Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Surface plasmon resonance microscopy wikipedia , lookup
Astronomical spectroscopy wikipedia , lookup
3D optical data storage wikipedia , lookup
X-ray fluorescence wikipedia , lookup
Optical flat wikipedia , lookup
Ultraviolet–visible spectroscopy wikipedia , lookup
Optical coherence tomography wikipedia , lookup
Fourier optics wikipedia , lookup
Nonimaging optics wikipedia , lookup
Nonlinear optics wikipedia , lookup
Interferometry wikipedia , lookup
Harold Hopkins (physicist) wikipedia , lookup
Retroreflector wikipedia , lookup
Wave interference wikipedia , lookup
Optical aberration wikipedia , lookup
Diffraction wikipedia , lookup
Phase-contrast X-ray imaging wikipedia , lookup
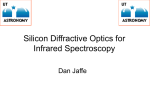
Lateral shearing interferometry for EUV optical testing Ryan Miyakawa1,2, Patrick P. Naulleau2, and Ken Goldberg2 1 Applied Science and Technology Group, UC Berkeley, 2 Lawrence Berkeley National Laboratory Contact: [email protected] SYSTEM ERROR DUE TO GRATING AND DETECTOR TILT WHY LSI? As demands increase for high quality optics in the Extreme Ultraviolet (EUV) and Soft X-ray (SXR) regions for applications in high resolution microscopy and lithography, it is becoming increasingly important to have a reliable means for measuring these optics. In Lateral Shearing Interferometry (LSI), the test wavefront is interfered with a shifted (sheared) copy of itself. The shear at EUV wavelengths is created by a low frequency diffraction grating. LSI is an attractive alternative to other interferometric techniques because of its simple setup and loose requirements on coherence and photon flux. LSI can be thought of as a linear system D that maps a wavefront of N Zernikes to its X and Y derivatives. Since the dimension of the codomain W is twice that of the domain V, the solution wavefront is overspecified. • Improper alignment of the grating or CCD can exacerbate systematic errors. Astigmatism in particular is very sensitive to grating tilt Where Dim{V} = N, and Dim{W} = 2N Since Rank{D} ≤ N, there exists a set F = W \ D{V}, where F = D{V}, such that vectors fi Є F are not mapped by D and thus represent forbidden solutions (solutions that cannot come from a real wavefront). Astigmatism (waves) 0 -0.2 -0.4 We can then define an error function to determine the validity of the data w: -0.6 -0.8 -1 -1.2 -6 -4 -2 0 2 4 Grating tilt angle (mrad) •Object beam diffracts off of diffraction grating • Multiple orders propagate at slightly different angles and interfere on the CCD. • Optical pathlength difference is the function f(x) = W(x+s) – W(x), which approximates the discrete derivative of the wavefront W(x) • Relaxed coherence requirements • Can operate without large amounts of photon flux • Robust against mechanical vibrations D {v} = D: V W Measured astigmatism vs. grating tilt angle • Errors can be determined analytically by treating the grating as a hologram and performing a coordinate transform to the grating coordinates LSI SETUP FOR EUV AND SXR WAVELENGTHS MONITORING ALIGNMENT USING A LINEAR SYSTEMS ANALYSIS 6 If E is non-zero, then the data vector w has a nonzero projection onto F, which means that the system has drifted from proper alignment. This technique allows for a real-time method to asses the health of the LSI system. SYSTEMATIC METHOD TO ALIGN THE LSI SETUP PRECISION OF THE LSI ALIGNMENT Although LSI is sensitive to grating and detector tilt angles, it can leverage this sensitivity to ensure its own proper alignment. The alignment process is briefly outlined: Since LSI is so drastically affected by grating alignment it is important to know how effective the alignment procedure will be in the presence of mechanical uncertainties. The following plots show the relationship between these mechanical uncertainties and the eventual aberrations in the fringes from the resulting calibration errors. For clarity we show only astigmatism, which is the largest systematic error. • Align CCD to be perpendicular to the optical axis by finding the CCD angle that has the highest density of fringes. GRATING DISTORTION TO THE SPHERICAL WAVE CARRIER • Collect interferograms for many (~30) different grating tilt angles and measure the resulting tilt and astigmatism in the fringes. Repeat for at least 3 different grating translations. Spatial frequencies incident upon a periodic grating will diffract based on the grating equation: • Align grating to the tilt of its translation stage axis by noting that aberrations will be independent of grating displacement at this tilt angle Astigmatism error vs. grating tilt precision error fout = fin + mfg Astigmatism (waves) 0.06 Tilt Since spatial frequencies are related to the sin of the angle, the angle of the outgoing wave will experience a different shift for each incoming angle. A complex waveform that is composed of many spatial frequencies will thus not preserve its shape when it is diffracted into a given order. • Plane wave illumination diffracts into plane waves 0.05 0.04 0.03 0.02 0.01 0 0 50 100 150 200 250 300 Grating tilt uncertainty (mrad) • Grating distorts spherical wave illumination in diffracted orders Astigmatism error vs. grating translation parallelism uncertainty • Perform a polynomial fit of tilt and astigmatism as a function of grating tilt angle using the translation stage tilt as the origin: Astigmatism (waves) 0.09 T(θ) = Σci xn, A(θ) = Σdi xn +1 order diffracted spherical wave decomposition: = + astig + + +… 0.08 0.07 0.06 0.05 0.04 0.03 0.02 0.01 0 coma 0 0.1 0.2 0.3 0.4 0.5 Uncertainty in grating translation parallelism (µm) The astigmatism and coma aberrations due to the grating distortion means that the sheared beams are not identical. These errors need to be corrected for when performing the LSI analysis by subtracting out the null interferogram aberrations. • Either match the resulting linear term c1 or d1 of the fit to its analytic model depending on the slope of the model around recovered angle Translation axis 0.6