Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Hunting oscillation wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Work (physics) wikipedia , lookup
Heat transfer physics wikipedia , lookup
Thermodynamic temperature wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Gibbs free energy wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
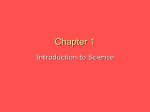
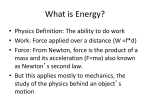
A. La Rosa Lecture Notes PH 213 ________________________________________________________________________ ENERGY CONSERVATION The Fisrt Law of Thermodynamics and the Classical Work Kinetic-Energy (CWE) Theorem I. CONSERVATION of ENERGY Ref: This section taken from The Feynman Lectures Vol. 1, Ch. 4] I.1. What is energy? Illustration of conservation of energy with an analogy: Conservation of blocks I.2. Reversible and non-reversible machines in the context of the gravitational potential energy I.2.A Weight lifting machines and the non-perpetual motion principle I.2.B Ideal Machines and Reversible process I.2.C Comparing reversible and non-reversible machines I.2.D Universal behavior of reversible machines I.2.E Figuring out the actual lift capability of the reversible machine I.2.F The Potential Energy II. CONSERVATION of ENERGY in MULTI-PARTICLES SYSTEMS Ref: This section taken from University Physics, by Ronald Lane Reese, Vol. 1, Ch. 13] II.1 The Classical Work Energy (CWE) Theorem: Case of a single particle II.2 The Classical Work Energy (CWE) Theorem: Case of a multiple particle rigid body II.3 Limitation of the CWE theorem II.4 Generalization of the Classical Work Energy (CWE) theorem: its extension to a thermodynamic system II.4.A Macroscopic and microscopic contributions to the total energy II.4.B The transfer of energy II.4.B1 Macroscopic external work W ’ done on a system II.4.B2 Heat-transfer Q II.4.C Fundamental Energy Conservation Law Generalization of the classic work/kinetic-energy theorem II.5 Case: Pure Thermodynamics The First Law of Thermodynamics 1 I. CONSERVATION of ENERGY [This section taken from The Feynman Lectures Vol. 1 Ch. 4] I.1. What is energy ? Illustration of conservation of energy with an analogy: Conservation of blocks There is a fact or law governing all natural phenomena that are known to date, called the conservation of energy. It states that: There is a certain quantity, which we call energy, that does not change in the manifold changes which nature undergoes It is not a description of a mechanism. It is a mathematical principle It says that it is a numerical quantity that does not change when something happens. A strange fact that we can calculate some numbers and when we finish watching nature go through her tricks and calculate the number again, it is the same. Illustration of conservation of energy with an analogy: Conservation of blocks Little John plays with 28 indestructible blocks. At the beginning of the day, his mother puts him, with his blocks, into a room. At the end of every day, she counts the blocks very carefully, and discovers a law: No matter what little John does with the blocks, there are always 28 remaining. One day she finds only 26. There is consternation. However, when she looks through the window, she finds that 2 blocks lies on the garden. Another day she finds 30! … Later she finds out that a friend came over to visit John and left 2 blocks. She starts enjoying the counting blocks game. But from now on she will close the windows and will not allow extra blocks entering the room. Everything goes all right …until one time she counts only 25. At another occasion, she counts 20. Next day 22, … . What is going on? The mother discovers there is another box where apparently little John place them, but the kid does not allow her to open. Being curious, she invents a scheme: Knowing that each block weights 20 grams, she first weights the full closed box, then subtract the weight of the box (she figures the weight of the box on a day when she sees the 28 blocks), and divides the result by 20 grams. This way she encounters: number of (weight of the box) - 50 grams constant = 28 blocks seen 20 grams 2 But one day, checking again and again the formula throughout the day it appears that it does not to work; the total does not add up to 28. But she notice the dirty water in the bathtub is changing its original height level of 40 cm. It may be that the kid is throwing some blocks at the bath tube (but can not be seen, because the water is dirty. She check that each block raises the level by ½ cm, so she modifies her formula: number of (weight of the box) - 50 grams blocks seen 20 grams (1) height of the water - 40 cm constant (1/2) cm And so on, …. In the complexity of her world she finds a whole series of terms representing ways of calculating how many blocks are in places where she is not allowed to look. As a result she finds, A complex formula ( a quantitity that has to be computed) which always renders the