Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power dividers and directional couplers wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Oscilloscope history wikipedia , lookup
Surge protector wikipedia , lookup
Integrated circuit wikipedia , lookup
Negative resistance wikipedia , lookup
Integrating ADC wikipedia , lookup
Radio transmitter design wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Index of electronics articles wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Power electronics wikipedia , lookup
Power MOSFET wikipedia , lookup
Current source wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Regenerative circuit wikipedia , lookup
RLC circuit wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Wilson current mirror wikipedia , lookup
Negative-feedback amplifier wikipedia , lookup
Schmitt trigger wikipedia , lookup
Two-port network wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Current mirror wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Operational amplifier wikipedia , lookup
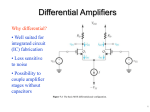
Differential Amplifiers/Demo Motivation and Introduction The differential amplifier is among the most important circuit inventions, dating back to the vacuum tube era. Offering many useful properties, differential operation has become the dominant choice in today's high-performance analog and mixed-signal circuits. This chapter deals with the analysis and design of CMOS differential amplifiers. Following a review of single-ended and differential operations, we describe the basic differential pair, and analyze both the large-signal and the small-signal behavior. Next, we introduce the concept of common-mode rejection and formulate it for differential amplifiers. Finally we study differential pairs with diode-connected and current-source loads as well as differential cascode stages. Prerequisites Concept of amplification, MOS physics, small signal and large signal models. Learning Outcome Knowledge of Various types of differential amplifier. Characteristics of Differential Amplifiers Applications of Differential amplifiers Ability to decide Which Differential Amplifier. Designing out of specifications Ability to draw and understand the characteristics Suggested Time 10 hours Single Ended and Differential Operation Differential Operation Definitions A single-ended signal is defined as one that is measured with respect to a fixed potential, usually the ground. A differential signal is defined as one that is measured between two nodes that have equal and opposite signal excursions around a fixed potential. In the strict sense, the two nodes must also exhibit equal impedance to that potential. Figure 1 illustrates the two types of signals conceptually. The "center" potential in differential signalling is called the "common-mode"(CM) level. Figure 1. Single-Ended Signal (left) Differential Signal (Right) Advantages of Differential Operation over Single-ended An important advantage of differential operation over single-ended signaling is higher immunity to "environmental" noise. Consider the example depicted in Figure 2, where two adjacent lines in a circuit carry a small, sensitive signal and a large clock waveform. Due to capacitive coupling between the lines, transitions on lineL2 corrupt the signal on line L1. Now suppose as shown in figure 2(b), the sensitive signal is distributed as two equal and opposite phases. if the clock line is placed mid-way between the two, the transitions disturb the differential phases by equal amounts, leaving the difference intact. Since the common-mode level of the two phases is disturbed but the differential output is not corrupted, we say this arrangement "rejects" commonmode noise. Figure 2(a) Corruption of a signal due to coupling (b) Reduction of coupling by differential operations Thus far, we have seen the importance of employing differential paths for sensitive signals. It is also beneficial to employ differential distribution for noisy lines. Another useful property of differential signaling is the increase in maximum achievable voltage swings. Other advantages of differential circuits over single-ended counterparts include simpler biasing and higher linearity. Animation Corrsigdiff.swf (For your convenience you can get them inside Self Learning Quadrant) Drawbacks of Differential Operation The differential circuits occupy twice as much as area as single-ended alternative. But in practice this is a minor drawback, Also, the suppression of non-ideal effects by differential operation often results in a smaller area than that of a brute-force single-ended design. Furthermore, the numerous advantages of differential operation by far outweigh the possible increase in area. Basic Differential Pair Introduction How do we amplify a differential signal? As suggested by the observations in the previous section, we may incorporate two identical single-ended signal paths to process the two phases(Figure 1). Such a circuit indeed offers some of the advantages of differential signaling: high rejection of supply noise, higher output swings etc. But what happens if Vin1 and Vin2 experience a large common-mode disturbance or simply do not have a well defined common-mode dc level? As the input CM level, Vin,CM changes, so do the bias currents of M1 and M2, thus varying both the transconductance of the devices and the output CM level. The variation of the transconductance in turn leads to a change in the small-signal gain while the departure of the output CM level from its ideal value lowers the