Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
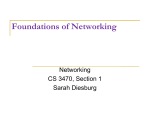
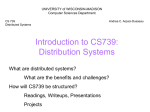
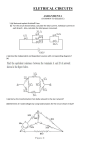
COMPUTATIONAL METHODS IN ENGINEERING AND SCIENCE EPMESC X, Aug. 21-23, 2006, Sanya, Hainan, China ©2006 Tsinghua University Press & Springer Error Estimations in LBIEM and Other Meshless Methods H. B. Chen 1*, D. J. Fu 1, X. F. Guo 2, P. Q. Zhang 1 1 2 CAS Key Laboratory of Mechanical Behavior and Design of Materials, Department of Modern Mechanics, University of Science and Technology of China, Hefei, Anhui, 230027 China Teaching and Research Section of Mechanics, Dalian Jiaotong University, Dalian, Liaoning, 116028 China Email: [email protected] Abstract: Error estimation relates to the reliability of algorithms and improvement of computational efficiencies, which is also the significant component in the numerical algorithms. In the current paper, the developments of error estimation in meshless methods are firstly reviewed, and some schemes to define the a-posteriori error estimators, are quoted in detail. Then, based on the relevant ideas of FEM and the other meshless methods, the dual error indicators are introduced for the local boundary integral equation method (LBIEM). The new error indicators are defined by the differences of three sets of solutions. These solutions come from normal LBIEM solution, Taylor expansion and a reanalysis of the LBIEM. Numerical tests show that the new error estimators are simple but efficient. INTRODUCTION Error estimation in numerical computations is obviously as old as the numerical computations themselves [1], which relates to the reliability of algorithms and improvement of computational efficiencies, while especially the a-posteriori one is also the crucial component in the sequent adaptivity procedure. As a result, large amounts of relevant research has been developed in numerical methods, for instance, the most classes of error estimators are residue-based and recovery-based in FEM [2-4]. In meshless methods, nodes can be easily moved, added and deleted because the trial functions are based on regularly or arbitrarily distributed nodes in the domain, which leads to more convenient and attractive to implement adaptivity processes. According to published literatures of meshless methods, such as element-free Galerkin method (EFGM), reproducing kernel particle method (RKPM), hp-clouds method, least-squares meshfree method (LSMFM),boundary node method (BNM), generalized finite element method (GFEM),etc, some investigations have been performed to find the reliable error estimations [5-18]. Particularly for the a-posterior error estimator, large efforts have been devoted to seeking for difference between original solutions and referenced solutions because exact solutions are generally unavailable. Referenced solutions can be obtained by some schemes based on the characters of meshless methods. Then, a-posterior error estimators can be defined by the difference, and efficiently indicates the error between numerical solutions and the real ones. In the current paper, the developments of error estimation in meshless methods are firstly reviewed. Some schemes to define the a-posteriori error estimators are quoted in detail. For instance, in EFGM, the stress projection technology, the strain gradient method, the cell energy method, recovery based estimation technology, etc, are respectively adapted to obtain the referenced solutions. Then, found on the relevant ideas of FEM and other meshless methods, the dual error indicators defined by the differences of three sets of solution are introduced for the local boundary integral equation method [5]. When the two defined error indicators are consistent with each other, the nodal arrangement with new additional nodes is well-distributed; otherwise, modulate the location and number of the new additional nodes. The following discussion begins with the detailed description of error estimation in meshless methods in section 2. The classic LBIEM and the regularized one are simply presented in section 3. Section 4 focuses on the dual error indicators. Two numerical examples are tested in section 5. The article ends with some conclusions and discussions