same value. What is the analogy of this to the conservation of energy? The most remarkable aspect that must be abstracted from this picture is that there are no blocks Take away the the first term in expression (1) and we find ourselves calculating more or less abstract things: (weight of the box) - 50 grams 20 grams height of the water - 40 cm constant (1/2) cm (2) The analogy has the following points: When we are calculating the energy, sometimes it leaves the system and goes away, or sometimes some comes in. To verify the conservation, we have to track that we have not put any in nor taking out. The energy has a large number of different forms, and there is a formula for each: gravitational, electrical, radiant energy, … Quoting Feynman,“In physics, today, we have no knowledge of what energy is… however there are formulas for calculating some numerical quantities that when added together gives ’28’__always the same number. It is an abstract thing and does not tell us the mechanism or the reasons for the various formulas ” 3 I.2. Reversible and non-reversible machines in the context of gravitational potential energy Conservation of energy can be understood if we have a formula for all its terms. Here Feynman discusses the formula for the gravitational energy near the surface of the Earth. In Feynman’s description, the point of interest is not necessarily the formula mgh (which we may already know); instead the focus is on the line of reasoning to arrive to such a formula. The line of reasoning is patterned after Mr. Carnot’s arguments on the efficiency of steam engines. We include it in this course also for its direct introduction to the concept of reversible process. I.2.A Weight lifting machines and the non-perpetual motion principle A weight lifting machine: It lifts one weight by lowering another Fig.1 Simple weight-lifting machine Let’s state the following principle: There is no such a thing as perpetual motion (3) with these weight lifting machines (Actually, the no perpetual motion is a general statement of the law of conservation of energy). For the case of lifting-weight machines: If, i) when we have lifted and lowered a lot of weights and ii) restored the machine to the original condition, we find that the net result is to have lifted a weight, then we would have a perpetual motion machine, (because we can use that lifted weight to run something else, which can be repeated again and again.) Accordingly, for the case of weight-lifting machines, in the absence of perpetual motion, after bringing the machine to (4) its initial state, the net lifted weight should be zero. I.2.B Ideal machines and reversible processes Consider an ideal frictionless lever. 4 m’ Y 3 1 meter g 1 Figure 2. An ideal machine. A massless, friction free, weight lifting machine. We wish to lift a block of mass 3m. For that purpose, the block of mass 3m is placed at the bottom on the right side of the lever, and a mass m’ is placed at the left of the lever at a height h= 1 m. Here m’ is slightly smaller than m. [ m’ = m - with 0 ] . Since m’ < m the system in Fig. 3 will remain stationary. Y m’ g 3 1 meter 1 3m Figure 3. Lever in its initial position. Let’s try to design a reversible machine out of this weight-lifting machine prototype. Notice in Fig. 3 that the lever will be able to lift the block of mass 3m if some additional energy K were added to the mass m’. K Y K m’ g g 3 1 meter 1 1 meter 3m 1 m ’ 3 3m X Figure 4. Lifting a mass 3m. Left: A little bit of kinetic energy is given to m’ just to make m’ to go down to the bottom level while lifting the 3m block. Right: Once the mass m’ is at the bottom, the mass 3m has been lifted a distance X. Let’s choose the magnitude of K such that, afterwards, m’ lowers down to the ground level height=0 , and the lever becomes stationary. Thus, the lever machine is able to lift the block 3m to a height X (see right diagram in figure 4). At this stage, we clamp the lever to, momentarily, avoid further motion. 5 The motion could continue if we just unclamp the lever (this occur because m’ is slightly less than m, so a small torque acts on the lever). When m’ reaches a height of 1 meter, it would have a kinetic energy K. We can place a spring at the proper position such that , when the mass m’ reaches the height 1 m, the energy K gets stored into the spring. Right after this occurs, K we clamp the lever again. K Y m’ g 1 meter 3 g 3 3m 1 m ’ Spring compressed a bit 1 meter 1 X 3m X Figure 5. Reverse process of Fig.4 to bring down the mass 3m. Left: The lever is unclamped. Right: Masses m’ and 3m are back to their initial positions (as in Figure 3), after which the lever is clamped again. If we wanted to lift the 3m block again, all we need to do is to unclamp the lever. We notice we can repeat this process, back and forth, again and again. What we have, then, is a reversible process: The work (energy) that the lever invested in lifting the 3m block by a distance X (Fig. 4) is at the expense of lowering the mass m’ by 1 meter. By operating the lever in reverse, mass m’ is lifted at the expense of lowering the 3m block (Fig. 5). (5) Notice that for operating this reversible process, we (the external agent) just need to clamp and (! ) unclamp the lever during the process; i.e. we do not input into, nor extract from, the machine any energy. K K Y m’ g 3 1 meter g 1 meter 1 3m m ’ X 3 1 3m X Figure 6. Reversible machine. Left: Releasing a clamp on the top left (no shown in the figure) allows the machine to lift the mass 3m a distance X. Right: Releasing a clamp on the bottom left (no shown in the figure) allows the machine to lower the mass 3m to the bottom. 