maximum allowable output swings. For example, as shown in Figure 1, if the input CM level is excessively low, the minimum values of Vin1 and Vin2 may in fact turn off M1and M2, leading to severe clipping at the output. Thus, it is important that the bias currents of the devices have minimal dependence on the input CM level. Figure 1(a) Simple Differential Circuit (b) illustration of sensitivity to the input common-mode level. A simple modification can resolve the above issue. SHown in Figure 2, the "differential pair" employs a current source ISS to make ID1+ID2 independent of Vin,CM. Thus, if , the bias current of each transistor equals and the output common-mode level is . It is instructive to study the large-signal behavior of the circuit for both differential and common-mode input variations. Figure 2. Basic Differential Pair Qualitative Analysis Let us assume that in Figure 2, varies from - to + . If Vin1 is much more negative than Vin2, M1 is off, M2 is on, and . Thus, and . As Vin1 is brought closer to Vin2, M1 gradually turns on, drawing a fraction of ISS from RD1 and hence lowering Vout1. Since , the drain current of M2 decreases and Vout2 rises. As shown in Figure 3(a), for Vin1 = Vin2, we have . As Vin1 becomes more positive than Vin2, M1 carries a greater current than does M2 and Vout1 drops belowVout2. For sufficiently large Vin1 - Vin2, M1 "hogs" all of ISS, turning M2 off. As a result, and . Figure 3 also plots versus . Figure 3.Input-output characteristics of a differential Pair The foregoing analysis reveals two important attributes of the differential pair. First, the maximum and minimum levels at the output are well-defined and independent of the input CM level. Second, the small-signal gain is maximum for Vin1 = Vin2, gradually falling to zero as |Vin1 - Vin2| increases. In other words, the circuit becomes more nonlinear as the input voltage swing increases. For Vin1 = Vin2, we say that the circuit is in equilibrium. Now it us consider the common-mode behavior of the circuit. As mentioned earlier, the role of the tail current source is to suppress the effect of input CM level variations on the operation of M1 and M2 and the output level. Does this mean that Vin,CM can assume arbitrarily low or high values? To answer this question, we set Vin1=Vin2=Vin,CM and vary Vin,CM from 0 to VDD. Figure 4(a) shows the circuit with ISS implemented by an NFET. Note that the symmetry of the pair requires that Vout1=Mout2 Figure 4.(a)Differential pair sensing an input common-mode change (b)equivalent circuit if M3 operates in deep triode region (c)commonmode input-output characteristics What happens if Vin,CM=0? Since the gate potential of M1 and M2 is not more positive than their source potential, both devices are off, yielding ID3 = 0. This indicates that M3 is in deep triode region because Vb is high enough to create an inversion layer in the transistor. With ID1=ID2 = 0, the circuit is incapable of signal amplification, and Vout1=Vout2=VDD. Now suppose Vin,CM becomes more positive. Modelling M3 by a resistor as in Figure 4(b), we note that M1 and M2 turn on ifVin,CM VTH. Beyond this point, ID1 and ID2 continue to increase and VP also rises. In a sense, M1 and M2 constitute a source follower, forcing VP to trackVin,CM. For a sufficiently high Vin,CM, the drain-source voltage of M3 exceeds VGS3-VTH3, allowing the device to operate in saturation. The total current through M1and M2 then remains constant. We conclude that for proper operation Vin,CM VGS1+ (VGS3-VTH3). What happens if Vin,CM rises further? Since Vout1 and Vout2 are relatively constant, expect that M1 and M2 enter the triode region if Vin,CM > Vout1 + VTH = VDD-RDISS/2 + VTH. This sets an upper limit on the input CM level. In summary, the allowable value of Vin,CM is bounded as follows: . With our understanding of differential and common-mode behavior of the differential pair, we can now answer another important question: How large can the output voltage swings of a differential pair be? As illustrated in Figure 5, for M1 and M2 to be saturated, each output can go as high as VDD but as low as approximatelyVin,CM-VTH. In other words, the higher the input CM level, the smaller the allowable output swings. For this reason, it is desirable to choose a relatively low Vin,CM, but the preceding stage may not provide such a level easily. An interesting trade-off exists in the circuit of Figure 5 between the maximum value of Vin,CM and the differential gain. Similar to a simple common-source stage the gain of a differential pair is a function of the dc drop across the load resistors. Thus, if RDISS/2 is large, Vin,CM must remain close to ground potential. Figure 5.Maximum allowable output swings in a differential pair Quantitative Analysis We now quantify the behavior of MOS differential pair as a function of the input differential voltage. We begin with the large-signal analysis to arrive at an expression for the plots shown in Figure 3. Figure 6.Differential pair For the differential pair in figure 6, we have Vout1 = VDD RD1ID1 and Vout2 = VDD - RD2ID2, i.e., Vout1 - Vout2 = RD2ID2 - RD1ID1 = RD(ID2 ID1) ifRD1=RD2=RD.Thus, we simply calculate ID2 and ID2 in terms of Vin1 and Vin2, assuming the circuit is symmetric, M1 and M2 are saturated, and . Since the voltage at node P is equal to Vin1 VGS1 and Vin2-VGS2. ..............(1). For a square-law device, we have: ...............(2) and, therefore, ..............(3) It follows from (1) and (2) that ................