in section 6. ERROR ESTIMATION SCHEMES IN MESHLESS METHODS To conduct an a-posteriori error estimation for a meshless method, researchers have developed some schemes based on the ideas in current numerical methods and the characters of various meshless methods. As the stress field generated by meshless methods is already very smooth and traditional error estimates based on stress smoothing techniques for ⎯ 800 ⎯ FEMs are not applicable, residue-based and recovery-based error estimation technology in FEM should be applied to meshless method selectively while characters of meshless methods should also be considered. (1) For the EFGM, investigations on error estimations are furnished more than other meshless methods. Early in 1995, Chung and Belytschko [6] adapted the FEM stress projection technique for error analysis in EFGM by computing the projected stresses from the original stresses using moving least square approximation with a reduced domain of influence. The energy norm of the difference between the projected stress and the computed stress is then used as an estimate of the error. Combe and Korn [7] derived the interpolation errors of function and its first-order derivative based on the Taylor expansion of the field variables in the adjacent node. Gavete et al. [8, 9] as well as Lou and Pan [10] use as an a-posteriori error estimator the energy norm of the difference between two approaches: the one used in the EFG method to calculate gradients and the other one calculated by MLS using Taylor series expansion around the point together with the four quadrant criteria to choose the neighbourhood points. Gavete et al. [11, 12] also presented two simple but effective schemes to define a-posteriori error: one made good use of the different radii of influence to obtain the error approximate, another well utilized difference between the tessellation of the gradients calculated by the closest node to the integration points and the EFGM solutions. Liu and Tu [13] used the difference between the two energy values is used as the basic measure of error estimation to define the error estimation, which can be obtained by different integration schemes. Rossi and Alves [14] incorporated the distributed residual error and the prescribed traction residual error into projection technology and obtained the recovery stress, which was applied to the modified EFGM. (2) For the h-p cloud method, Duarte and Oden [15] derived an error estimate that involves only the computation of interior residuals and the residuals for Neumann boundary conditions. (3) RKPM possesses special advantage of multi-scale analysis, therefore, the domain of high stress gradient can be readily detected and it gives rise to a straightforward adaptivity procedure. Liu et al. [16] and Zhang et al. [17] developed adaptive algorithms based on the advantage of multiple scale analysis in RKPM. (4) The residual can be effectively used in computing the error indicator since it is readily computed at each evaluation point employing least-squares formulations. Based on the residual, Park et al. [18] derived the error a-posteriori estimates and error indicators of first-order least-squares meshfree method and applied them to the adaptivity analysis. (5) BNM is the boundary-type meshless method, and rooting in the Boundary Integral Equation (BIE). The residule of hypersingular BIEs can be used the a-posteriori error estimation. Chati et al. [19] applied the hypersingular residual for error estimation to the BNM and presented an effectively adaptive refinement procedure. (6) Based on the development of residue error estimation in FEM and h-p cloud method, Strouboulis et al. [20] addressed a-posteriori error estimates of Neumann problems in GFEM. Further, more assessment of these error estimates and contrast to patch recovery error estimator were also performed. REGULARIZED RLBIEM The potential boundary value problem can be addressed as follows ⎧ ⎪ ∇ 2u (x) = p (x) ⎪ ⎨u = u ⎪ ∂u ⎪q = =q ∂n ⎩ x∈Ω (1) on Γ u on Γ q Figure 1: Local boundaries, the supports of nodes and the domain of definition of the MLSA ⎯ 801 ⎯ where u is the potential function according to the acoustic pressure of sound field Ω that is enclosed by Γ = Γ u U Γ q . Here u is prescribed