6 I.2.C Reversible and non-reversible machines The machine in Fig 6, described above, is called a reversible machine. It is an ideal machine (where friction is absent), which is in fact unattainable no matter how careful our design. Its concept is however useful, for comparing it with other non-reversible machines. Reversibility has the connotation that the machine returns 100% of the energy invested on it. A non-reversible machine includes all real machines. They are subjected to friction and other adverse factors that detriment their motion. Comparing reversible and non-reversible machines. Consider the reversible machine shown in Figures 6; let’s call it “machine-A”. This machine lowers the mass m’ by 1 meter and lifts a 3m weight to a maximum height X; it can also run in reverse (as described above in Figure 5.) Consider another machine-B, which is not necessarily reversible. This machine lifts a 3m weight to a maximum distance Y, while lowering a mass m’ by one meter (m’ m) to its initial position (Fig. 7.) The mechanism of how machine-B operates is unknown. We now prove that Y cannot be greater than X. More general, we state that it is impossible to build a weight-lifting machine that, by lowering a mass m’ by one meter, it will lift a weight any higher than it will be lifted by a reversible machine. (6) Proof: Suppose Y >X. That is, the special (unknown) design of machine-B allows lifting the 3m block to a height Y while bringing the mass m’ one meter down. The design (its inventor claims) is so good that Y>X. K Y STARTING STATE m’ Machine-B 3 1 meter 0 Unknown arbitrary design Machine-B g 1 meter Y 3m 3m 3 m’ X Unknown arbitrary design Y 1 X Figure 7. A non-reversible machine. Left: Initial state. Right: After one step operation. Once the 3m block is at Y, we can let it free-fall to a height X and thus obtain free energy. 7 g Machine-B Free energy 3m 3 Unknown arbitrary design 1 meter m’ Y 1 X Figure 8. The mass 3m is brought from the height Y to a height X, thus releasing energy. We then transport the masses to the machine-A. The mass m’ (being already at the lower position) is placed at the left side of the lever; and the block of mass 3m (being already at the height X) is placed at the right side of the lever (see figure 9.) K Machine-B Machine-A 3 Unknown arbitrary design 1 meter m’ Y 1 1 meter 1 3 X X K Machine-B Machine-A 3 Unknown arbitrary design 1 meter Y 1 1 meter X 3m 1 m’ 3 X Figure 9. Masses from machine-B transported to machine-A. We now run the the machine-A K backwards (raising the mass m’). K Y m’ g 1 meter 1 m’ 3 3 3m 1 meter 1 X 3m X Figure 10. Machine-A operated in reverse. If we now proceed to transport the masses to machine-B, we would have brought all the masses (m’ and 3m) to their initial height (shown in Figure 7). 8 K Y Machine-B m’ 3 3 Unknown arbitrary design 1 meter 1 meter 1 K 3m X K Y X Y Y FINAL STATE m’ Machine-B g 3 3 1 meter 1 meter 1 X 0 Unknown arbitrary design Y 1 3m X Figure 11. Transfer of masses from machine-A to machine-B. The latter one ends up at its initial state (as in Fig. 7). Not only both machines would have been brought to their initial states. In addition, we would have had extra energy (when the 3m block was thrown from Y to X, as shown in Fig. 8). But this would constitute perpetual motion, which we postulate is not possible. Therefore Y cannot be greater than X. Accordingly, among all the machines that can be designed, the reversible machines are the best. They lift the 3m block to the highest height. (7) I.2.D Universal behavior of reversible machines All reversible machines must lift the 3m block to exactly the same height. Notice the proof of this statement is similar. If one reversible machine-C were to lift the 3m weight to a height Z >X, we could free fall that block to a height and then operate machine-A in reverse. This would constitute perpetual generation of free energy, which is not possible. Therefore, Z cannot be higher than X. But X cannot be smaller than Z either. (The same argument used above with Z and X interchanged). Therefore, all reversible machines lift the 3m block up to the same height. (8) This is a remarkable observation because it permits us to analyze the height at which different machines are going to lift