, d m, 2 2.0, 0.8
3.672
2.2
0.8
1
Classify x 1. Observe that d E ,2 d E ,1
42
ESTIMATION OF UNKNOWN PROBABILITY
DENSITY FUNCTIONS
Maximum Likelihood
Let x , x ,...., x known and independen t
1
2
N
Let p( x) known with in an unknown ve ctor
parameter : p( x) p( x; )
X x1 , x 2 ,...x N
p( X ; ) p( x1 , x 2 ,...x N ; )
N
p ( x k ; )
k 1
which is known as the Likelihood of w.r. to X
The method :
43
Ν
ˆ ML : arg max p ( x k ; )
k 1
N
L( ) ln p ( X ; ) ln p ( x k ; )
k 1
N
p
(
x
)
L
(
)
1
k
;
0
ˆ ML :
( ) k 1 p ( x k ; ) ( )
44
45
If, indeed, there is a 0 such that
p ( x) p ( x; 0 ), then
lim E[ˆ ]
N
ML
lim E ˆ ML 0
N
0
2
0
Asymptotically unbiased and consistent
46
Estimation Bias And Consistency
The bias of an estimator is the difference between
this estimator's expected value and the true value
of the parameter being estimated
bias(ˆ) E[ˆ] E[ˆ ]
An estimator is said to be consistent if it converges
in probability to the true value of the parameter
47
Example:
p ( x) : N ( , Σ ) : unknown,
x1 , x 2 ,..., x N p ( x k ) p ( x k ; )
1 N
L( ) ln p ( x k ; ) C ( x k )T Σ 1 ( x k )
k 1
2 k 1
1
1
T
1
p( x k ; )
exp(
(
x
)
Σ
( x k ))
k
l
1
2
2
2
(2 ) Σ
N
L
1
.
N
N
L( )
1
1
. Σ ( x k ) 0 ML x k
k 1
N k 1
.
L
l
( A )
T
Remember : if A A
2 A
T
48
Maximum Aposteriori Probability Estimation
In ML method, θ was considered as a parameter
Here we shall look at θ as a random vector
described by a pdf p(θ), assumed to be known
Given
X x1 , x 2 ,..., x N
Compute the maximum of
p( X )
From Bayes theorem
p( ) p( X ) p( X ) p( X ) or
p( X )
p( ) p( X )
p( X )
49
The method:
ˆ MAP arg max p( X ) or
ˆ
( P( ) p ( X ))
MAP :
If p ( ) is uniform or broad enough ˆ MAP ML
50
51
Example:
p( x) : N ( , 2 Ι ), unknown, X x1,...,x N
p( )
1
l
2
(2 ) l
exp(
0
2
2
2
)
N
N 1
1
MAP :
ln( p( x k ) p( )) 0 or 2 ( x k ) 2 ( ˆ 0 ) 0
k 1
k 1
2 N
2
0 2 xk
k
1
ˆ MAP
For 2 1, or for N
2
1 2 N
1 N
ˆ MAP ˆ ML x k
N k 1
52
Nonparametric Estimation
k N in h
N total
1 kN
h
pˆ ( x) pˆ ( xˆ )
, x - xˆ
h N
2
kN
P
N
h
x̂
2
x̂
h
x̂
2
In words : Place a segment of length h at x̂
and count points inside it.
If p (x ) is continuous: p( x) p( x) as N , if
hN 0,
k N ,
kN
0
N
53
Parzen Windows
Place at x a hypercube of length
points inside.
h and count
54
Define
1
1
xij
( xi )
2
0 otherwise
• That is, it is 1 inside a unit side hypercube centered
at 0
1 1
ˆ
• p( x) l (
h N
•
xi x
(
))
h
i 1
N
1
1
* * number of points inside
volume N
an h - side hypercube centered at x
• The problem:
p ( x) continuous
(.) discontinu ous
• Parzen windows-kernels-potential functions
( x) is smooth
( x) 0, ( x)d x 1
x
55
Mean value
1 1
E[ pˆ ( x)] l (
h N
N
E[ (
i 1
xi x
1
x' x
)]) l (
) p ( x' )d x'
h
h
h
x'
1
• h 0, l
h
x' x
)0
• h 0 the width of (
h
The bias of an estimator
1
x ' x
is the difference between
)d x 1
• l (
this estimator's expected
h
h
value and the true value
1
x
of the parameter being
• h 0 l ( ) ( x)
estimated
h
h
E[ pˆ ( x)] ( x' x) p( x' )d x' p( x)
x'
Hence unbiased in the limit
56
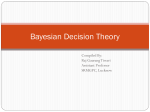
Variance
• The smaller the h the higher the variance
h=0.1, N=1000
h=0.8, N=1000
57
h=0.1, N=10000
The higher the N the better the accuracy
58
If
• h0
• N
• hN
asymptotically unbiased
The method
• Remember:
p ( x 1 )
P (2 ) 21 22
l12
()
p( x 2 )
P (1 ) 12 11
•
1
N1h l
1
N 2 hl
xi x
(
)
h
i 1
()
N2
xi x
(
)
h
i 1
N1
59
CURSE OF DIMENSIONALITY
In all the methods, so far, we saw that the highest
the number of points, N, the better the resulting
estimate.
If in the one-dimensional space an interval, filled
with N points, is adequate (for good estimation), in
the two-dimensional space the corresponding square
will require N2 and in the ℓ-dimensional space the ℓdimensional cube will require Nℓ points.
The exponential increase in the number of necessary
points in known as the curse of dimensionality. This
is a major problem one is confronted with in high
dimensional spaces.