potential on Dirichlet boundary Γu and q is prescribed normal flux on Neumann boundary Γ q , and n is outward normal direction to the boundary, as shown in Fig. 1. The test function modified with companion solution, u ** = u * - u ' = r 1 ln 0 2π r (2) is employed here. By the weighted residual technique and integration by parts, global or local boundary integral equations can be obtained. We give the LBIEs without derivation for simplicity u (y ) = − ∫ ∂ΩS ∂u ** (x, y ) u (x)d Τ − ∫ u ** (x, y ) p (x)d Ω s ΩS ∂n (3) for source point inside the Ω , and α (y )u (y ) = ∫ ∂Ω s u ** (x, y ) ∂u (x) ∂u ** (x, y ) dΤ − ∫ u (x)d Γ − ∫ u ** (x, y ) p (x)d Ω ∂Ω s Ωs ∂n ∂n (4) for source point on the global boundary Γ . Derived from the knowledge of classic BEM, the following expression holds α (y )u (y ) = ∫ LS +Γ S ∂u ** (x, y ) u (y )d Γ ∂n (5) Subtracting Eq. (4) from Eq. (5), we have 0 = ∫ u ** (x, y ) Γs ∂u (x) ∂u ** (x, y ) dΤ − ∫ (u (x) − u (y ))d Γ − ∫ u ** (x, y ) p (x)d Ω LS +Γ s ΩS ∂n ∂n Eq. (6) is called regularized LBIE, and here (6) ∂u ** (x, y ) = o(r −1 ) and (u (x) − u ( y ) = o(r ) as x → y , thus, the singularity ∂n in Eq. (6) can be eliminated. Eqs. (3, 4) are the LBIE in the implementation of classic LBIEM while Eqs. (3, 6) are those of regularized LBIEM. DUAL ERROR INDICATORS IN THE LBIEM When adding a new node in the procedure of nodal distribution refinement, the new node is put at the middle of two original nodes. Consider three set solutions: the first calculated by normal MLS through the fictitious potentials of the original nodes; the second obtained by MLS using Taylor series expansion, but only for the newly added nodes; and the third calculated by MLS through the fictitious potentials of the original and newly added nodes together, after a reanalysis has been performed. The dual error indicators defined by the differences of the three sets of solution are introduced for the LBIEM. In order to calculate the second solution, a Taylor expansion around point P( xi , yi ) can be expressed in the form u = ui + h ∂ui ∂u + k i + o( ρ 2 ) ∂x ∂y (7) where u = u ( x, y ) , ui = u ( xi , yi ) , h = x − xi , k = y − yi , ρ = h 2 + k 2 . Consider norm B Ni ∂u ∂u r r B = ∑ wI ( x − xI )[ui + hI i + k I i − uI ]2 ∂x ∂y I =1 (8) where the Ni points are those nodes close to the evaluation point P ( xi , yi ) , and hI = xI − xi , k I = yI − yi . In this paper, N i = N 2 when N is an even number and N i = ( N − 1) 2 when N is an odd number, where N is the total node number of a discretization. The solution may be obtained by minimizing norm B ⎯ 802 ⎯ ∂B =0 ∂{Du} (9) where ⎡ ∂u ∂u ⎤ {Du}T = ⎢ui , i , i ⎥ ⎣ ∂x ∂y ⎦ (10) The expansion of Eq. (9) is ⎡ ∑ wI ⎢ ⎢ ∑ wI hI ⎢ ∑ wI k I ⎣ ∑w h ∑w h ∑w h k I I 2 I I I I I ⎧ ⎫ ⎪u ⎪ ∑ wI kI ⎤⎥ ⎪⎪ ∂ui ⎪⎪ ⎪⎧ ∑ uI wI ⎪⎫ ∑ wI hI kI ⎥ ⎨ ∂xi ⎬ = ⎨∑ uI wI hI ⎬ ∑ wI kI2 ⎥⎦ ⎪⎪ ∂ui ⎪⎪ ⎩⎪∑ uI wI kI ⎭⎪ ⎪ ⎪ ⎩ ∂y ⎭ (11) Ni where ∑ is the abbreviation of ∑ I =1 . The dual error indicators for the meshless LBIEM are preliminarily proposed here. The quality of the initial nodal arrangement should be tested firstly. Add new nodes in the sparse area and then judge whether to redistribute the nodes. When an adaptive nodal distribution refinement is implemented, new additional nodes are advised to locate at the middle points on the lines between two neighbor nodes for internal region and also at the middle points of the boundary contours between two neighbor boundary nodes. The way of so adding new nodes, not only is easy to implement, but also can judge whether to add a new node or not. NUMERICAL TESTS The relative errors in the numerical examples are defined as εi = ui( numerical ) − ui( exact ) 1 N N ∑u j =1 ×100% (13) ( exact ) j where i denotes the evaluation point and N is the total node number of a discretization. 