something without looking at the interior mechanism. If somebody makes an enormous elaborated series of lever that lift a 3m block a certain distance X by lowering a mass m by one unit distance, and we compare it with a simple lever that does the same thing and is fundamentally reversible, his 9 machine will lift it no higher, but perhaps less height. If his machine is reversible, we also know exactly how high it will lift. In summary, we have a universal law: Every reversible machine, no matter how it operates, which drops one kilogram by one meter and lift a 3-Kg weight, always lifts it the same distance X. (9) The next question is: what is the value of X? I.2.E Figuring out the actual lift capability of the reversible machine 3 m’ Y Feynman now introduces an ingenious procedure to figure out the value of X. alluded in the machines above. Fig. 12 shows a reversible machine that lifts three blocks a distance X by lowering one block a distance 1 meter. (By comparison with Fig. 6, the spring is omitted in Fig.12 for simplicity). The blocks on the right side are located on weightlesscompartments separated,3by design, a vertical distance X. For convenience, a fixed rack (with shelve compartments also separated a distance K located near the machine, as shown on the right side of figure 12. X) is conveniently Y m’ 1 meter 0 1 meter 0 X X Figure 12. Left: Reversible machine (with slight modification relative to the machines described in the paragraphs above). Right: An additional rack of shelves has been placed for convenience at the right side. The left side of Fig. 13 shows the position of the blocks after operating the machine, lowering one mass on the left by 1 meter, and lifting each of the three masses on the right by a distance X each. Subsequently, the masses on the right are displaced laterally and deposited into the rack (diagram at the right in Fig. 13). Since the latter involves just lateral motion, we assume there is no need to invest energy to undertake this step (recall we are assuming there is no friction). 10 3 3 Y m’ m’ 1 meter 1 meter 1 meter X 0 X Figure 13. After operating the machine (left), the masses are emptied from the machine and loaded into the rack (right). Comparing in Fig. 13 the position of the masses on the right side, before and after the machine operation, we notice that, the net effect of bringing one block down one meter (on the left side) is to lift just one block from the bottom to the top (10) by a distance 3X. 3 m’ The reason is that shelves #2 and #3 effectively remain filled in both cases (before and after the machine operation). The only difference is that shelve #1 was filled at the beginning and empty at the end, while shelve #4 was initially empty but is filled at the end. Therefore, energy wise the block in shelve #1 “jumped’ to shelve #4; i.e. on the right side one block was raised by a distance 3X. Next, let’s put the machine back to its initial state. Notice in Fig. 14 that this can be done without investing energy.3 First, shelve #4 is emptied by moving (laterally) the mass to the left side. Second, the mass on the bottom left is laterally moved to the K shelve #1 on the right. m’ 1 meter 1 meter 0 1 meter 0 1 meter 3X X X Figure 14. Lateral motion of the masses to restore the machine to its initial state (as in Fig. 12). Notice, the machine is now back to its initial state (compare Fig. 12 to Fig. 14). We claim that 3X has to be equal to 1 meter. So X= 1/3 meter. (11) Indeed, since by lowering one mass by a meter on the left side produces a lift of one by a distance 3X on the right side, then 3X has to be equal to 1m. Otherwise, i) if 3X were, for example, higher than 1 meter, we could throw the masses on the right by a distance such that the top mass aligns with the 1 meter level; we would get that 11 free energy available for other useful work. Then we would proceed to put the machine to its original state by translating the masses laterally (the top to the right, the one at the bottom to the right). That way we would have obtained free energy in the process and placed the machine back to its initial state. However, this would constitute perpetual motion. ii) Similarly, if 3X were smaller than 1m, we would start with the masses on the right at their high level. Operating the machine in reverse, we would bring the three masses down, while lifting the mass at the lift by 1 meter. We could then throw the left mass to a level equal to 3X, thus obtaining free energy (useful for other work). Then we move the masses laterally (the top-left mass to the right side, and the one at the bottom of the shelf to the left side). We would have restored then the machine to its initial stat and had obtained free energy in the process; i.e. ready for perpetual motion. In short, if the lifting weight machine is reversible then 3X has to be equal to 1 meter. I.2.F The Potential Energy We can generalize then expression (11): One block falls a distance “h” in