Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
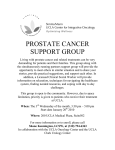
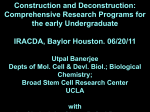
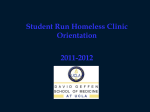
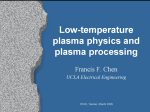
UCLA ENGINEERING Computer Science A SDN-Controlled Underwater MAC and Routing Testbed Ruolin Fan∗, Li Wei† Pengyuan Du*, Ciarán Mc Goldrick♠ and Mario Gerla∗ * University of California Los Angeles, Los Angeles, CA, USA † Michigan Technological University, Houghton, MI, USA ♠ Trinity College Dublin, Dublin, Ireland UCLA ENGINEERING Outline • • • • • • Introduction Background Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING Introduction • Scientific and military operations • Ocean floor mapping • Ancient shipwrecks exploration Computer Science UCLA ENGINEERING Introduction • Search and rescue missions (downed airplanes) Computer Science UCLA ENGINEERING Supervised Search • Man guides search from vessel in real time • Tether support fiber optic communications • Supplies power to USV (Underwater Support Vehicle) and in turns UUVs • Covert operations possible by using optics only for the swarm search Computer Science UCLA ENGINEERING Autonomous search • Non real time search • No man in the loop • Wave actioned generator • Guarantees resupply • Unlimited searches • Several km fronts can be explored with multiple USVs • Video inputs processed on USVs • Results reported to base via satellite Computer Science UCLA ENGINEERING Outline • • • • • • Introduction Background Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING Computer Science Choices for PHY Under Water • Conventional radio waves are absorbed too quickly: not feasible • Acoustic PHY • • • • Long propagation distances (kilometers) Very high latency (speed of sound) Small transmission rates (kbps) Complexity: high latency require different packet collision models • Optic PHY • • • • Short propagation distances (tens of meters) Lower latency (speed of light in water) Fast transmission rates (mbps) Complexity: requires line of sight for transmission UCLA ENGINEERING Computer Science Acoustic vs. Optical Telemetry Method Range Data Rate Efficiency Propagation Speed Acoustic Several km 1 kbps 100 bit/Joule 1500 m/s Optical 100 meter 1 Mbps 30,000 bit/Joule 2.55 * 108 m/s * Farr, N.; Bowen, A.; Ware, J.; Pontbriand, C.; Tivey, M.; , "An integrated, underwater optical /acoustic communications system," OCEANS 2010 IEEE - Sydney , vol., no., pp.1-6, 24-27 May 2010 UCLA ENGINEERING Computer Science Optical or acoustic? • It depends on many things: • • • • Water quality Turbulence Covertness Mobility • Optical needs alignment • Energy availability • May need to support multiple modes on the same UUV, switching from one mode to the next dynamically UCLA ENGINEERING Computer Science Proposal: Underwater SDN • Software defined networking (SDN): separation of control plane with data plane • Allows for flexibility and simplicity • Centralized network controller defines network behavior of other nodes • Control plane: acoustics • Data plane: (mostly) optics, acoustics optional UCLA ENGINEERING Outline • • • • • Introduction Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING General SDN Framework Computer Science UCLA ENGINEERING Computer Science Architecture and Components • SDN components for Software-Defined Mobile Network • SDN controller: The central intelligence of an SDNbased Mobile Cloud • Communicates with UUVs using long-range acoustics • Directs UUV movements in addition to networking • SDN wireless node: The UUVs that explore the ocean • Sends data to the controller mainly using optics • Networks as directed by the controller UCLA ENGINEERING Computer Science The Underwater SDN Architecture Active UUV Recharging UUV Centralized Network Controller Docking Station Sleeping UUVs UCLA ENGINEERING Computer Science Architecture (cont) • SDN wireless node internals Acoustic Local Agent contains recovery mechanisms so that system can still function when communications with SDN controller are lost or disrupted Optic Acoustic UCLA ENGINEERING Computer Science The U/W SDN Control Channel Requirements: • Both positioning and commands • Covert, encrypted, secure.. • One to many – efficient broadcast • Virtual Nets ( different missions) • Network function virtualization UCLA ENGINEERING Computer Science Control Channel Standard - JANUS • The primary advantages: • Simplicity of design • Among the least complicated forms of acoustic communications yet devised. • Robust to noise • This signal should be detected when the signal to noise ratio (SNR) in a given band is at better than -2 dB. • Robust without tracking for “reasonable” amounts of relative speed (range rate). UCLA ENGINEERING Computer Science Control Channel Standard - JANUS • Optimal approach for asynchronous, multi-access (multi-user) applications • Optimal for robustness in the presence of all types of interference, including intentional jamming. • Potentially difficult for third parties • Undetectable by energy detectors • A “constant envelope” waveform • Transmitters not concerned with amplitude crest factors • Allows for maximum power allocation to the transmission. UCLA ENGINEERING Outline • • • • • Introduction Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING Computer Science Testbed Implementation • Parts of the acoustic version of the system implemented in our WaterCom testbed • Small water tank • Lined with foam to attenuate acoustic waves • Compartmentalized with foam to limit connectivity • 6 OFDM acoustic modems • 3 large models with long-range signals • 3 educational models with short-range signals UCLA ENGINEERING Computer Science Testbed Implementation • All modems connected to the WaterCom server • Doubles as the SDN controller • Accessible remotely via <apus.cs.ucla.edu> • Uses the underwater protocol stack SeaLinx • Allows for flexible loading of protocols at different layers UCLA ENGINEERING WaterCom Implementation Computer Science UCLA ENGINEERING Testbed Network Topology Computer Science UCLA ENGINEERING Outline • • • • • Introduction Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING Computer Science Comparing UW MAC Protocols • Using our testbed, we compared 2 existing UW MAC Protocols • Slotted FAMA (S-FAMA) • UW-Aloha • Under-water multi-hop scenario using acoustic radios • 5-minute test cases • Varying packet size • Varying packet sending rates UCLA ENGINEERING Computer Science Experiment Network Topology UCLA ENGINEERING Results: Throughput Computer Science UCLA ENGINEERING Results: Packet Delivery Ratio Computer Science UCLA ENGINEERING Outline • • • • • Introduction Design Testbed Implementation Testbed Usage Conclusion Computer Science UCLA ENGINEERING Computer Science Conclusion • Design of an under-water SDN architecture • Acoustic control plane • (Mostly) optical data plane • Implementation in the WaterCom testbed • Comparison of S-FAMA and UW Aloha • UW Aloha has higher throughput and packet delivery ratio