1. Example 1 Consider a plane potential flow around a cylinder of radius a in an infinite domain, shown in Fig. 2. Because of symmetry, only one quarter of the domain needs to be analyzed. Fig.3 shows the model with boundary conditions and the initial nodal arrangement with 19 nodes (16 boundary nodes and 3 internal nodes). The exact solution can be expressed as u = V∞ y[1 − a2 1 ] = y[1 − ] 2 2 ( x − L) + y ( x − 4) 2 + y 2 where u represents the flow function, V∞ is the horizontal flow velocity at infinite distance, (L, 0) is the location of the cylinder. Figs. 4 and 5 are the nodal arrangements with 15 and 8 additional points, respectively. Figs. 6 and 7 show the error comparisons of these two nodal arrangements. Figure 2: Flow around a cylinder in an infinite field ⎯ 803 ⎯ Figure 3: The model with boundary conditions and its initial discretization with 19 nodes Figure 4: Nodal arrangement with 15 additional nodes Figure 5: Nodal arrangement with 8 additional nodes 13 Original Taylor Refresh 12 11 10 Potential Error (%) 9 8 7 6 5 4 3 2 1 0 -1 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 Node Figure 6: Error comparison with 15 additional nodes Figure 7: Error comparison with 8 additional nodes 2. Example 2 This example analyzes the potential problem in an L-shaped domain with mixed boundary conditions, as shown in Fig.8. The analytical solution is u (r ,θ ) = r 2 3 sin(2θ / 3) where r and θ are the polar coordinates. There is a singular point at the reentrant corner o for potential derivatives. The initial nodal arrangement was discretized with 21 nodes including 16 boundary nodes and 5 internal nodes, as also shown in Fig.8. Two nodal arrangements with additional 10 and 18 points can be seen in Figs. 9 and 10, respectively. Figs. 11 and 12 present the error comparisons of these two nodal arrangements. The above two examples illuminate that: For the newly added nodes, the “Taylor” errors are always lower than their “Original” ones. When the newly added nodes and the original ones are combined together and the LBIE formulation is solved again, the magnitude of the solution error, i.e. the “Refresh” error, depends on the quality of the new nodal distribution. Compared with the “Original” errors, when the new nodal distribution is good, the “Refresh” errors reduce obviously; on the other hand, when the distribution is not desirable, the “Refresh” errors are generally unstable and their maximum error may surpass the “Original” one. In the well-distributed arrangements, the “Refresh” errors are similar to the “Taylor” ones at the newly added nodes. When these two error indicators are consistent with each other, the nodal arrangement with new additional points is well-distributed; otherwise, modulate the location and number of the new additional nodes. ⎯ 804 ⎯ Figure 8: An L-shaped domain with reentrant corner singularity and its initial discretization with 21 nodes Figure 9: Nodal arrangement with 10 additional nodes Figure 10: Nodal arrangement with 18 additional nodes 45 Original Taylor Refresh 40 35 Potential Error (%) Potential Error (%) 30 25 20 15 10 5 0 -5 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 36 34 32 30 28 26 24 22 20 18 16 14 12 10 8 6 4 2 0 -2 Original Taylor Refresh 0 Node 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 Node Figure 11: Error comparison with 10 additional nodes Figure 12: Error comparison with 18 additional nodes CONCLUSIONS AND DISCUSSIONS As the local boundary integral equation method has some special characteristics, i.e.,the local effects of local boundary integral equations. After analyzing the three sets of relative errors in detail, a dual error indicators algorithm is proposed in this paper. So far as we learn from the literature, this work is the first research on the LBIEM error estimation, and it is novel in the field of error estimation and adaptive mesh refinement research. The aim to solve the LBIEs again in the new nodal distribution is to check the effect of the new additional points on the next-solving results and is to make sure that the new nodal arrangement would be well-distributed. To implement the dual error indicators algorithm to a general problem with no exact solution, three sets of solution should be defined as: the first solutions including new additional points calculated by MLS through the original nodal fictitious values; and then the second solutions for new additional points calculated by MLS using Taylor series ⎯ 805 ⎯ expansion; at last, the third solutions calculated by MLS through the new nodal fictitious values after a reanalysis of the LBIEs is performed for the original and newly added nodes together. One error indicator is defined by the first two