operating a reversible machine; and the machine can lift “p” blocks by a distance “h/p”. Or, if we use more than one block on the left side: (Weight) x (distance) on the left side equals (Weight) x (distance) on the right side. We call the weight times the height gravitational potential energy. Gravitational potential energy of an object = weight x height We state that The potential energy, when operating the machines in a cycle, conserves (12) (13) Quoting Feynman: This is a very beautiful line of reasoning. The only problem is that perhaps it is not true. (After all, nature does not have to go along with our reasoning.) For example, perhaps perpetual motion is, in fact, possible. Some of the assumptions may be wrong, … It turns out, it is found experimentally that expression (13) is, in fact, true. 12 II. CONSERVATION of ENERGY in MULTI-PARTICLES SYSTEMS Ref: This section taken from University Physics, by Ronald Lane Reese, Vol. 1, Ch. 13] II.1 The Classical Work Energy (CWE) Theorem: Case of a single particle First, let’s consider the CWE theorem for the case of a single particle. Consider a particle of mass m, which moves from the initial position indicated by “i” to the final position “j” along the dashed curve shown in the figure. During its motion, a net force F acts upon the particle. total f m dr Ftotal i f r Wtotal ( i f ) = Ftotal. dr i r is the vector position of the particle Figure 15. Force acting on a particle. As the particle moves from the initial position I to the final position, the force does work on the particle. f Ftotal. dr f = i m a. dr i But notice, a. dr = d v . dr = dv . d r = dv . v dt dt = v. dv = 1 d(v . v ) = 1 d(v2) 2 2 Accordingly, f Ftotal. dr i f = 1 2 m d(v2) i = 1 m [ (vf) 2 - (vi) 2 ] = Kf - Ki 2 That is, Wtotal (i f ) = Kf - Ki (14) 13 The work done on the particle by all the forces is converted into kinetic energy of the particle. Equivalently, Wtotal = K (14)’ The contribution to the total work may come from conservative forces and other nonconservative forces; Wtotal = Wconsrv + Wother The nature of conservative forces is that they can be derived from a potential energy function PE, such that, Wconsrv = - PE) Using the last two expressions in (14), one obtains Wother = K + PE) ; or, Wother = K + PE ) (15) The sum of potential energy and kinetic energy of the particle at any point in space is called the total mechanical energy E. Wother = E The work done on the particle by the “other” (non-conservative) forces acting the particle is converted into mechanical energy of the particle. (16) II.2 The Classical Work Energy (CWE) Theorem: Case of a multiple particle rigid body The result in (16) is extended to a multiple particle rigid body system. In such a case, the internal forces between any pair of particles in the system are assumed to point along the direction that joins the pair; the result is then that the work done by all the internal forces is zero. The result in (16) then holds, although the calculation of the total mechanical energy becomes more involved. Wother = E The work done on the particle by the “other” (non-conservative) forces acting the particle is converted into mechanical energy of the system of particles in the rigid body. (17) Indeed equation (17) allows us to calculate the velocity at which a cylinder, rolling down through an inclined plane, will arrive to the bottom after being release from a given height. 14 II.3 Limitation of the CWE theorem We are already familiar with the CWE theorem, which establishes the source (work) that causes a change in the kinetic energy of a system. Fig. 15 illustrates this theorem for the case of an individual particle. There exist examples also shown its validity when describing the dynamics of system of particles constituting a rigid body. The later allowed us to solve, in a very straightforward manner, problems involving bodies rolling down an inclined plane, for example. But, until now, cases involving the work done by internal forces in non-rigid bodies have not been considered. We will consider one of such a cases in the next example. Case: Inelastic collision Fig. 17 considers the inelastic collision between two objects. This example illustrates, as we will explain below, the need for generalizing the CWE theorem, in order to include cases in which disordered (microscopic) energy is involved. Before the collision Both particles are initially at the same temperature and in thermal equilibrium v m At rest frictionless Kinetic energy: Kbefore = ½ m v2 i M X Figure 15. Two blocks before undergoing a collision. After the collision V’ (m+M) frictionless Kinetic energy: Kafter = ½ (m +M) V’ 2 i X Figure 16. Two blocks after an inelastic collision. Since the linear momentum is conserved mv = ( m + M ) V’. Thus, V’ = mv / ( m + M ), which gives, Kafter = ½ (m +M) [ ( m /(m+M) ) v ]2 = ½ [ ( m2 / (m + M) ] v2 = ½ m v2 [ ( m / (m + M) ] = Kbefore [ ( m / (m + M) ] The change in kinetic energy is