60
An Example :
61
NAIVE – BAYES CLASSIFIER
Let x and the goal is to estimate px | i
i = 1, 2, …, M. For a “good” estimate of the pdf
one would need, say, Nℓ points.
Assume x1, x2 ,…, xℓ mutually independent. Then:
px | i px j | i
j 1
In this case, one would require, roughly, N points
for each pdf. Thus, a number of points of the
order N·ℓ would suffice.
It turns out that the Naïve – Bayes classifier
works reasonably well even in cases that violate
the independence assumption.
62
K Nearest Neighbor Density Estimation
In Parzen:
• The volume is constant
• The number of points in the volume is varying
Now:
• Keep the number of points
constant
kN k
• Leave the volume to be varying
k
ˆ ( x)
•p
NV ( x)
63
•
k
N 2V2
N1V1
()
k
N1V1
N 2V2
64
The Nearest Neighbor Rule
Choose k out of the N training vectors, identify the k
nearest ones to x
Out of these k identify ki that belong to class ωi
Assign
x i : ki k j i j
The simplest version
k=1 !!!
For large N this is not bad. It can be shown that:
if PB is the optimal Bayesian error probability, then:
PB PNN
M
PB (2
PB ) 2 PB
M 1
65
PB PkNN PB
2 PNN
k
k , PkNN PB
For small PB:
PNN 2 PB
P3 NN PB 3( PB ) 2
An example:
66
Voronoi tesselation
Ri x : d ( x, x i ) d ( x, x j ) i j
67
BAYESIAN NETWORKS
Bayes Probability Chain Rule
p( x1 , x2 ,..., x ) p( x | x 1 ,..., x1 ) p( x 1 | x 2 ,..., x1 ) ...
... p( x2 | x1 ) p( x1 )
Assume now that the conditional dependence for
each xi is limited to a subset of the features
appearing in each of the product terms. That is:
p( x1 , x2 ,..., x ) p( x1 ) p( xi | Ai )
i 2
where
Ai xi 1 , xi 2 ,..., x1
68
For example, if ℓ=6, then we could assume:
p( x6 | x5 ,..., x1 ) p( x6 | x5 , x4 )
Then:
A6 x5 , x4 x5 ,..., x1
The above is a generalization of the Naïve – Bayes.
For the Naïve – Bayes the assumption is:
Ai = Ø, for i=1, 2, …, ℓ
69
A graphical way to portray conditional dependencies
is given below
According to this figure we
have that:
• x6 is conditionally dependent on
x4, x5
• x5 on x4
• x4 on x1, x2
• x3 on x2
• x1, x2 are conditionally
independent on other variables.
For this case:
p( x1 , x2 ,..., x6 ) p( x6 | x5 , x4 ) p( x5 | x4 ) p( x3 | x2 ) p( x2 ) p( x1 )
70
Bayesian Networks
Definition: A Bayesian Network is a directed acyclic
graph (DAG) where the nodes correspond to random
variables. Each node is associated with a set of
conditional probabilities (densities), p(xi|Ai), where xi
is the variable associated with the node and Ai is the
set of its parents in the graph.
A Bayesian Network is specified by:
• The marginal probabilities of its root nodes.
• The conditional probabilities of the non-root nodes,
given their parents, for ALL possible values of the
involved variables.
71
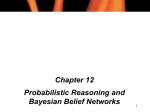
The figure below is an example of a Bayesian
Network corresponding to a paradigm from the
medical applications field.
This Bayesian network
models conditional
dependencies for an
example concerning
smokers (S),
tendencies to develop
cancer (C) and heart
disease (H), together
with variables
corresponding to heart
(H1, H2) and cancer
(C1, C2) medical tests.
72
Once a DAG has been constructed, the joint
probability can be obtained by multiplying the
marginal (root nodes) and the conditional (non-root
nodes) probabilities.
Training: Once a topology is given, probabilities are
estimated via the training data set. There are also
methods that learn the topology.
Probability Inference: This is the most common task
that Bayesian networks help us to solve efficiently.
Given the values of some of the variables in the
graph, known as evidence, the goal is to compute
the conditional probabilities for some of the other
variables, given the evidence.
73
Example: Consider the Bayesian network of the
figure:
a) If x is measured to be x=1 (x1), compute
P(w=0|x=1) [P(w0|x1)].
b) If w is measured to be w=1 (w1) compute
P(x=0|w=1) [ P(x0|w1)].
74
For a), a set of calculations are required that
propagate from node x to node w. It turns out that
P(w0|x1) = 0.63.
For b), the propagation is reversed in direction. It
turns out that P(x0|w1) = 0.4.
In general, the required inference information is
computed via a combined process of “message
passing” among the nodes of the DAG.
Complexity:
For singly connected graphs, message passing
algorithms amount to a complexity linear in the
number of nodes.
75
Bayesian networks and functional graphical models
Pearl, J., Causality: Models,
Reasoning, and Inference 2000:
Cambridge University Press.
76
Homework
Due by beginning of class Tuesday 4/11/17
Read chapter 1&2 of the text
Do text computer experiments 2.7,2.8 PP 85-86
Read sections 1 through 4 of “On The Mathematical
Foundations Of Theoretical Statistics” (posted on course
website)
What is a sufficient statistic for the Gaussian,
Poisson, and exponential distributions? Express the
mean and variance for these distributions in terms of
the sufficient statistic.
Next: chapter 3
77
Instructor Contact Information
Andrew R. Cohen
Associate Prof.
Department of Electrical and Computer Engineering
Drexel University
3120 – 40 Market St., Suite 110
Philadelphia, PA 19104
office phone: (215) 571 – 4358
http://bioimage.coe.drexel.edu/courses
[email protected]