(4) Our objective is to calculate the differential output current, ID1 - ID2. Squaring the two sides of (4) and recognizing that ID1 + D2 = ISS, we obtain ..............(5) That is, .............(6) Squaring the two sides again and noting that 4ID1ID2 = (ID1 + ID2)2 - (ID1 2 2 2 D2) = ISS - (ID1 - ID2) , we arrive at ...............(7) Thus, .............(8) As expected, ID1-ID2 is an odd function of Vin1 - Vin2, falling to zero for Vin1 = Vin2. As |Vin1 - Vin2| increases from zero , |ID1 - ID2| also increases because the factor preceding the square root rises more rapidly than the argument in the square root drops. Before examining (8) further, it is instructive to calculate the slope of the characteristic i.e. the equivalent Gm of M1 and M2. Denoting ID1 ID2 and Vin1 - Vin2 by and , respectively, the reader can show that. ...............(9) For . Moreover, since , we can write the small-signal differential voltage gain of the circuit in the equilibrium condition as ................(10) Equation (9) also suggests that Gm falls to zero for ..........(11) As we will see below, this value of plays an important role in operation of the circuit. Let us now examine Equation (8) more closely. It appears that the argument in the square root drops to zero for , implying that crosses zero at two different values of . This was not predicted in our qualitative analysis in Figure 3. This conclusion, however, is incorrect. To understand why, recall that (8) was derived with the assumption that both M1 and M2 are on. In reality, as exceeds a limit, one transistor carries the entire ISS, turning off the other. Denoting this value by , we have and because M2 is nearly off. It follows that ............(12) For is off and (8) does not hold. As mentioned above, Gm falls to zero for . Figure 7 plots the behavior. Figure 7. Variation of drain currents and overall transconductance of a differential pair versus input voltage The value of given by (12) in essence represents the maximum differential input that the circuit can "handle". It is possible to relate to the overdrive voltage of M1 and M2 in equilibrium. For a zero differential input, , and hence .............(13) Thus, the equilibrium overdrive is equal to . The point is that increasing to make the circuit more linear inevitably increases the overdrive voltage of M1 and M2. For a given ISS, this is accomplished only by reducing W/L and hence the transconductance of the transistors. SMALL SIGNAL ANALYSIS In the above figure, assuming M1 and M2 are saturated, Applying small signals Vin1 and Vin2 to the two inputs, To arrive at some result, we proceed by small signal analysis. Assume RD1 = RD2 = RD As the circuit is driven by two independent signals, The output will be a reult of superposition of these two signal. Set Vin2 = 0 an find the effect of Vin1 at X and Y. M1 forms a commonsource stage with a degeneration resistance equal to the impedance seen looking into the source M2. Neglecting channel-length and body effect, Therefore, To calculate VY , replace M1 by a thevnin equivalent circuit, where thevnn voltage VT = Vin1 and thevnin resistance RT = 1/gm1 as shown in figure below. With M2 operating as a common gate stage, we get gain equal to For gm1 = gm2 = gm , we get Similarly On superposition, we have Differential gain equal to If the output is single ended i.e the output is sensed between X or Y and ground, so the differential gain is halved. Common Mode Response Introduction An important attribute of differential amplifiers is their ability to suppress the effect of common mode perturbations. In reality, neither is the circuit fully symmetric nor does the current source exhibits an infinite output impedance. As a result, a fraction of the input CM variation appears at the output. Symmetric Circuit Assuming that circuit is symmetric but the current source has finite output impedance,RSS[Figure 1(a)]. As Vin,CM changes, so does VP, thereby increasing the drain currents of M1 and M2 and lowering both VX and VY. Owing to the symmetry, VX remains equal to VY and, as depicted in Figure 1(b), the two nodes can be shorted together. Since M1 and M2 are now "in parallel", i.e. they share all of their respective terminals, the circuit can be reduced to that in Figure 1(c). Note that the compound device, M1 + M2, has twice the width and the bias current of each of M1 and M2 and, therefore twice their transconductance. The CM gain of the circuit is thus equal to .............(1) .............(2) where gm denotes the transconductance of each of M1 and M2 and . In a symmetric circuit, input Cm variations disturb the bias points, altering the small-signal gain and possibly limiting the output voltage swings. Figure 1. (a) Differential pair sensing CM input, (b) simplified version of (a),(c) equivalent circuit of (b) The foregoing discussion indicates thatthe finite output impedance of the tail current source results in some common-mode gain in a symmetric differential pair. Nonetheless, this is usually a minor concern. More troublesome is the variation of the differential output as a result of a change in Vin,CM an effect that occurs because in reality the circuit is not fully symmetric, i.e., the two sides suffer from slight mis- matches during manufacturing. For example in Figure 1(a) RD1 may not be exactly equal to RD2. Asymmetric Circuit If circuit is asymmetric and the tail current source suffers from a finite output impedance the effect of input common mode variation is different from symmetric case. Suppose as shown in Figure 2. RD1 = RD and , where denotes a small mismatch and the circuit is otherwise symmetric. What happens to VX and VY as Vin,CM increases? Since M1 and M2 are identical, ID1 and ID2 increase by , but VX and VYchange by different amounts: ............