given by, K = Kafter - Kbefore = [ ( m / (m + M) - 1 ] Kbefore 15 = - [ ( M / (m + M) ] Kbefore that is, the kinetic energy is less after the collision than before. According to the CWE theorem this change should have resulted from the work done by the forces acting on the system. But notice, all the external forces acting on the system (normal forces and weight) perpendicular to the displacement of the particles, Both particles initially atare the same rest(WN = 0, WW = 0.) That is Wother in expression temperature and in thermal equilibrium hence, their work on the system isAtzero (17) is zero. Nm NM frictionless i (m+M) X W1 W2 Figure 17. External forces acting on the system are perpendicular to the displacement. Hence Wext =0. Apparently, then, the CWE theorem, as written in expression (17) is not valid to describe this inelastic interaction. However, the experiment is valid; that is, it is observed a decrease in the total mechanical energy after the collision. Thus, this example reveals the need to modify the CWE theorem. As described in the next section, we will have to include the possibility that the total mechanical energy can be transformed into kinetic energy taken away by the microscopic constituents (atoms, molecules) of the two macroscopic bodies. Such an increase of the kinetic energy of the microscopic components is then at the expense of the macroscopic mechanical energy. As a consequence, the temperature (a concept ascribed to the motion of microscopic particles) of the object will increase. In short, in an inelastic collision, the change in mechanical energy of the system (change in macroscopic kinetic energy in this case) is converted into microscopic energy U II.4 Generalization of the Classical Work Energy (CWE) theorem: its extension to a thermodynamic system In a rigid body, we can predict the motion of every particle of a rolling cylinder. In a more general case, a real body is not rigid; it deforms. Some regions may acquire higher kinetic energy than other region, so an additional channel of energy distribution may surge. It is clear then that expression (17) will have shortcomings to predict the motion of this more general type of system. Accordingly, the purpose of this section is to generalize the result (17). Such a modification will lead us to state the first law of thermodynamics. 16 Expression to be modified: Wother = In the CWE, the term on the left side consideres WORK as the only mechanism to change the kinetic energy of the system. We will extend it to include heat-transfer, driven by temperature difference, as another mechanisms that causes the energy of a system to change. E In the CWE the term E includes only the (macroscopic) mechanical energy. We will extend this right term to include also, in addition to the mechnical enery E, all types of microscopic interactions processes that lead to corresponding potential and kinetic energies. II.4.A Modification of the right side of Eq. (17) Macroscopic and microscopic contributions to the total energy In the right side of expression (17), E stands for the changes in the mechanical energy of the system. The modified version will replace the change in the mechanical energy E with one expression that includes, in addition, the change of the total energy of a system. The total energy of a system has two distinct contributions: A macroscopic energy, the total mechanical energy E of the system, associated with the macroscopic position and motion of the system as a whole. A vast collection of microscopic energies, known collectively as the internal energy U of the system. II.4.A1 The macroscopic mechanical energy E is the sum of: - Kinetic energy of translation of the center of mass and the rotational kinetic energy about the center of mass. - Potential energies associated with the position of the center of mass of the system on space, be they gravitational, elastic, or other potential energies associated to other interactions (i.e. electrical forces). Since the zero reference of these potential energies is arbitrary, only the changes in the total mechanical energy are physically significant when the system changes its state of mechanical equilibrium. That is, E is physically important, not E itself. II.4.A2 The microscopic internal energy U of the system is the sum of: - the individual kinetic and potential energies associated with the motions and interactions of all the individual particles (atoms and/or molecules) of the systems. - Many of these interactions involve rather complicated potential energy functions on a microscopic distance scale. 