solutions, but because it is uncertain whether the new nodal arrangement would be well-distributed, another error indicator is defined by the first and the third solutions to judge the quality of the former one. When these two error indicators are consistent with each other, the nodal arrangement with new additional points is well-distributed; otherwise, modulate the location and number of the new additional nodes. It should be stressed that the research and discussions on the error indicator and adaptive refinement for the meshless LBIEM in this paper are preliminary, and many problems should be further investigated. For instance, the present numerical experiments can only illustrate the necessity of using two error indicators at the same time, how to define the two residual properly and to develop an effective refinement procedure for the nodal distribution require more investigations. Furthermore, the examples in this paper belong to h-refinement, how to apply the present idea to p- and r-refinements requires further research. However, the initial work here holds significant possibilities for the future of adaptive numerical analysis for the LBIEM and the other meshless algorithms. REFERENCES 1. Zienkiewicz OC. The background of error estimation and adaptivity in finite element computations. Comput. Meth. Appl. Mech. Eng., 2006; 195: 207-213. 2. Babuska I, Rheinboldt WC. A-posteriori error estimates for the finite element method. Int. J. Numer. Methods Eng., 1978; 12: 1579-1615. 3. Zienkiewicz OC, Zhu JZ. A simple error estimator and adaptive procedure for practical engineering analysis. Int. J. Numer. Methods Eng., 1987; 24: 337-357. 4. Zienkiewicz OC, Borromand B, Zhu JZ. Recovery procedures in error estimation and adaptivity, part I: adaptivity in linear problems. Comput. Meth. Appl. Mech. Eng., 1999; 176: 111-125. 5. Guo XF, Chen HB. Dual error indicators for the local boundary integral equation method in 2D potential problems. Eng. Anal. Bound. Elem., (in press). 6. Chung HJ, Belytschko T. An error estimate in the EFG method. Comput. Mech., 1998; 21(2): 91-100. 7. Haussler-Combe U, Korn C. An adaptive approach with the Element-Free-Galerkin method. Comput. Meth. Appl. Mech. Eng., 1998; 162: 203-222. 8. Gavete L, Cuesta JL, Ruiz A. A procedure for approximation of the error in the EFG method. Int. J. Numer. Methods Eng., 2002; 53(3): 677-690. 9. Gavete L, Cuesta JL, Ruiz A. A numerical comparison of two different approximations of the error in a meshless method. Eur. J. Mech. A-Solids, 2002; 21(6): 1037-1054. 10. Lou LL, Pan Z. Adaptive meshless method based on local fit technology. Acta Mech. Solida Sin., 2005; 18(2): 164-172. 11. Gavete L, Falcon S, Ruiz A. An error indicator for the element free Galerkin method. Eur. J. Mech. A-Solids, 2001; 20(2): 327-341. 12. Gavete L, Gavete ML, Alonso B et al. A posteriori error approximation in EFG method. Int. J. Numer. Methods Eng., 2003; 58(15): 2239-2263. 13. Liu GR, Tu ZH. An adaptive procedure based on background cells for meshless methods. Comput. Meth. Appl. Mech. Eng., 2002; 191: 1923-1943. 14. Rossi R, Alves MK. Recovery based error estimation and adaptivity applied to a modified element-free Galerkin method. Comput. Mech., 2004; 33(3): 194-205. 15. Duarte CA, Oden JT. An h-p adaptive method using clouds. Comput. Meth. Appl. Mech. Eng., 139: 237-262. 16. Liu WK, Chen YJ, Uras RA et al. Generalized multiple scale reproducing kernel particle methods. Comput. Meth. Appl. Mech. Eng., 1996; 139: 91-157. 17. Zhang ZQ, Zhong JX et al. h-adaptivity analysis based on multiple scale reproducing kernel particle method. Applied Mathematics and Mechanics, 2005; 26(8): 972-978 (in Chinese). 18. Park SH, Kwon KC, Youn SK. A posteriori error estimates and an adaptive scheme of least-squares meshfree method. Int. J. Numer. Methods Eng., 58(8): 1213-1250. ⎯ 806 ⎯ 19. Chati MK, Paulino GH, Mukherjee S. The meshless standard and hypersingular boundary node methodsapplications to error estimation and adaptivity in three-dimensional problems. Int. J. Numer. Methods Eng., 2001; 50(9): 2233-2269. 20. Strouboulis T, Zhang L, Wang D et al. A posteriori error estimation for generalized finite element methods. Comput. Meth. Appl. Mech. Eng., 2006; 195: 852-879. ⎯ 807 ⎯