(3) ............(4) Figure 2. Common mode response in the presence of resistor mismatch Thus, a common-mode change at the input introduces a differential component at the output. We say the circuit exhibits common-mode to differential conversion. This is a critical problem because if the input of a differential pair includes both a differential signal and common mode noise the circuit corrupts the amplified differential signal by the input CM change. The effect is illustrated in Figure 3. Figure 3. Effect of CM noise in the presence of resistor mismatch Nut shell The common-mode response of the differential pairs depends on the output impedance of the tail current source and asymmetries in the circuit, manifesting itself through two effects: variation of the output CM level ( in symmetric case) and conversion of the input commonmode variations to differential components at the output. In analog circuits, the latter effect is much more severe than the former. For this reason, the common-mode response should usually be studied with mismatches taken into account Significance We make two observations. First, as the frequency of the CM disturbance increases, the total capacitance shunting the tail current source introduces larger tail current variations. Thus, even if the output resistance of the current source is high, common-mode to differential conversion becomes significant at high frequencies. Shown in Figure 4, this capacitance arises from the parasitics of the current source itself as well as the source-bulk junctions of M1 and M2. Second, the asymmetry in the circuit stems from both the load resistors and the input transistors, the latter contributing a typically much greater mismatch. Figure 4. CM response with the finite tail capacitance Figure 5(a) Differential pair sensing CM input (b) equivalent citcuit of (a) Let us now study the asymmetry resulting from mismatches between M1 and M2 in Figure 5(a). Owing to dimension and threshold voltage mismatches, the two transistors carry slightly different currents and exhibit unequal transconductances. To calculate the gain from Vin,CM to X and Y, we use the equivalent circuit in Figure 5(b), writing ID1 = gm1(Vin,CM-VP) and ID2=gm2(Vin,CM-VP). That is, ........(5) and ..............(6) We now obtain the output voltages as ..............(7) and ..............(8) The differential component at the output is therefore given by ..............(9) In other words, the circuit converts input CM variations to a differential error by a factor equal to ..............(10) where denotes common-mode to differential-mode conversion and . For meaningful comparison of differential circuits, the undesirable differential component produced by CM variations must be normalized to the wanted differential output resulting from amplification. We define "common-mode rejection ratio"(CMRR) as ..............(11) Differential Pair with MOS loads The load of a differential pair need not be implemented by linear resistors. Differential pairs can employ diode-connected or currentsource loads (Figure 1). The small-signal differential gain can be derived using the half circuit concept. For Figure 1(a), ....................(1) where subscripts N and P denote NMOS and PMOS, respectively. Expressing gmN and gmP in terms of device dimensions, we have .....................(2) For Figure 1(b) we have ....................(3) In the circuit of Figure 1(a), the diode-connected loads consume voltage headroom, thus creating a trade-off between the output voltage swings, the voltage gain, and the input CM range. To achieve a higher gain must decrease, thereby increasing and lowering the CM level at nodes X andY. Figure 1. Differential pair with (a) diode-connected and (b) currentsource loads In order to alleviate the above difficulty, part of bias currents of the input transistors can be provided by PMOS current sources. Illustrated in Figure 2, the idea is to lower the gm of the load devices by reducing their current rather than their aspect ratio. For example, if M5 and M6 carry 80% of the drain current of M1 and M2, thr current through M3 and M4 is reduced by a factor of five. For a given , this translates to a factor of five reduction in transconductance M3 and M4 because the aspect ratio of the devices can be lowered by same factor. Thus, the differential gain is now approximately five times that of the case with no PMOS current sources. Figure 2.Addition of current sources to increase the voltage gain The small-signal gain of the differential pair with current-source loads is relatively low -- in the range of 10 to 20 in submicron technologies. How do we increase the voltage gain? We increase the output impedance of both PMOS and NMOS devices by cascoding, in essence creating a differential version of the cascode stafe. The result is depicted in Figure 3(a). To calculate the gain, we construct a half circuit of Figure 3(b). Figure 3(a) Cascode differential pair (b) half circuit of (a) Thus, ............(4) Cascoding therefore increases the differential gain substantially but at the cost of consuming more voltage headroom. As a final note, we should mention that high gain fully differential amplifiers require a means of defining the output common-mode level. For example, in Figure 1(b), the output common-mode level is not well- defined whereas in Figure 1(a), diode-connected transistors define the output CM level as .