17 Since the zeros of these microscopic potential energy functions, we can talk about a definite value for the internal energy of the system when it is in a state of thermodynamic equilibrium, but this is a rather complicated endeavor. When the system changes its state of thermodynamic equilibrium, it is only changes in its internal energy U that are physically significant in thermodynamics. Uinternal= 12mi ui 2 12 Pij i RCM i, j VCM Emacro = (1/2) MvCM2 + + (1/2) I 2 + Mgz “Disordered” energy (gas molecules inside the container.) ui = velocities Pij = potential energies Ordered energy (of the can cylinder) Fig. 16 Identifying the macroscopic and microscopic contributions to the total energy The mechanical energy E of a system is also referred to as ordered energy. This may responds to the fact that, because of its macroscopic character, one can track its location (i.e. because one is able to track the location of the center of mass). The internal energy U of a system is called disordered energy due to the microscopic untracked motion of the system’s many constituent particles. II.4.B Modification of the left side of Eq. (17) The transfer of Energy In the left side of expression (17), Wother stands for the macroscopic mechanical work done on the system (see figure 15 above). This mechanism is the way to provide kinetic energy to the system (the system in that case is a particle, or a rigid body).We are going to generalize this concept. Energy can be transferred to a system (from other systems) by two mechanisms or processes: via work, exerted by macroscopic objects (i.e. driven by external macroscopic forces). We will see that Work done on a system is a macroscopic mechanism for transferring energy to a system. via heat transfer, caused by temperature difference. We will see that Heattransfer to a system is fundamentally a microscopic mechanism for transferring energy to a system. II.4.B1 Macroscopic external work W ’ done on a system The macroscopic external work W’ done on a system can cause a change in either 18 - the internal energy U of the system, or the total mechanical energy E of the system Example where the external work causes a change of purely internal energy: Insulation (no heat transfer F Gas External non conservative force) Q=0) Fig. 17 Work done by a external force. The work is used to increase the internal energy U of the gas. Gas enclosed in an insulating container. The insulated walls ensure an absence of heat transfer (i.e. interchange of kinetic energy) from or toward the system (the gas.) Movable piston allows an external agent to compress the gas (by pushing the piston), thus doing work on the system. The work on the gas by the external agent results in an increase of the gas temperature (indicative of an increase in the internal energy U.) Example where the external work causes a change of purely mechanical energy: Using the same system of the example above, simply lifting the gas container would be an example of increasing the mechanical energy of a system, without changing the internal energy. II.4.B2 Heat-transfer Q Mechanisms for heat transfer are fundamentally microscopic (at the atomic and molecular level.) Heat transfer occurs by random molecular collisions and other essentially molecular interactions (via via conduction, convection, and radiation). The direction of heat transfer is from the higher to the lower temperature (an aspect better explained in the context of the second law of thermodynamics.) Warning: Do not confuse heat-transfer Q with the internal energy U. Heat transfer is not a property of the state of a system. (a system in thermal equilibrium does not have an amount of heat or heat-transfer.) On the other hand, a system in thermal equilibrium does have (in principle) a specific internal energy U. That is, Q is not a state variable U is a state variable 19 II.4.C Fundamental Energy Conservation Law Generalization of the classic work/kinetic-energy theorem The ideas expressed in II.4.A and II.4.B about a) the total energy of a system and b) the energy transfer into a system are consolidated here into a fundamental energy conservation law. We express the generalized classical work energy (CWE) theorem as follows, Q + Winternal + W ’ext-non-conserv + Wext-conserv = (18) = KCM + Kmicroscopic In expression (18), Q is the heat-transfer into the system caused by temperature difference between the system and the external world. It explicitly separates out the macroscopic work (done by external macroscopic forces, whether conservative or not) from the work done by microscopic forces. W’ext-non-conserv refers to the work done by forces that cannot be classified as conservative, like, for example, the force pushing the piston in Fig. 17 above. Wext-conserv stands for the work done by a macroscopic object. It could refer, for example, to the the gravitational force. It is assumed that the kinetic energy changes in both forms: macroscopic (the CM kinetic energy) and microscopic (the chaotic motion of the microscopic atoms or molecules). Let’s modify expression (18) a bit, in order to express it in terms of more frequently used quantities. First, for external conservative forces, the work can be derived from a potential energy function Ep, Wext-conserv = - Ep (19) which gives in (18), Q + Winternal + W ’ext-non-conserv + (-Ep ) = KCM + Kmicroscopic Q + Winternal + W ’ext-non-conserv = ( KCM + Ep ) + Kmicroscopic (20) By calling KCM + Ep ≡ Emacro the macroscopic mechanical energy, (21) expression (20) can be written as, Q + Winternal + W ’ext-non-conserv = Emacro + Kmicroscopic 20 (22) Second, we can envision that, ultimately, Winternal causes a change in the microscopic potential energies of the interacting microscopic particles that constitute the system. That is, Winternal = -Pij. Replacing this expression in (22) we obtain, i j Q + Q + i j -Pij + W ’ext-non-conserv = Emacro + Kmicrosc W ’ext-non-conserv = Emacro + Kmicrosc + i j Pij The last two terms in the right side of the expression above constitute what we called at the beginning of this section the disordered internal energy U of the system. Q + W ’ext-non-conserv = Emacro + Kmicrosc + i j Pij (23) Change in the internal energy U Through the derivation process given above, we notice that the work energy is deposited (transformed) into the system as either, macroscopic mechanical energy, or internal energy. The work Wext-conserv done by conservative macroscopic external forces has been assimilated into the mechanical energy, while the work Wint done by microscopic forces ended up being grouped into the internal energy term. The expression above also shows that the work energy W’ext-non-conserv done by external non-conservative forces could end up either as macroscopic mechanical energy or internal energy (the latter case is illustrated in Fig. 17 above where a gas was compressed by a piston; the force acting on the piston is the non-conservative force.) In summary 21 + W’ext-non-conserv Q Heat-transfer into the system caused by temperature difference Emacro = Change in macroscopic mechanical energy of the system Work done on the system by a nonconservative macroscopic external force U + (24) Change in the internal energy U of the system which constitutes our Fundamental Energy Conservation Law. Energy is transferred to a system by heat-transfer Q into the system and by work W’ done on the system Inelastic collision (revisited) Before the collision Both particles are initially at the same temperature and in thermal equilibrium v m At rest frictionless Kinetic energy: Kbefore = ½ m v2 i M X After the collision V’ (m+M) frictionless Kinetic energy: Kafter = ½ (m +M) V’ 2 i X Here Q is the flow of energy by heat transfer, caused by temperature differences. In our case it is zero. W’ is the work done by external forces. In our case it is zero. U change in the internal energy E change in the mechanical energy In this case E = - [( M / (m + M) ] ½ m v2 Accordingly, in expression (24) we have, 0 + 0 = - [( M / (m + M) ] ½ m v2 ) + U which gives, U = [( M / (m + M) ] ½ m v2 ) That is, the missing (ordered) macroscopic kinetic energy appears as an increase in the internal (disordered and essentially microscopic in character) energy U of the system. 22 nsulation no heat transfer Q=0) nsulation no heat transfer Q=0) The increase in the internal energy of the system typically manifest itself in an increase in the temperature of the system. As the temperature of the system increases above the ambient environment because of the increase in the internal energy, heat-transfer subsequently occurs from the system to the environment until the system-ambient reach a common temperature. II.5 Case: Pure Thermodynamics In pure thermodynamics, one typically considers only systems whose total mechanical energy does not change, Emacro = 0. The general statement of the energy conservation becomes, Q + W’ext non-conserv = U (25) where W’ext non-conserv is the work done by external nonconservative force on the system. Notice Before After F F Work done by the external force F > 0 W’ext non-conserv > 0 Before After F F Work done by the external force F < 0 W’ext non-conserv < 0 It is typical to consider the work done by the system (no the work done on the system by the external non-conservative forces.) Since, according to the Newton’s third law, the force exerted by the system is equal in magnitude but opposite in direction, then W’external non-conservative = - W done-by-the-system Thus, for pure thermodynamic systems 23 (26) nsulation no heat transfer Q=0) nsulation no heat transfer Q=0) - Wdone-by-the-system = U QHeat-transfer-into-the-system (27) When all the terminology is understood, the subscripts are omitted and one simply writes Q - W= U (27)’ The First Law of Thermodynamics Notice Before After F F Work done by the gas < 0 W <0 Before After F F Work done by the gas > 0 W >0 Question: wedge Before After W=? 24 Question: Consider two cases 1) a gas with initial volume Vi is free expanded to a volume Vf and then adiabatically compressed back to its volume Vi quasi-statically, after which the temperature of the gas has increased by T. 2) a gas with initial volume Vi is heated up causing its temperature to increase by T. What ius the entropy change in each case. 25